基于梯度复合一体化结构的宽线性响应范围力触觉传感器
1.本发明涉及一种基于梯度复合一体化结构的宽线性响应范围力触觉传感器,属于触觉传感技术领域。
背景技术:
2.近年来,随着科学技术的迅速发展,人工智能和物联网相关研究成为了世界研究的焦点,各国学者希望人工智能设备(机器人、假肢)具备和人体一样的感知能力(视觉、听觉、触觉)并开展了一系列研究,其中视觉和听觉通过现有传感技术和算法结合取得了实质性突破,这些技术可以使人工智能具备类人体的视觉和听觉。但触觉感知一直进展缓慢,没有得到有效突破,因此赋予人工智能设备人体皮肤触觉感知成为了急需突破的关键技术。
3.触觉感知的赋予可以使机器人、假肢等人工智能设备在多场景下精准快速的抓取目标物体。而高性能的触觉传感器是实现智能触觉感知最重要的技术方式,是机器人、假肢等人工智能设备完成智能精准抓取和识别物体必不可少的关键部件。高性能触觉传感器需要满足线性、大响应范围、高灵敏度及快响应时间特性,高灵敏度标志着触觉传感器能够精准识别物体,快响应时间说明触觉传感器能够快速响应抓取,大响应范围可以使触觉传感器在不同场景下应用,线性可以有效避免触觉传感器复杂的信号处理电路。为了实现高性能触觉传感器的制备,研究者们开展了一系列研究,他们通过引入微结构的方式,降低传感材料的弹性模量,有效的提高了灵敏度和响应时间,但只局限于小响应范围并呈现出非线性的趋势,这一问题的存在将大大限制触觉传感器在人工智能领域的应用。
4.上述分析认为,现阶段无法有效实现在大响应范围内保持线性、高灵敏度触觉传感器的制备,这一问题的存在会很大程度上降低触觉传感器在机器人、假肢等人工智能设备应用中感知外界环境和人机交互的精准度和场景利用率,会使机器人、假肢等人工智能设备的传感设备和信号处理电路复杂化。针对这一问题,我们通过设计梯度复合一体化结构和制备梯度复合一体化结构复合导电薄膜,实现了线性、高灵敏度、大响应范围及快响应时间触觉传感器的制备。这一触觉传感器的制备将大大简化机器人、假肢等人工智能的传感设备,为人工智能设备的轻型化制备提供有利条件。
技术实现要素:
5.本发明的目的在于提供一种基于梯度复合一体化结构的宽线性响应范围力触觉传感器的方法,提供一种适用于人工智能设备在不同场景下可以快速精准感知外界环境刺激的新型结构线性触觉传感器。
6.本发明一是提供一种基于梯度孔复合一体化结构的在大响应范围内保持线性和高灵敏度的新型触觉传感器,包括柔性衬底/电极、传感材料梯度复合一体化结构导电复合薄膜、封装层。
7.本发明二是提供了一种赋予人工智能设备在多场景下快速精准感知外界刺激信息传感器件的制备方法。
8.本发明三是提供了一种有效降低后期信号处理电路复杂程度的线性触觉传感器。
9.为了实现本发明的目的,实行了以下技术方案:
10.一种基于梯度复合一体化结构的宽线性响应范围力触觉传感器的方法的制备方法,由柔性衬底/电极、传感材料梯度复合一体化结构导电复合薄膜及封装层组成。
11.进一步的,传感材料梯度复合一体化结构导电复合薄膜由梯度复合一体化结构聚合物薄膜和导电材料构成。
12.进一步的,梯度复合一体化结构聚合物薄膜通过蒸汽法和模板转印法制备,厚度为400-500μm,所述的聚合物材料为聚二甲基硅氧烷pdms。
13.进一步的,制备梯度复合一体化结构聚合物薄膜的条件为:加热温度为150-250℃,优选为180-230℃,保温时间为10-30min,优选为15-25min。转印模板为具有间距为50-200μm,优化为50-150μm,深度为50-150μm的凹面,优化为50-120μm。
