减少磁性传感器压力的减压轴组件的制作方法
1.总体而言,本公开涉及自动货币系统。更具体地,本公开涉及减少磁性传感器压力的减压轴组件。
背景技术:
2.钞票处理或回收装置可以包括在收银员保险箱、收银员辅助的自动现金处理系统、自助服务终端(如自动售货机器、出票机、复印机、 atm等)中。这些设备中的许多设备包括钞票接受器或验证器,钞票接受器或验证器使用某些类型的传感器来检测钞票的属性以识别钞票或验证钞票的真实性。钞票装置通常具有顾客或用户插入单张钞票或多张钞票的开口、用于将钞票从所述开口传送到传感器、接受器或验证系统和现金储存器的明确限定的钞票路径、用于扫描钞票的所述传感器系统和用于确定插入的钞票是否真实的计算系统、以及钞票储存单元。如果钞票被接受,则将钞票进一步运输到钞票装置中。如果钞票被拒绝,则钞票可以从机器中分配。储存单元可以是现金箱(具有或不具有堆叠机构)、现金袋或盒子。此外,许多钞票装置在将钞票发送到钞票储存单元之前可能具有临时储存或托管。此外,钞票接受器可以具有成堆进给器系统,成堆进给器系统可以允许插入一叠钞票用于连续处理。
3.钞票装置还可以包括磁性传感器,以检测包括在钞票中的用于钞票检测、识别和/或真实性验证的磁性材料。通常,为了使磁性传感器正确地检测或感应在钞票路径中经过传感器附近的钞票,钞票必须与磁性传感器物理接触。一些钞票装置使用诸如驱动轮、刷轮的部件或其他部件来使钞票与磁性传感器接触。然而,这些部件引入了各种问题,例如,由于用过大的力抵靠磁性传感器和/或横跨磁性传感器的整个宽度摩擦或按压而导致磁性传感器磨损或损坏。这些部件还由硬质材料制成,长时间接触会磨损或损坏磁性传感器。
技术实现要素:
4.本公开涉及减少磁性传感器压力的减压轴组件。
5.在其一个方面,钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处。减压轴组件包括:轴,其可用于沿钞票运输路径的运输方向旋转;一个或多个螺旋桨轮,其耦合到该轴且可用于随轴旋转;以及多个直螺旋桨,其从一个或多个螺旋桨轮中的每一个的表面延伸,其中在轴和一个或多个螺旋桨轮的旋转期间,多个直螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器提起。
6.在一些实施例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
7.在一些实施例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
8.在一些实施例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
9.在一些实施例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
10.在一些实施例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分还包括。
11.在一些实施例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
12.在一些实施例中,当多个直螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器提起时,钞票的一部分接触磁性传感器。
13.在一些实施例中,磁性传感器设置在钞票运输路径的宽度上方。
14.在一些实施例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
15.在一些实施例中,多个直螺旋桨由橡胶材料制成。
16.在一些实施例中,多个直螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔,并且多个直螺旋桨中的每一个以直的取向延伸。
17.在一些实施例中,轴还可用于沿钞票运输路径的分配方向旋转。
18.在一些实施例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
19.在一些实施例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。
20.在其另一方面,钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处,减压轴组件包括可用于沿钞票运输路径的运输方向旋转的轴、耦合到轴且可用于随轴旋转的一个或多个螺旋桨轮,以及从一个或多个螺旋桨轮中的每一个的表面延伸的多个对称螺旋桨,其中在轴和一个或多个螺旋桨轮的旋转期间,多个对称螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器提起。
21.在一些实施例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
22.在一些实施例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
23.在一些实施例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
24.在一些实施例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
