基于双目视觉隧道仰拱变形监测预警方法及其预警系统与流程
1.本发明属于隧道监测的技术领域,具体而言涉及一种基于双目视觉隧道仰拱变形监测预警方法及其预警系统。
背景技术:
2.在高速铁路的设计和建设中难以避免大量的隧道、桥梁工程的建设。受多山地地形限制,隧道建设逐渐向深、大、长方向发展,尤其西部地区,地质条件十分复杂,由于受板块运动影响,断层构造发育,岩体破碎,稳定性差,而且赋存了较高的构造地应力,同时受施工质量及设计因素的影响,隧道的修建将面临仰拱变形、开裂、坍塌等问题。据相关统计,在6256条病害隧道中,由隧道仰拱隆起变形产生的病害隧道有554座,总里程达到了121.41公里,其给工程安全带来严重威胁,且修复需要耗费大量的人力物力,造成严重的经济损失及社会影响。
3.影响隧道仰拱隆起变形的因素主要包括:地下水情况、膨胀性岩土、高地应力及仰拱设计参数等,而造成隧道仰拱隆起变形的原因是多因素耦合作用的结果。为确保隧道建设的稳定性和安全性,防止隧道仰拱变形底鼓等病害的发生,合理的监测手段被用于隧道仰拱,以降低病害带来的损失。目前,常用的监测方法为人力加全站仪、水准仪等,这些监测方法在监测过程中,受外界因素影响较大,存在费时费力的状况。
4.如中国专利申请为201811510096.0提供了一种基于拱顶下沉和周边收敛的隧道监测预警系统及方法,包括第一激光测距装置、第二激光测距装置和预警云平台;第一激光测距装置和第二激光测距装置对称布置于隧道监测断面的左右两侧;第一激光测距装置朝向当前隧道监测断面的拱顶a位置发射红外线,还向第二激光测距装置发射红外线;第二激光测距装置朝向当前隧道监测断面的拱顶a位置发射红外线,还向第一激光测距装置发射红外线;安装角度保持不变。优点为:该发明提供的基于拱顶下沉和周边收敛的隧道监测预警系统及方法,能够简单、方便、实时、准确的测算出隧道拱顶下沉和周边收敛的数值量,进而保证了监测预警系统的可靠性和准确性,因此,可大范围推广使用。但是并没有提出一种基于双目视觉隧道仰拱变形监测预警方法及其预警系统。
5.又如中国专利申请号为202110957905.8公开了一种隧道变形监测光纤测试方法及系统,包括数据传输系统、步距监控测量系统、基坑围土压力监测系统、水压监测系统、视频采集系统,并通过步距监控测量系统、基坑围土压力监测系统、水压监测系统监测的数据信息通过数据传输系统传输给主控制中心,通过主控中心再进行数据分析。将采集的数据与初始设定的阈值(即误差范围内)进行逐一比对,当任一系统所示识别的参数信息超过设定的阈值时,则会发出隧道变形的预警通知,提高了隧道变形识别的监测范围,同时也提高了监测的识别率,更加准确的掌控隧道变形预警情况。但是同样没有提出一种基于双目视觉隧道仰拱变形监测预警方法及其预警系统。
6.现有的监测方法存在效率低等情况,无法实现对隧道仰拱变形的实时监测,工程上亟需一种既能实时监测,又能节省人力物力的监测方法。
(u2,v2);
24.步骤2.2、将p1(u1,v1)和p2(u2,v2)分别代入摄像机理想线性模型获取标志点对应的多个物点坐标,对多个物点坐标采用最小二乘法计算出满足标志点对应的一个物点坐标p(x,y,z),摄像机理想线性模型如下式(4):
[0025][0026]
式中,zc为相机像面到物沿光轴的距离,p为投影矩阵。
[0027]
进一步的,所述投影矩阵按下式(5)获取:
[0028]
p=a[r1,r2,t]
……
(5),
[0029]
式中,[r1,r2,t]表示为相机外参数矩阵。
[0030]
进一步的,步骤3所述ccd双目摄像机将隧道仰拱监测点坐标发送至计算机与预先设定的阈值坐标进行比较判断隧道仰拱变形包括:
[0031]
步骤3.1、ccd双目摄像机将隧道仰拱检测的标志点对应的物点坐标p(x,y,z)发送至计算机;
[0032]
步骤3.2、操作人员在计算机上设置阀值坐标,当物点坐标p(x,y,z)超过阀值坐标时,报警装置报警,否则,对标志点进行实时采集发送至计算机进行监测。
[0033]