14.进一步的,所述的梯度复合一体化结构聚合物薄膜由梯度孔和其它微结构组成,比如金字塔结构、球状结构及柱状结构等,在梯度孔结构底部引入这些微结构。其中,梯度孔结构的孔径和孔隙由上之下呈现由大至小的趋势,底层达到致密,在致密层的底端引入具有金字塔结构、球状结构及柱状结构。这一结构的构建可以实现接触电阻响应机制增强导电通道响应机制。
15.进一步的,梯度复合一体化结构导电复合薄膜传感材料通过溶胀填充法制备,具体的,通过溶胀渗透方式使导电材料均匀分散至梯度复合一体化结构中。所述的导电材料为碳纳米管。
16.进一步的,将所述的传感材料梯度复合一体化结构导电复合薄膜放入等离子体清洗机中进行等离子体处理以增加其亲和能力,之后将两片柔性衬底/电极层压至传感材料的上、下方。
17.进一步的,采用聚合物材料将上述构筑的三明治结构器件进行封装,所述的聚合物材料为聚二甲基硅氧烷pdms。
18.与已有技术相比,本发明的有益效果为:
19.在本发明中,基于梯度复合一体化结构的宽线性响应范围力触觉传感器,与现阶段制备的触觉传感器相比,它通过结合导电通道响应机制和接触电阻响应机制实现在宽压力范围内具有优异的线性、高灵敏度及快响应时间等特性,这是现阶段普通触觉传感器无法同时实现的特性,需要多个普通触觉传感器通过集成而实现。宽响应范围、高灵敏度及快响应时间的触觉传感器特性可以赋予人工智能设备在多场景下快速精准感知能力,线性特性的触觉传感器可以大大地简化人工智能设备后期信号处理电路。因此这些特性使基于梯度复合一体化结构的宽线性响应范围力触觉传感器在人工智能设备应用中所实现的功能相当于多个普通触觉传感器集成实现的功能,并有效的简化了后期处理电路的复杂程度。大大简化了人工智能装置的传感设备,为人工智能设备的简便化、轻量化及小型化提供有利条件进。此外,基于梯度复合一体化结构的宽线性响应范围力触觉传感器的制备工艺简便、易于集成和产业化,这为该触觉传感器的实际应用提供了基础条件。
附图说明
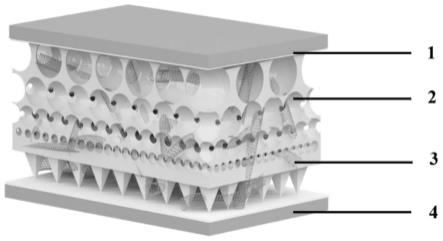
20.图1为基于梯度孔/金字塔一体化结构的线性触觉传感器的三维结构图;
21.图2为基于梯度孔/金字塔一体化结构的线性触觉传感器的制备流程图;
22.图3为梯度孔/金字塔一体化结构聚合物材料的断面扫描图;
23.图4为基于梯度孔/金字塔一体化结构的线性触觉传感器在不同压力下的i-v曲线;
24.图5为基于梯度孔/金字塔一体化结构的线性触觉传感器相对电流变化量随压力变化曲线;
25.图6为基于梯度孔/金字塔一体化结构的线性触觉传感器和基于梯度孔结构的触觉传感器电流相对变化量对比图;
26.图中标号:1上柔性衬底/电极;2梯度孔/金字塔一体化结构聚合物;3碳纳米管;4下柔性衬底/电极。
具体实施方式
下面将结合附图和实施例对本发明的技术方案做进一步说明,所述的实施例(梯度孔/金字塔一体化结构)仅用于说明本发明,而不应将本发明的保护范围限于所述实施例。
27.实施例
28.如图1所示,基于梯度孔/金字塔一体化结构的宽线性响应范围力触觉传感器包括上柔性衬底/电极1、梯度孔/金字塔一体化结构聚合物薄膜2、导电材料3和下柔性衬底/电极4。
29.所述梯度孔/金字塔一体化结构的宽线性响应范围力触觉传感器通过将柔性衬底/电极层压至梯度孔/金字塔一体化结构复合导电薄膜上、下方构筑而成,具体的制备步骤如图2所示,其核心部分为传感材料梯度孔/金字塔一体化结构复合导电薄膜,它由梯度孔/金字塔一体化结构聚合物材料和导电材料组成。其中梯度孔/金字塔一体化结构聚合物薄膜由梯度孔和金字塔结构组成,梯度孔结构的孔径和孔隙由上之下呈现由大至小的趋势,在致密层的底端引入具有锥状的金字塔结构。梯度孔结构可以通过导电通道响应机制以实现大响应范围、高灵敏度,但结果为非线性,引入金字塔结构可以通过接触电阻方式增强梯度孔结构的导电通道响应机制以实现线性。此外,柔性衬底/电极与传感材料紧密接触,以实现优异的电信号输出。