25.在一些实施例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分。
26.在一些实施例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
27.在一些实施例中,当多个对称螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器提起时,钞票的一部分接触磁性传感器。
28.在一些实施例中,磁性传感器设置在钞票运输路径的宽度上方。
29.在一些实施例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
30.在一些实施例中,多个对称螺旋桨由橡胶材料制成。
31.在一些实施例中,多个对称螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔。
32.在一些实施例中,轴还可用于沿钞票运输路径的分配方向旋转。
33.在一些实施例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
34.在一些实施例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。
35.在其另一方面,钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处,减压轴组件包括可用于沿钞票运输路径的运输方向旋转的轴、耦合到轴且可用于随轴旋转的一个或多个螺旋桨轮,以及从一个或多个螺旋桨轮中的每一个的表面延伸的多个螺旋桨,其中在轴和一个或多个螺旋桨轮的旋转期间,多个螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器提起。
36.在一些实施例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
37.在一些实施例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
38.在一些实施例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
39.在一些实施例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
40.在一些实施例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分。
41.在一些实施例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
42.在一些实施例中,当多个螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器提起时,钞票的一部分接触磁性传感器。
43.在一些实施例中,磁性传感器设置在钞票运输路径的宽度上方。
44.在一些实施例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
45.在一些实施例中,多个螺旋桨由橡胶材料制成。
46.在一些实施例中,多个螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔,并且多个螺旋桨中的每一个以直的取向延伸。
47.在一些实施例中,轴还可用于沿钞票运输送路径的分配方向旋转。
48.在一些实施例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
49.在一些实施例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。
50.在其一个方面,钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处。减压轴组件包括:轴,其可用于沿钞票运输路径的运输方向旋转;一个或多个螺旋桨轮,其耦合到轴且可用于随轴旋转;以及不同长度的多个螺旋桨,其从一个或多个螺旋桨轮中的每一个的表面延伸,其中在轴和一个或多个螺旋桨轮的旋转期间,多个螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器推动。
51.在一些实施例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
52.在一些实施例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
53.在一些实施例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
54.在一些实施例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
55.在一些实施例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分。
56.在一些实施例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