本发明另一个目的在于提出了一种基于双目视觉隧道仰拱变形监测预警系统,包括:滑动槽、连接杆、集成盒、无线数据存储传输装置、ccd双目摄像机、红外灯、数据接收装置、计算机、报警装置、电源和电线,其中,隧道侧面中线设置有滑道槽,滑动槽上滑动连接有连接杆,连接杆与集成盒固定连接,集成盒内设置无线数据存储传输装置,集成盒外固定有ccd双目摄像机和红外灯;电源、集成盒、无线数据存储传输装置、ccd双目摄像机和红外灯通过电线电性连接;无线数据存储传输装置通过无线信号方式与数据接收装置进行信号传输,数据接收装置、计算机、报警装置、电源通过电线电性连接。
[0034]
与现有技术相比,本发明具有益效果如下:
[0035]
1、本发明所述基于双目视觉隧道仰拱变形监测预警方法,采用双目视觉技术,无需监测人员到现场标志点进行测量监测,一定程度上解放了人力,节约了工程成本;相对于全站仪等监测方法,具有成本低、效率高、效果好的优势,具有一定的推广价值。
[0036]
2、本发明所述基于双目视觉隧道仰拱变形监测预警方法,本发明通过双目视觉技术,获取标志点的图像,经计算机处理后,可得到标志点的空间坐标,根据前后空间坐标的对比,可获得隧道仰拱的变形量,当变形量超过设定的阈值,报警装置将实现报警,可能够实现隧道仰拱变形量的实时监测。
[0037]
3、本发明所述基于双目视觉隧道仰拱变形监测预警系统,将ccd双目摄像机放置于隧道侧面中线,对仰拱变形监测位置的标志点进行实时监测,通过数据传输、接收装置实现图像的接收、传输,通过计算机平滑处理及相关坐标换算步骤获得标志点的空间坐标。
附图说明
[0038]
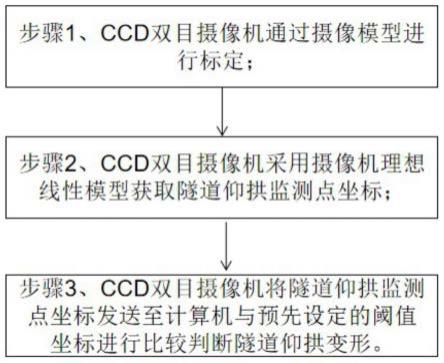
图1为本发明所述基于双目视觉隧道仰拱变形监测预警方法的流程示意图;
[0039]
图2为本发明所述基于双目视觉的隧道仰拱变形监测预警系统的部分结构的立体结构示意图;
[0040]
图3为本发明所述基于双目视觉的隧道仰拱变形监测预警系统的部分结构连接示意图;
[0041]
图4为本发明采用基于双目视觉隧道仰拱变形监测预警方法的监测标志点的示意图;
[0042]
附图标记说明:1-滑动槽,2-连接杆,3-集成盒,4-ccd双目摄像机,5-标志点,6-红外灯,7-数据接收装置,8-计算机,9-报警装置,10-电源,11-电线。
具体实施方式
[0043]
下面结合说明书附图和具体实施方式对本发明进行进一步的详细描述。
[0044]
结合图1-4所述基于双目视觉隧道仰拱变形监测预警方法,包括:
[0045]
步骤1所述ccd双目摄像机4通过摄像模型进行标定包括:
[0046]
步骤1.1、利用ccd双目摄像4机对准一张贴于平板上黑白间距相等的棋盘格作为标定板进行拍照获取摄影图片,通过每张摄影图片和黑白间距相等的棋盘格获取每一张摄影图片对应的物点坐标(x,y,z)和像点坐标(u,v),将物点坐标和像点坐标分别转换为齐次坐标(x,y,z,1)和(u,v,1);
[0047]
步骤1.2、利用投影几何关系建立起物点与像点的对应关系,如下式(1):
[0048][0049]
式中,s为尺度因子,h为单应性矩阵,标定板上物点坐标中高度z取数值为0,则物点与像点的对应关系如下式摄像模型(2)
[0050][0051]
步骤1.3、将物点坐标和像点坐标代入摄像模型获取单一性矩阵,通过单一性矩阵获取每一张摄影图片对应的内参数矩阵和外参数矩阵;
[0052]
步骤1.4、通过获取的每一张摄像图片对应的内参数矩阵、外参数矩阵以及物点坐标获取经过参数校准的像点坐标,利用ccd双目摄像机4获取的像点坐标采用最大似然估计值模型计算最小代数距离,通过最小代数距离确定ccd双目摄像机4最优的内参数矩阵和外参数矩阵,最大似然估计值模型如下式(3):
[0053]
[0054]
式中,m
ij
表示ccd双目摄像机4获取的像点坐标,表示经过参数校准的像点坐标,其中,a表示内参数矩阵,ri表示外参数旋转矩阵,ti表示外参数平移向量,mj表示物点坐标。
[0055]
针对步骤1.1~步骤1.3,这里需要补充的是坐标点(u,v)通过世界坐标系下的一点m(x,y,z)经过相机变化后所得,因为数值z取值为数值0,所以可以根据标定原理表示如公式(2)所示。
[0056]
其中,h=a[r1,r2,t]为单应性矩阵,a为摄像机内参数矩阵,r1,r2为绕坐标点m(x,y,z)的旋转分量。