30.具体的,传感材料梯度孔/金字塔一体化结构复合导电薄膜由梯度孔/金字塔一体化结构聚二甲基硅氧烷薄膜和导电材料碳纳米管组成。其中,梯度孔/金字塔一体化结构聚二甲基硅氧烷薄膜由梯度孔和金字塔结构组成,在梯度孔结构底部引入金字塔结构。梯度孔/金字塔一体化结构聚二甲基硅氧烷薄膜通过蒸汽法和模板转印法制备,具体的制备方法为:首先,将单体和交联剂以10:1比例混合制备出聚二甲基硅氧烷的预聚物,之后迅速搅拌10min,并将其放入真空干燥箱真空除泡。将已抽真空的聚二甲基硅氧烷预聚物通过旋涂方式均匀分布在基底模板上,转速为600rpm,时间为60s。然后将基底模板放入高压釜中并将其加热至180℃,在此条件下保温10min。之后,取出基底模板,并剥离获得的梯度孔结构聚二甲基硅氧烷薄膜。之后,将梯度孔结构聚二甲基硅氧烷薄膜裁剪为2cm
×
2cm方形,待用。与此同时,将抽真空的聚二甲基硅氧烷预聚物通过旋涂方式均匀分布在具有金字塔结构的基底模板上,转速为1000rpm,时间为50s。之后将具有金字塔结构的基底模板放入鼓风
干燥箱中进行预加热,温度为60℃,时间为20min,待聚二甲基硅氧烷预聚物半固化时,将已制备的梯度孔结构聚二甲基硅氧烷薄膜紧密贴合至金字塔结构聚二甲基硅氧烷上,进一步加热固化,便获得了梯度孔/金字塔一体化结构聚二甲基硅氧烷薄膜。它的断面扫描图如图3所示,可以看出,该薄膜由梯度孔和金字塔结构组成,梯度孔的孔隙和孔径由下至上呈现出由大至小的趋势,顶层达到致密,并在顶层上方均匀地分布着金字塔结构。
31.具体的,传感材料梯度孔/金字塔一体化结构复合导电薄膜是通过溶胀填充的方式将导电材料碳纳米管均匀分散于梯度孔/金字塔一体化结构聚二甲基硅氧烷薄膜中制备的。具体的制备步骤为:首先将购买的多壁碳纳米管研磨、干燥以使碳纳米管易于分散,之后按3wt.%的配比称量所需材料,通过搅拌、超声将其分散于n-甲基吡咯烷酮,便获得分散均匀的多壁碳纳米管溶液,待用。
32.具体的,将上述制备的梯度孔/金字塔一体化结构聚合物薄膜放入稀释的n,n-二甲基聚酰胺溶液中,放置25min使其发生溶胀以实现预应变。之后将已溶胀的梯度孔/金字塔一体化结构聚合物薄膜放入多壁碳纳米管溶液中,经搅拌、超声获得传感材料梯度孔/金字塔一体化结构复合导电薄膜。
33.具体的,柔性衬底和电极材料采用的是聚对苯二甲酸乙二酯和氧化铟锡,通过电子束蒸镀或热蒸镀将氧化铟锡蒸发至柔性基底聚对苯二甲酸乙二酯形成薄膜电极,电极氧化铟锡厚度为45nm。之后将柔性衬底/电极聚对苯二甲酸乙二酯/氧化铟锡裁剪为2cm
×
3.5cm,待用。
34.具体的,将传感材料梯度孔/金字塔一体化结构复合导电薄膜放入等离子清洗机中进行氧等离子体处理使其增加亲和性,之后将其层压至上、下柔性衬底/电极聚对苯二甲酸乙二酯/氧化铟锡之间,之后采用厚度为100μm的聚合材料聚酰亚胺进行封装,便制备了基于梯度孔/金字塔一体化结构的线性触觉传感器。
35.图4为基于梯度孔/金字塔一体化结构的线性触觉传感器的在不同压力下的i-v曲线,图中不同压力下的i-v曲线呈线性分布,说明柔性衬底/电极和传感材料是欧姆接触。从图中可以看出,随着压力的不断增加,输出电流也不断增加。当压力由0kpa逐步增加为600kpa时,输出电流有着4个数量级的变化,这一变化量在触觉传感领域处于非常高的水准,说明了该传感器可以将0-600kpa范围内的压力有效转变为电流信号,说明它在该大的压力范围内具有好的响应。出现这种现象的原因是由于梯度孔/金字塔一体化结构中梯度孔结构和金字塔结构的共同作用,其中,大响应范围是通过梯度孔结构利用自身结构的梯度弹性模量实现的,梯度孔结构低弹性模量和高弹性模量部分对小压力和大压力产生响应。同时,大的电流变化量是通过金字塔结构通过接触电阻机制增强实现的,因为金字塔结构与电极之间初始接触面积非常小,这将导致大的接触电阻,当压力施加在传感器上,金字塔结构与电极之间的接触面积逐渐增加,导致大的电流变化。