57.在一些实施例中,当多个螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器推动时,钞票的一部分接触磁性传感器。
58.在一些实施例中,磁性传感器设置在钞票运输路径的宽度下方。
59.在一些实施例中,磁性传感器设置在钞票运输路径的宽度上方。
60.在一些实施例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器上方横跨钞票运输路径的宽度间隔。
61.在一些实施例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
62.在一些实施例中,多个螺旋桨由橡胶材料制成。
63.在一些实施例中,多个螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔,并且多个螺旋桨中的每一个以一种取向延伸。
64.在一些实施例中,轴还可用于沿钞票运输路径的分配方向旋转。
65.在一些实施例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
66.在一些实施例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。
67.在进行下面的详细描述之前,阐释本专利文件中通篇使用的某些单词和短语的定义可能是有益的。术语“耦合”及其派生词是指两个或更多元件之间的任何直接或间接通信,无论这些元件彼此是否有物理接触。术语“传输”、“接收”和“通信”及其派生词包含直接通信和间接通信。术语“包括”和“包含”及其派生词指不受限制地包括。术语“或”是包容性的,意味着和/或。短语“与
……
相关联”及其派生词是指“包括”、“包括在其中”、“与
……
相互连接”、“包含”、“包含在其中”、“连接到”或“与
……
连接”、“耦合到”或“与
……
耦合”、“可与
……
通信”、“与
……
合作”、“交错”、“并列”、“与
……
接近”、“结合到”或“与
……
结合”、“具有”、“具有属性”、“具有到
……
的关系”或“与
……
具有关系”等。术语“控制器”指控制至少一个操作的任何设备、系统或其部分。这种控制器可以用硬件、或硬件与软件的组合、和/或固件来实现。与任何特定控制器相关联的功能可以是集中式的或分布式的,无论是本地还是远程。短语“至少一个”,当与项目列表一起使用时,指可以使用列出项目的一个或多个的不同组合,并且可能只需要列表中的一个项目。例如,“a、b和c中的至少一个”包括以下任何一种组合:a、b、c、a和b、a和c、b和c、以及a 和b和c。
68.本专利文件通篇提供了一些其他单词和短语的定义。本领域的普通技术人员应该理解,在许多情况下(如果不是大多数情况下),这些定义适用于这些被定义的单词和短语的先前和未来的使用。
附图说明
69.为了本公开的更全面理解,现结合附图参考以下描述,其中:
70.图1a至图1e示出了根据本公开的各种实施例的钞票接受系统或钞票回收系统的示例;
71.图2a示出了根据本公开的各种实施例的钞票感应系统的立体图;
72.图2b示出了根据本公开的各种实施例的钞票感应系统的前视图;
73.图2c示出了根据本公开的各种实施例的钞票感应系统的俯视图;
74.图2d示出了根据本公开的各种实施例的钞票感应系统的仰视图;
75.图2e示出了根据本公开的各种实施例的钞票感应系统的侧视图;
76.图3a示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的立体图;
77.图3b示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的前视图;
78.图3c示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的俯视图;
79.图3d示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的侧视图;
80.图4a示出了根据本公开的各种实施例的包括钞票的钞票感应系统的立体图;
81.图4b示出了根据本公开的各种实施例的包括钞票的钞票感应系统的前视图;
82.图4c示出了根据本公开的各种实施例的包括钞票的钞票感应系统的俯视图;
83.图4d示出了根据本公开的各种实施例的包括钞票的钞票感应系统的侧视图;
84.图5a示出了根据本公开的各种实施例的减压轴组件的立体图;
85.图5b示出了根据本公开的各种实施例的减压轴组件的侧视图;
86.图6a示出了根据本公开的各种实施例的螺旋桨轮的立体图;
87.图6b示出了根据本公开的各种实施例的螺旋桨轮的前视图;
88.图6c示出了根据本公开的各种实施例的螺旋桨轮的侧视图;
89.图7a示出了根据本公开的各种实施例的包括螺旋桨轮和磁性传感器之间的间隙的钞票感应系统的前视图;
90.图7b示出了根据本公开的各种实施例的包括螺旋桨轮和磁性传感器之间的间隙的钞票感应系统的侧视图;
91.图8a示出了根据本公开的各种实施例的钞票感应系统的立体图;
92.图8b示出了根据本公开的各种实施例的钞票感应系统的前视图;
93.图8c示出了根据本公开的各种实施例的钞票感应系统的俯视图;
