一种电磁流动控制流场特性实验PIV装置及方法
一种电磁流动控制流场特性实验piv装置及方法
技术领域
1.本发明属于电磁流动控制流场测试领域,具体涉及一种电磁流动控制流场特性实验piv装置。
背景技术:
2.主动流动控制是在物体流场中直接施加适当的扰动模式并与流动的内在模式相耦合来实现对流动的控制。主动流动控制的优势在于它能在需要的时间和部位出现,通过局部能量输入,获得局部或全局的有效流动改变,进而实现增升减阻、改善流场、抑制噪声等目的。电磁流动控制通过电磁力改变流体边界层的结构,是主动流动控制方法之一。电磁流动控制采用电磁力来控制具有一定电导率的流体的流动,尤其是弱导电流体(如海水、弱电解质溶液等)的流场结构,通过对流体边界层结构的重构与调整,从而改善流场结构和动力学特性。而且由于电磁力具有体积力的结构传输特征,能够在不改变原来流场的边界条件、不需要向流场传输质量的情况下,比较方便地向流场传输动量、能量以及祸量,从而可以有效地改变和构造流体边界层与流场的结构。将电磁激活板包覆于翼身融合水下滑翔机的表面,可在滑翔机表面附近的流体边界层内形成电磁体积力。如果形成的电磁力方向平行于流体运动方向,可使流体加速,从而抑制边界层分离、消除涡街,达到减阻减振的目的。
3.因此需要研究电磁流动控制对翼身融合水下滑翔机边界层流体的掺混和流动分离再附作用对翼身融合水下滑翔机阻力系数和升力系数的影响规律和影响机理。设计相应的实验探究,通过电磁流动控制翼身融合水下滑翔机流场特性测试对电磁流动控制对翼身融合水下滑翔机流动分离和水动力学特性影响的规律及机理进行探究。
4.粒子图像测速(piv)是一种非接触式测量。piv对流场的测量是基于光学成像原理实现的,不需要任何探测设备伸入到流场中去,所以具有不干扰流动的优点。唯一与流动发生接触的是示踪粒子,为保证良好的跟随性,其直径都很小,对流动的影响要远远小于探针式设备的干扰全场测量。这是其他流场测量技术无法与piv比拟的地方。piv属于多点瞬时测量技术,能够记录多维空间尺度的全分量速度场信息。虽然热线技术通过使用多个探针也能做到多点采集,但其空间分辨率是不能跟piv相提并论的,而且对流场的干扰也更严重。piv测量的多维性与相干结构的三维性特征不谋而合,使其尤其适合于辨识和提取流场中复杂的相干结构。湍流相干结构的实验研究的突飞猛进与piv的广泛应用是分不开的。
5.陈耀慧.翼型绕流的电磁力控制[d].南京理工大学,2009.提出了一种在高稳定水槽中对翼型绕流控制的电磁力进行的试验研究方法,利用高锰酸溶液对翼型绕流的流场进行显示,属于染色线实验,无法对于翼型周围流场细节与湍流结构进行跟踪,本研究提出使用空心玻璃珠做为示踪粒子,采取ccd相机对于水下滑翔机水翼周边流场细节进行捕捉,可对流场进行精细捕捉,占用体积小,测试精度高,是一种具有较大工程实用价值的实验装置。
技术实现要素:
[0006]
要解决的技术问题:
[0007]
为了避免现有技术的不足之处,本发明提供一种电磁流动控制流场特性实验piv装置,使用空心玻璃珠做为示踪粒子,采取ccd相机对于水下滑翔机水翼周边流场细节进行捕捉,能够在一定的范围内对电磁流动控制下的水下滑翔机水翼周边流场细节进行捕捉对流场特性进行测试;可对流场进行精细捕捉,占用体积小,测试精度高,是一种具有较大工程实用价值的实验装置。
[0008]
本发明的技术方案是:一种电磁流动控制流场特性实验piv装置,包括控制台、水槽、驱动装置、电磁流动控制模型和piv系统,所述水槽用于提供流体实验环境;由所述驱动装置控制电磁流动控制模型在水槽中运动,控制piv系统跟随电磁流动控制模型运动,对电磁流动控制模型周围流场细节和湍流结构进行精确捕捉;
[0009]
所述控制台用于驱动装置和piv系统的信号接收、处理及控制。
[0010]
本发明的进一步技术方案是:所述piv系统包括ccd相机和激光器,ccd相机通过相机支撑安装于驱动装置上,激光器通过激光支撑架安装于驱动装置上,均与电磁流动控制模型同步运动。
[0011]
本发明的进一步技术方案是:所述相机支撑上设置有多个安装孔槽,通过改变ccd相机的安装位置改变流场拍摄区域。
[0012]
本发明的进一步技术方案是:所述电磁流动控制模型为标准翼型或水下滑翔机水翼,在翼型表面布设电场条和磁场条用于产生配套电磁场,电磁场大小通过所述控制台的电磁控制系统集中控制。
[0013]
本发明的进一步技术方案是:所述电磁流动控制模型通过模型支撑柱安装于驱动装置上,通过驱动装置控制电磁流动控制模型在水槽中的运动和姿态调节。
[0014]
本发明的进一步技术方案是:所述水槽为环形水槽,环形水槽内投放piv显影粒子-空心玻璃珠,用于进行piv实验。
[0015]