36.图5为基于梯度孔/金字塔一体化结构的线性触觉传感器的电流相对变化量随压力变化曲线,从图中可以看出,该触觉传感器在大压力范围内具有优异的线性。
37.综上所述,基于梯度孔/金字塔一体化结构触觉传感器在大压力范围内具有优异的线性、高灵敏度及快响应时间。其中,宽响应范围、高灵敏度及快响应时间的触觉传感器特性可以赋予人工智能设备在多场景下快速精准感知能力,线性特性的触觉传感器可以大大地简化人工智能设备后期信号处理电路,进而大大简化人工智能装置的传感设备,为轻
型化人工智能设备的制备提供有利条件。
38.对比例
39.为了进一步说明本技术方案的意义,将实施例中的梯度孔/金字塔一体化结构复合导电薄膜换成梯度孔结构复合导电薄膜作为对比例,其它条件均与实施例相同。
40.梯度孔结构聚二甲基硅氧烷聚合物薄膜通过蒸汽法制备,具体的制备方法为:首先,将单体和交联剂以10:1比例混合制备出聚二甲基硅氧烷的预聚物,之后迅速搅拌10min,并将其放入真空干燥箱真空除泡。将已抽真空的聚二甲基硅氧烷预聚物通过旋涂的方式均匀分布在基底模板上,转速为600rpm,时间为60s。然后将基底模板放入高压釜中并将其加热至180℃,在此条件下保温10min。之后,取出基底模板,并剥离获得的梯度孔结构聚二甲基硅氧烷薄膜。之后,将梯度孔结构聚二甲基硅氧烷薄膜裁剪为2cm
×
2cm方形,待用。
41.具体的,传感材料梯度孔结构复合导电薄膜是通过溶胀填充的方式将导电材料碳纳米管均匀分散于梯度孔结构聚二甲基硅氧烷薄膜中制备。具体的制备步骤为:首先将购买的多壁碳纳米管研磨、干燥以使碳纳米管易于分散,之后按3wt.%的配比称量所需材料,通过搅拌、超声将其分散于n-甲基吡咯烷酮,便获得分散均匀的多壁碳纳米管溶液,待用。
42.具体的,将上述制备的梯度孔结构聚合物薄膜放入稀释的n,n-二甲基聚酰胺溶液中,放置25min使其发生溶胀以实现预应变。之后将已溶胀的梯度孔结构聚合物薄膜放入多壁碳纳米管溶液中,经搅拌、超声获得传感材料梯度孔结构复合导电薄膜。
43.具体的,柔性衬底和电极材料采用的是聚对苯二甲酸乙二酯和氧化铟锡,通过电子束蒸镀或热蒸镀将氧化铟锡蒸发至柔性基底聚对苯二甲酸乙二酯形成薄膜电极,电极氧化铟锡厚度为45nm。之后将柔性衬底/电极聚对苯二甲酸乙二酯/氧化铟锡裁剪为2cm
×
3.5cm,待用。
44.具体的,将传感材料梯度孔结构复合导电薄膜放入等离子清洗机中进行氧等离子体处理使其增加亲和性,之后将其层压至上、下柔性衬底/电极聚对苯二甲酸乙二酯/氧化铟锡之间,之后采用厚度为100μm的聚合材料聚酰亚胺进行封装,便制备了基于梯度孔结构的触觉传感器。
45.图6为实施例和对比例制备的触觉传感器相对电流变化量随压力变化的对比图,从图中可以看出,实施例的基于梯度孔/金字塔一体化结构触觉传感器具有非常优异的线性,这是由于金字塔结构的接触电阻响应机制增强了梯度孔结构导电通道响应机制实现的。而对比例基于梯度孔结构触觉传感器呈现出非线性的趋势,这将大大增加后期处理电路设计复杂程度。此外,还可以看出,实施例的基于梯度孔/金字塔一体化结构触觉传感器在大的压力范围(0-600kpa)内具有较好的灵敏度,为20kpa-1
。而对比例的基于梯度孔结构触觉传感器的灵敏度在0-10kpa为0.4kpa-1
,在10-450kpa范围内为0.16 kpa-1
,说明了梯度孔/金字塔一体化结构的引入使触觉传感器灵敏度提高2个数量级。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1