94.图8d示出了根据本公开的各种实施例的钞票感应系统的仰视图;
95.图8e示出了根据本公开的各种实施例的钞票感应系统的侧视图;
96.图9a示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的立体图;
97.图9b示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的前视图;
98.图9c示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的俯视图;
99.图9d示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的侧视图;
100.图10a示出了根据本公开的各种实施例的包括钞票的钞票感应系统的立体图;
101.图10b示出了根据本公开的各种实施例的包括钞票的钞票感应系统的前视图;
102.图10c示出了根据本公开的各种实施例的包括钞票的钞票感应系统的俯视图;
103.图10d示出了根据本公开的各种实施例的包括钞票的钞票感应系统的侧视图;
104.图11a示出了根据本公开的各种实施例的减压轴组件的立体图;
105.图11b示出了根据本公开的各种实施例的减压轴组件的侧视图;
106.图12a示出了根据本公开的各种实施例的螺旋桨轮的立体图;
107.图12b示出了根据本公开的各种实施例的螺旋桨轮的前视图;
108.图12c示出了根据本公开的各种实施例的螺旋桨轮的侧视图;
109.图13a示出了根据本公开的各种实施例的包括螺旋桨轮和磁性传感器之间的间隙的钞票感应系统的前视图;
110.图13b示出了根据本公开的各种实施例的包括螺旋桨轮和磁性传感器之间的间隙的钞票感应系统的侧视图;
111.图14a示出了根据本公开的各种实施例的钞票感应系统的立体图;
112.图14b示出了根据本公开的各种实施例的钞票感应系统的前视图;
113.图14c示出了根据本公开的各种实施例的钞票感应系统的俯视图;
114.图14d示出了根据本公开的各种实施例的钞票感应系统的仰视图;
115.图14e示出了根据本公开的各种实施例的钞票感应系统的侧视图;
116.图15a示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的立体图;
117.图15b示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的前视图;
118.图15c示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的俯视图;
119.图15d示出了根据本公开的各种实施例的磁性传感器不可视的钞票感应系统的侧视图;
120.图16a示出了根据本公开的各种实施例的减压轴组件的立体图;
121.图16b示出了根据本公开的各种实施例的减压轴组件的侧视图;
122.图17a示出了根据本公开的各种实施例的螺旋桨轮的立体图;
123.图17b示出了根据本公开的各种实施例的螺旋桨轮的前视图;
124.图17c示出了根据本公开的各种实施例的螺旋桨轮的侧视图;
125.图18a示出了根据本公开的各种实施例的钞票感应系统的立体图;
126.图18b示出了根据本公开的各种实施例的钞票感应系统的侧视图;
127.图19示出了根据本公开的各种实施例的电子系统的示例;以及
128.图20示出了根据本公开的各种实施例的电子系统的另一个示例。
具体实施方式
129.下面讨论的图1a至图20,以及在本专利文件中用于描述本公开的原理的各种实施例,仅作为说明,而不应该以任何方式解释为限制本公开的范围。本领域技术人员应该理解,本公开的原理可以在任何适当布置的设备或系统中实施。
130.如本说明书中通篇使用的,术语货币面额、货币的面额、有价文件、货币票据、票据(bill)、钞票、纸币(note)、支票、银行支票、纸币(paper money)、纸货币、塑料币、塑料钞票、塑料货币、汇票、优惠券、票和现金可以在本文中互换使用,来指一种可转让票据 (instrument)或任何其他证明金钱债务支付权的文书,其通常由中央银行当局发行。
131.图1a至图1e示出了根据本公开的各种实施例的钞票接受系统或钞票回收系统110-150的示例。钞票回收系统110-150可以包括挡板、底盘、接受器头、钞票运输机构、钞票运输路径、用于验证插入的钞票的真实性的一个或多个传感器、钞票储存区段和/或钞票接受器-分配器模块。图1a示出了根据本公开的各种实施例的钞票接受系统110 的示例。图1b示出了根据本公开的各种实施例的钞票回收系统120 的示例。图1c示出了根据本公开的各种实施例的钞票回收系统130 的示例。图1d示出了根据本公开的各种实施例的钞票回收系统140 的示例。图1e示出了根据本公开的各种实施例的钞票回收系统150 的示例。如图1a至图1e中描述的任何钞票回收系统110-150也可以用于或结合在其他系统中,例如,无人值守支付系统、销售点系统或其他货币处理装置中。
132.图1a示出了钞票接受系统110,该钞票接受系统110配置成验证插入的钞票的真实性。钞票接受系统110通常具有接受器头、钞票运输系统和可移除的钞票储存单元。通常使