本发明的进一步技术方案是:所述驱动装置包括悬臂和中央立柱,所述中央立柱位于环形水槽的中心处,悬臂的固定端固定于中央立柱上;通过控制台控制中央立柱转动,进而带动悬臂的自由端在环形水槽上方沿周向转动。
[0016]
本发明的进一步技术方案是:所述控制台包括ccd相机信号接收、信号同步器、信号处理系统、电磁流动控制台和电源柜。
[0017]
本发明的进一步技术方案是:还包括遮光棚,所述遮光棚由铝合金支架和遮光布搭建而成,为piv实验提供黑暗环境。
[0018]
一种电磁流动控制流场特性实验piv装置的实验方法,首先,将所述电磁流动控制模型和piv系统安装于驱动装置上;然后,由控制台控制驱动装置带动电磁流动控制模型在水槽中的运动和姿态调节,同时piv系统对流场进行拍摄;再由控制台接受并处理piv系统的信号,对电磁流动控制模型周围流场细节和湍流结构进行精确捕捉,实现对流场的测试。
[0019]
有益效果
[0020]
本发明的有益效果在于:本发明提供一种使用粒子图像测速法进行水下电磁流动控制流场特性实验的实验装置,相较于传统的染色线实验测试装置,piv法可对滑翔机周围流场细节和湍流结构进行精确捕捉,所有测量装置不进入流体,不会对流场结构产生干扰,
是一种小体积、高精度、非接触、响应速度快的水下滑翔机电磁流动控制流场特性实验的实验装置。
附图说明
[0021]
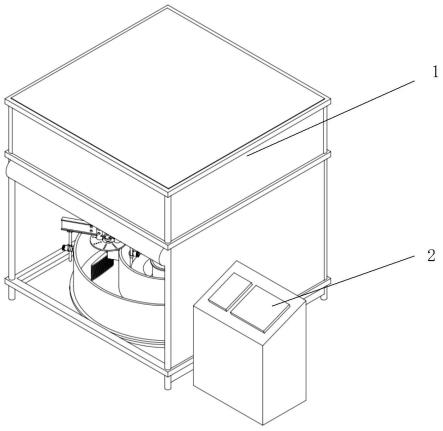
图1为实施例中水下滑翔机电磁流动控制流场特性测试实验装置示意图;
[0022]
图2旋臂水池系统结构示意图;
[0023]
图3piv系统及其支撑结构示意图;
[0024]
图4电磁流动控制系统示意图;
[0025]
附图标记说明:1-遮光棚;2-控制台;3-悬臂;4-中央立柱;5-环形水槽;6-ccd相机支撑;7-ccd相机;8-激光器;9-激光支撑架;10-模型支撑柱;11-电磁流动控制模型。
具体实施方式
[0026]
下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0027]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0028]
参照图1-4所示,本实施例基于粒子图像测速法的水下滑翔机电磁流动控制流场特性测试实验装置,包括遮光棚1、控制台2、水槽、驱动装置、电磁流动控制模型11和piv系统,所述水槽用于提供流体实验环境;由所述驱动装置控制电磁流动控制模型11在水槽中运动,控制piv系统跟随电磁流动控制模型运动,对电磁流动控制模型11周围流场细节和湍流结构进行精确捕捉,实现对流场的测试。;控制台2用于驱动装置和piv系统的信号接收、处理及控制。
[0029]
优选的,所述遮光棚1由铝合金支架和遮光布搭建而成,为piv实验提供黑暗环境。
[0030]
优选的,所述控制台2包括ccd相机信号接收、信号同步器、信号处理系统、电磁流动控制台和电源柜。
[0031]
优选的,所述水槽为环形水槽5,环形水槽5为流体实验区域为亚克力玻璃结构,下方设置橡胶支撑垫。实验时在环形水槽内投放piv显影粒子-空心玻璃珠,进行piv实验。
[0032]
优选的,所述驱动装置包括3悬臂和4中央立柱,中央立柱4带动悬臂以特定转速旋转,悬臂3上设置相关支撑结构以带动模型。在中央立柱4上设置旋转理线机构避免线缆缠绕。
[0033]
优选的,所述piv系统包括ccd相机支撑6、ccd相机7、激光器8、激光支撑架9。ccd相机7通过ccd相机支撑6连接在悬臂3上,跟随模型同步运动。ccd相机支撑6上有多个架设相机的孔槽,可以通过改变ccd相机架设位置改变流场拍摄区域。ccd相机像素1280pix
×
800pix配有图丽微距镜头配有软件信号同步器。激光系统单个光路最小能量20m最大触发频率为2929hz j,输出激光波长为527nm最大触发频率为2929hz。激光器通过激光支撑架与悬臂连接。同样跟随悬臂3一同旋转。
[0034]
所述电磁流动控制模型11为标准翼型或水下滑翔机水翼,在翼型表面布设电场条和磁场条用于产生配套电磁场,电磁场大小通过电磁控制系统集中控制。电磁流动控制模型通过模型支撑柱与悬臂连接,模型支撑柱可以完成模型姿态调节。
[0035]
本实施例提供一种水下滑翔机电磁流动控制流场特性实验piv装置的实验方法为,首先,将所述电磁流动控制模型和piv系统安装于驱动装置上;然后,由控制台控制驱动装置带动电磁流动控制模型在水槽中的运动和姿态调节,同时piv系统对流场进行拍摄;再由控制台接受并处理piv系统的信号,对电磁流动控制模型周围流场细节和湍流结构进行精确捕捉,实现对流场的测试。
[0036]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1