[0057]
通过cholesky分解获得ccd双目摄像4的内参数矩阵,外参数矩阵可以单应性条件获得。
[0058]
步骤1.4、通过获取的每一张摄像图片对应的内参数矩阵、外参数矩阵以及物点坐标获取经过参数校准的像点坐标,利用ccd双目摄像机4获取的像点坐标采用最大似然估计值模型计算最小代数距离,通过最小代数距离确定ccd双目摄像机4最优的内参数矩阵和外参数矩阵,最大似然估计值模型如下式(3):
[0059][0060]
式中,m
ij
表示ccd双目摄像机4获取的像点坐标,表示经过参数校准的像点坐标,其中,a表示内参数矩阵,ri表示外参数旋转矩阵,ti表示外参数平移向量,mj表示物点坐标。
[0061]
步骤2所述ccd双目摄像机4采用摄像机理想线性模型获取隧道仰拱监测点坐标包括:
[0062]
步骤2.1、校准后的ccd双目摄像机4拍摄标志点获取像点坐标分别为p1(u1,v1)和p2(u2,v2);
[0063]
步骤2.2、将p1(u1,v1)和p2(u2,v2)分别代入摄像机理想线性模型获取标志点对应的多个物点坐标,对多个物点坐标采用最小二乘法计算出满足标志点对应的一个物点坐标p(x,y,z),摄像机理想线性模型如下式(4):
[0064][0065]
式中,zc为相机像面到物沿光轴的距离,p为投影矩阵。
[0066]
进一步的,所述投影矩阵按下式(5)获取:
[0067]
p=a[r1,r2,t]
……
(5),
[0068]
式中,[r1,r2,t]表示为相机外参数矩阵。
[0069]
针对步骤2.1~步骤2.2,这里需要补充的是根据设计图纸来确定隧道仰拱监测点,通过荧光漆在仰拱监测点上设置人工标志点5。还包括监测系统中监测设备及配件安装,其中包括ccd双目摄像机4,红外灯6及无线数据存储传输装置(图中未示出),监测设备
固定在滑动槽1上,滑动槽1固定在隧道侧面中线上。采集的图像通过集成在集成盒3中的无线数据存储传输装置储存。
[0070]
而且公式(4)可表示为世界坐标到图像像素坐标的转化关系如下式(6)所示:
[0071][0072]
其中,zc为相机像面到物沿光轴的距离,u0,v0为像平面中心位置,f为相机的距离,ku,kv分别表示焦距归一化成像平面上成像坐标到图像坐标的放大系数;
[0073]
上式(6)还可以写作下式(7)所示:
[0074][0075]
步骤3所述ccd双目摄像机4将隧道仰拱监测点坐标发送至计算机8与预先设定的阈值坐标进行比较判断隧道仰拱变形包括:
[0076]
步骤3.1、ccd双目摄像机4将隧道仰拱检测的标志点对应的物点坐标p(x,y,z)发送至计算机;
[0077]
步骤3.2、操作人员在计算机8上设置阀值坐标,当物点坐标p(x,y,z)超过阀值坐标时,报警装置9报警,否则,对标志点5进行实时采集发送至计算机8进行监测。
[0078]
针对步骤3.1~步骤3.2,这里需要补充的是红外灯6对标志点5进行补光,便于采集到清晰度图像,数据接收装置7接收现场采集的图像,上传到计算机8中,计算机8借助高斯滤波等算法对图像进行平滑处理,减轻外部环境对图像的影响。
[0079]
本发明提出的另一目的是提出了一种基于双目视觉隧道仰拱变形监测预警系统,包括:滑动槽1、连接杆2、集成盒3、无线数据存储传输装置(图中未示出)、ccd双目摄像机4、红外灯6、数据接收装置7、计算机8、报警装置9、电源10和电线11;隧道侧面中线设置有滑道槽1,滑动槽1上滑动连接有连接杆2,连接杆2与集成盒3固定连接,集成盒3内设置无线数据存储传输装置,集成盒3外固定有ccd双目摄像机4和红外灯6;电源10、集成盒3、无线数据存储传输装置、ccd双目摄像头4和红外灯6通过电线11电性连接;无线数据存储传输装置通过无线信号方式与数据接收装置7进行信号传输,数据接收装置7、计算机8、报警装置9、电源10通过电线11电性连接。
[0080]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的范围内,能够轻易想到的变化或替换,都应涵盖在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1