用各种传感器在钞票接受模块中验证插入的钞票的真实性。一旦钞票被认为是真实的并且被认为是可接受的,就会使用钞票运输系统将钞票进一步运输到钞票接受器中,进入可移除的钞票储存单元。
133.图1b示出了根据本公开的各种实施例的钞票回收系统120。除了如图1a中示出的钞票接受模块、钞票运输系统和可移除的钞票储存单元外,图1b示出的钞票回收系统120还包括钞票回收模块,钞票回收模块使该单元将钞票提供回给顾客。例如,钞票回收系统120可用于自动支付系统,其中顾客出示高面额钞票购买商品或服务,该高面额钞票的价值高于所购买的商品或服务的价值,并且该单元提供较低面额钞票,以向顾客提供找零以辅助完成交易。回收模块可以作为托管单元,该托管单元保持被接受的文件直到交易完成。
134.图1c示出了根据本公开的各种实施例的钞票回收系统130。钞票回收系统130包括钞票接受模块、钞票运输系统和可移除的钞票储存单元、托管模块和使该单元将钞票提供回给顾客的多个钞票回收模块。例如,钞票回收系统130可用于自动支付系统,其中顾客出示高面额钞票购买商品或服务,该高面额钞票的价值高于所购买的商品或服务的价值,并且该单元提供较低面额钞票,以向顾客提供找零以辅助完成交易。托管单元保持被接受的文件直到交易完成。
135.图1d示出了根据本公开的各种实施例的钞票回收系统140。钞票回收系统140包括钞票接受模块、钞票运输系统和可移除的钞票储存单元以及使该单元将钞票提供回给顾客的多个钞票回收模块。例如,钞票回收系统140可用于自动支付系统,其中顾客出示高面额钞票购买商品或服务,该高面额钞票的价值高于所购买的商品或服务的价值,并且该单元提供较低面额钞票,以向顾客提供找零以辅助完成交易。回收模块可以作为托管单元,该托管单元保持被接受的文件直到交易完成。
136.图1e示出了根据本公开的各种实施例的钞票回收系统150的示意图。钞票回收系统150包括钞票接受头或钞票接受模块102、钞票感应模块104、钞票运输系统和可移除的钞票储存单元106、托管模块108 和使该单元将钞票提供回给顾客的多个钞票回收模块112。例如,钞票回收系统150可用于自动支付系统,其中顾客出示高面额钞票购买商品或服务,该高面额钞票的价值高于所购买的商品或服务的价值,并且该单元提供较低面额钞票,以向顾客提供找零以辅助完成交易。托管单元108保持被接受的文件直到交易完成。
137.尽管图1a示出了钞票接受系统的示例并且图1b至图1e示出了货币回收系统的各种示例,但是可以对图1a至图1e进行各种改变。图1a中的钞票接受系统或图1b至图1e中的货币回收系统的各种部件可以被重新布置、省略、组合或进一步细分,并且可以根据特定需要添加额外的部件。例如,货币回收系统120-150可以包括任何数量的托管模块、储存模块或回收模块。货币回收系统120-150可用于自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他自助服务机器(kiosk)。通常,钞票接受系统和货币回收系统可以有各种各样的配置,并且图1a至图1e不将本公开的范围限制到任何特定配置。
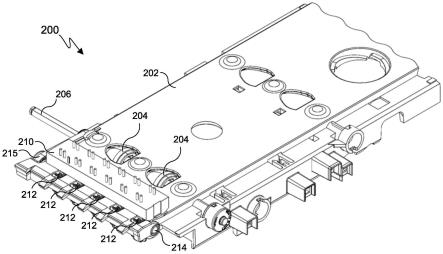
138.图2a至图2e示出了根据本公开的各种实施例的钞票感应系统 200的各种视图。图2a示出了根据本公开的各种实施例的钞票感应系统200的立体图。图2b示出了根据本公开的各种实施例的钞票感应系统200的前视图。图2c示出了根据本公开的各种实施例的钞票感应系统200的俯视图。图2d示出了根据本公开的各种实施例的钞票感应系统200的仰视
图。图2e示出了根据本公开的各种实施例的钞票感应系统200的侧视图。钞票感应系统200可以被包括在钞票接受系统110 或钞票回收系统120-150中或成为钞票接受系统110或钞票回收系统 120-150的一部分,例如,在这种钞票回收系统的钞票感应模块中,或在其他货币装置中。应该理解的是,图2a至图2e中示出的钞票感应系统200被示出为货币装置的钞票运输路径的一部分,例如,钞票运输路径在本文描述的钞票感应模块内的一部分。
139.钞票感应系统200包括根据本公开的各种实施例的磁性传感器 210。在一些实施例中,磁性传感器可以是磁阻头,磁阻头在磁性传感器的中心部分具有矩形区域,用于在一个通道中读取。在一些实施例中,磁性传感器是磁阻传感器,磁阻传感器包括平坦的感应表面并且可以在多个通道中读取,例如,2个至10个通道。磁性传感器用于钞票处理装置中以检测包括在钞票中的用于钞票检测、识别和/或真实性验证的磁性材料。在一些实施例中,为了使磁性传感器正确地检测或感应在钞票路径中经过传感器附近的钞票,钞票与磁性传感器物理接触。在其他实施例中,磁性传感器可以检测靠近磁性传感器的钞票,而无需钞票物理地接触磁性传感器。如本文所述,钞票装置中用于使钞票与磁性传感器接触的其他部件引入了各种问题,例如,由于用过大的力抵靠磁性传感器摩擦或按压而导致磁性传感器磨损或损坏,或由可能磨损或损坏磁性传感器的硬质材料制成。磁性传感器210可以通信地连接到处理器或其他系统部件,例如,图19和图20中示出的。
140.图3a至图3d示出了根据本公开的各种实施例的没有磁性传感器 210的钞票感应系统200的各种视图。图3a示出了根据本公开的各种实施例的没有磁性传感器210的钞票感应系统200的立体图。图3b示出了根据本公开的各种实施例的没有磁性传感器210的钞票感应系统 200的前视图。图3c示出了根据本公开的各种实施例的没有磁性传感器210的钞票感应系统200的俯视图。图3d示出了根据本公开的各种实施例的没有磁性传感器210的钞票感应系统200的侧视图。应该理解的是,图3a至图3d示出的钞票感应系统200与图2a至图2e示出的钞票感应系统200相同,其中移除了磁性传感器210以辅助钞票感应系统200的某些其他部件的视觉识别。
141.参考图2a至图2e和图3a至图3d,钞票感应系统200包括钞票路径板202,钞票路径板202形成钞票运输路径的一部分。在一些实施例中,钞票路径板202是钞票路径的底板,其中上钞票路径板(未示出)与钞票路径板202耦合、可移除地耦合或可旋转地耦合,为钞票路径提供封闭区域,并且还为磁性传感器210提供耦合表面,使得磁性传感器210耦合到该上板。钞票路径板202包括一个或多个切口或孔,一个或多个驱动轮或驱动辊204穿过该一个或多个切口或孔设置。驱动辊204耦合到驱动轴206,其中驱动轴206在钞票路径板202下方延伸穿过驱动辊204中的每一个的中心部分。一个或多个光学传感器 (未示出)也可以安装在钞票路径板202中。在一些实施例中,光学传感器安装在磁性传感器210之后的钞票路径的一部分中。在本公开的各种实施例中,安装的光学传感器可以包括可见光传感器、红外(ir) 光传感器和/或紫外线(uv)光传感器。光学传感器可以通信地连接到处理器或其他系统部件,例如,在图19和图20中示出的。在本公开的各种实施例中,光学传感器安装在磁性传感器210的上游。
142.如图2a所示,例如,钞票路径板202可以在钞票运输路径的钞票运输方向上在驱动辊204之前包括额外的孔,例如,用于包括额外的驱动辊或空转器辊的孔。在一些实施例中,上钞票路径板(未示出) 还可以包括与钞票路径板202的孔相对设置的类似孔,以设置上驱
动辊和/或空转器辊。在一些实施例中,上钞票路径板不包括额外的辊,这可以降低钞票堵塞的可能性。在一些实施例中,额外的光学传感器也可以被包括在钞票路径中的其他地方,例如,在驱动辊204之前的钞票路径的一部分中的额外的孔附近。
143.钞票感应系统200还包括一个或多个螺旋桨轮212,每个螺旋桨轮 212包括多个螺旋桨,这些螺旋桨围绕螺旋桨轮212的外圆周等距间隔,并且从螺旋桨轮212的外圆周延伸一距离。一个或多个螺旋桨轮 212耦合到螺旋桨轴214,其中螺旋桨轴214延伸穿过螺旋桨轮212中的每一个的中心部分。螺旋桨轮212设置在钞票路径板202的孔中,其中根据当前的旋转阶段,每个螺旋桨轮212的一部分和相关联的螺旋桨部分地在钞票路径板202下方延伸,并且每个螺旋桨轮212的另一个部分和相关联的螺旋桨部分地在钞票路径板202上方延伸。圆柱形头213也耦合到螺旋桨轴214,该圆柱形头213可用于耦合到驱动皮带215。在一些实施例中,圆柱形头213包括平坦的圆形表面,平坦的驱动皮带围绕该平坦的圆形表面紧密耦合。在一些实施例中,例如,在图2b和图3b中示出的,圆柱形头包括多个齿217,多个齿217与驱动皮带215的脊啮合。例如,如在图2c、图2e、图3c和图3d中示出的,驱动皮带215也耦合到驱动轴206,例如,类似地耦合到与驱动轴206附接的另一个圆柱形头。
144.在一些实施例中,包括在钞票处理装置中的马达(未示出)驱动驱动轴206以使驱动辊204旋转,其中驱动皮带215将扭矩传递到螺旋桨轴214以也使螺旋桨轮212旋转。在一些实施例中,马达驱动单独的驱动头207,该驱动头207以与驱动轴206和螺旋桨轴214的圆柱形头类似的方式耦合到驱动皮带215,但是如图2e和图3d中示出的来定位,使得驱动皮带215相对于驱动头207升高,从而在驱动皮带 215上提供增加的张力。随着驱动头207旋转,驱动皮带215移动,驱动皮带215旋转并且将扭矩传递到驱动轴206和螺旋桨轴214两者,进而也使驱动辊204和螺旋桨轮212旋转。
145.图4a至图4d示出了根据本公开的各种实施例的包括钞票402的钞票感应系统200的各种视图。图4a示出了根据本公开的各种实施例的包括钞票402的钞票感应系统200的立体图。图4b示出了根据本公开的各种实施例的包括钞票402的钞票感应系统200的前视图。图4c 示出了根据本公开的各种实施例的包括钞票402的钞票感应系统200 的俯视图。图4d示出了根据本公开的各种实施例的包括钞票402的钞票感应系统200的侧视图。应该理解的是,图4a至图4d示出的钞票感应系统200与图2a至图2e示出的钞票感应系统200相同。
146.如图4a至图4d示出,钞票402由驱动辊204沿钞票运输路径运输。当钞票402的最前边到达一个或多个螺旋桨轮212时,钞票402 的一部分由螺旋桨轮212的螺旋桨从钞票路径板202提起,使钞票402 与磁性传感器210接触,钞票被提起的部分被按压在螺旋桨轮212的一个或多个螺旋桨和磁性传感器210的感应表面之间。随着螺旋桨轮212将钞票402提起以与磁性传感器210接触,驱动轴206和螺旋桨轴 214继续旋转以进一步沿运输路径运输钞票402,使得钞票402的不同部分也接触螺旋桨轮212从而被提起,以接触磁性传感器210,直到钞票402完全通过磁性传感器210。由钞票的磁性传感器210提供的读取可以与其他系统部件通信,例如图19和图20中示出的系统部件,以执行钞票检测、识别、真实性验证等。
147.在一些实施例中,耦合到螺旋桨轴214的螺旋桨轮212的数量可以确定为确保钞票402的大约整个宽度被提起以接触磁性传感器210 的数量,例如,图4a至图4d示出的四个或五个螺旋桨轮。在一些实施例中,根据钞票感应系统200的配置,可以将其他数量的螺旋桨轮 212耦合到螺旋桨轴214。例如,如果预期要由钞票感应系统200处理的钞票仅在钞票的
中心部分包括磁性材料,则可以将一个到三个螺旋桨轮212在钞票运输路径的中心部分耦合到螺旋桨轴214,以仅将钞票的中心部分提起到磁性传感器210。还应该理解的是,在不脱离本公开的范围的情况下,根据钞票感应系统200的配置,可以使用每个螺旋桨轮212的任何数量的螺旋桨。
148.螺旋桨轮212使螺旋桨轴214安装在钞票路径中与驱动轴206相同的竖直位置,由于延伸穿过钞票路径板的孔的螺旋桨中的每一个的长度将钞票提起到接触磁性传感器210的距离,避免了必须调整轴和磁性传感器210之间的距离。因此,磁性传感器可以与螺旋桨轮212 和螺旋桨轴214一起安装在钞票感应系统中,而无需对钞票感应系统进行实质重新配置,例如,调整驱动轴和磁性传感器之间的距离。
149.在一些实施例中,螺旋桨轮212中的每一个的螺旋桨由诸如橡胶的非硬质材料制成,而不是由金属、塑料或其他更硬的材料制成。与其他材料相比,螺旋桨材料的柔软性和低刚度显著减少或消除了对磁性传感器210的磨损和/或损坏。此外,由于螺旋桨仅在磁性传感器210 上的某些点处接触磁性传感器210,例如,图4d中所示的两个点,因此与诸如标准圆形表面驱动轮或刷轮的其他轮类型相比,大大减少了螺旋桨与磁性传感器之间的接触的量,进一步减少或消除了对磁性传感器210的磨损和/或损坏。
150.尽管图2a至图4d示出了钞票感应系统的各种视图,但是可以对图2a至图4d进行各种改变。钞票感应系统200的各种部件可以被重新布置、省略、组合或进一步细分,并且可以根据特定需要添加额外的部件。例如,钞票感应系统200可以包括任何数量的驱动轮、光学传感器或螺旋桨轮。此外,除了使用驱动皮带215之外,可以使用其他方法驱动轴206和轴214,例如,将一个或多个马达直接耦合到轴 206和轴214以使轴206和轴214旋转。钞票感应系统200可用于本文公开的货币回收系统110-150,以及自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他自助服务机器。通常,钞票感应系统200可以有各种各样的配置,并且图2a至图4d 不将本公开的范围限制到任何特定配置。
151.图5a和图5b示出了根据本公开的各种实施例的减压轴组件500。图5a示出了根据本公开的各种实施例的减压轴组件500的立体图。图 5b示出了根据本公开的各种实施例的减压轴组件500的侧视图。
152.如图5a和图5b所示,减压轴组件500包括螺旋桨轮212,螺旋桨轮212耦合到螺旋桨轴214,如参照图2a至图4d所述。每个螺旋桨轮212包括多个螺旋桨211。在一些实施例中,多个螺旋桨211围绕螺旋桨轮212的外圆周等距间隔,并且从螺旋桨轮212的外圆周延伸一距离。螺旋桨211的长度由,当螺旋桨211处于相对于磁性传感器的感应表面旋转的最高点或接近最高点时,螺旋桨轮212的外圆周与磁性传感器210的感应表面之间的距离来限定。也就是说,每个螺旋桨211的长度使得螺旋桨211在其旋转时在一个或多个点处接触磁性传感器210的感应表面,而不会过度抵靠磁性传感器210按压,并且限制了与磁性传感器210接触的量。螺旋桨轴214延伸穿过螺旋桨轮 212中的每一个的中心部分。圆柱形头213也耦合到螺旋桨轴214,圆柱形头213包括齿217,可用于耦合到驱动皮带215,如关于图2a至图4d描述的。
153.在一些实施例中,马达(未示出)使驱动皮带旋转螺旋桨轴214 的圆柱形头213。在一些实施例中,随着螺旋桨轴214旋转,螺旋桨轮 212和螺旋桨211旋转以提起钞票,以接触磁性传感器,例如磁性传感器210。在一些实施例中,螺旋桨轮212中的每一个的螺旋桨211
由诸如橡胶的非硬质材料制成,而不是由金属、塑料或其他更硬的材料制成。与其他材料相比,螺旋桨211的材料的柔软性和低刚度显著减少或消除了对磁性传感器210的磨损和/或损坏。此外,由于螺旋桨211 仅在磁性传感器210上的某些点处接触磁性传感器210,例如,图4d 中所示的两个点,因此与诸如标准圆形表面驱动轮或刷轮的其他轮类型相比,大大减少了螺旋桨与磁性传感器之间的接触的量,进一步减少或消除了对磁性传感器210的磨损和/或损坏。
154.尽管图5a和图5b示出了减压轴组件的各种视图,但是可以对图 5a和图5b进行各种改变。减压轴组件500的各种部件可以被重新布置、省略、组合或进一步细分,并且可以根据特定需要添加额外的部件。例如,减压轴组件500可以包括任何数量的螺旋桨轮212和/或螺旋桨211。在一些实施例中,圆柱形头213可以包括平坦的圆形表面,平坦的驱动皮带围绕该平坦的圆形表面紧密耦合。此外,除了使用驱动皮带之外,可以使用其他方法驱动螺旋桨轴214,例如,将一个或多个马达直接耦合到螺旋桨轴214以使螺旋桨轴214和螺旋桨轮212 旋转。减压轴组件500可用于本文公开的货币回收系统110-150和钞票感应系统200,以及自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他信息自助服务机器。
155.图6a至图6c示出了根据本公开的各种实施例的螺旋桨轮212的各种视图。图6a示出了根据本公开的各种实施例的螺旋桨轮212的立体图。图6b示出了根据本公开的各种实施例的螺旋桨轮212的前视图。图6c示出了根据本公开的各种实施例的螺旋桨轮212的侧视图。
156.如参照图5a和图5b所述,螺旋桨轮212是减压轴组件500的一部分,并且螺旋桨轮212包括多个螺旋桨211。如图6a至图6c所示,在一些实施例中,多个螺旋桨211围绕螺旋桨轮212的外圆周等距间隔,并且从螺旋桨轮212的外圆周延伸一距离。螺旋桨211的延伸长度由,当螺旋桨211处于相对于磁性传感器的感应表面旋转的最高点或接近最高点时,螺旋桨轮212的外圆周与磁性传感器210的感应表面之间的距离来限定。也就是说,每个螺旋桨211的长度使得螺旋桨 211在其旋转时在某一点处接触磁性传感器210的感应表面,而不会过度抵靠磁性传感器210按压。
157.在一些实施例中,螺旋桨轮212的螺旋桨211由诸如橡胶的非硬质材料制成,而不是由金属、塑料或其他更硬的材料制成。与其他材料相比,螺旋桨211的材料的柔软性和低刚度显著减少或消除了对磁性传感器210的磨损和/或损坏。此外,由于螺旋桨211仅在磁性传感器210上的某些点处接触磁性传感器210,例如,图4d中所示的两个点,因此与诸如标准圆形表面驱动轮或刷轮的其他轮类型相比,大大减少了螺旋桨与磁性传感器之间的接触的量,进一步减少或消除了对磁性传感器210的磨损和/或损坏。
158.如图所示,螺旋桨211以直的或对称的取向设置。这使螺旋桨轮 212在任一方向上旋转,使得钞票可以被进一步运输到钞票运输路径中或运输出钞票运输路径。例如,如果螺旋桨211处于弯曲取向或不对称取向,例如在运输方向上弯曲,例如在进一步进入钞票运输路径的方向上弯曲,则螺旋桨211将阻碍系统沿相反方向朝钞票路径入口运输钞票的能力。如果试图反转钞票运输方向,不对称的螺旋桨还可能使钞票堵塞。相反,由于螺旋桨211是对称的,螺旋桨211使钞票沿钞票运输路径在任一方向上双向运输,例如,如果被拒绝的钞票要被运输回钞票路径入口并且分配。
159.在一些实施例中,如图6a至图6c示出,螺旋桨轮212包括孔602,轴,例如螺旋桨轴214,插入穿过该孔602。孔602包括平坦的或基本平坦的表面604。平坦的表面604提供螺旋桨轮212和轴之间的增加的表面接触,从而增加了螺旋桨轮212的扭矩。
160.尽管图6a至图6c示出了螺旋桨轮的各种视图,但是可以对图6a 至图6c进行各种改变。螺旋桨轮212的各种部件可以被重新布置、省略、组合或进一步细分,并且可以根据特定需要添加额外的部件。例如,根据特定需要,螺旋桨轮212可以包括任何数量的螺旋桨211,并且螺旋桨211可以围绕螺旋桨轮212的圆周不同间距地间隔。此外,可以省略平坦的表面604,使孔602是完全圆形的。螺旋桨轮212可用于本文公开的货币回收系统110-150和钞票感应系统200,以及自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他自助服务机器。
161.图7a示出了根据本公开的各种实施例的包括螺旋桨轮212和磁性传感器210之间的间隙702的钞票感应系统200的前视图。图7b示出了根据本公开的各种实施例的包括螺旋桨轮212和磁性传感器210之间的间隙702的钞票感应系统200的侧视图。应该理解的是,图7a和图7b示出的钞票感应系统200与图2a至图2e示出的钞票感应系统 200相同,例如除了包括螺旋桨轮212和磁性传感器210之间的间隙 702之外。
162.在这种实施例中,当钞票进入距磁性传感器的感应表面的预定距离内时,磁性传感器210能够检测钞票中的磁性材料,而螺旋桨轮212 的螺旋桨211不接触磁性传感器210。因此,磁性传感器210可以,在与螺旋桨轮212相距由间隙702限定的距离处,安装在钞票路径板202 上方的部件中,例如上路径板中。当钞票到达螺旋桨轮212时,螺旋桨轮212的螺旋桨211将钞票与螺旋桨211接触的部分朝磁性传感器 210提起到间隙702内,使得磁性传感器210可以在螺旋桨211不与钞票物理接触的情况下检测钞票。在一些实施例中,间隙702的高度对应于单张钞票的厚度。在一些实施例中,间隙702可以小于钞票的厚度。可以调整间隙702以容纳不同的货币厚度。通常,一张钞票的厚度约为100微米,其中公差约为正负20微米。
163.如图8a所示,例如,钞票路径板808可以在钞票运输路径的钞票运输方向上在驱动辊804之前包括额外的孔,例如,用于包括额外的驱动辊或空转器辊的孔。在一些实施例中,上钞票路径板(未示出) 还可以包括与钞票路径板808的孔相对设置的类似孔,以设置上驱动辊和/或空转器辊。在一些实施例中,上钞票路径板不包括额外的辊,这可以降低钞票堵塞的可能性。在一些实施例中,额外的光学传感器也可以被包括在钞票路径中的其他地方,例如,在驱动辊804之前的钞票路径的一部分中的额外的孔附近。
164.钞票感应系统800还包括一个或多个螺旋桨轮812,每个螺旋桨轮 812包括多个螺旋桨,这些螺旋桨围绕螺旋桨轮812的外圆周等距间隔,并且从螺旋桨轮812的外圆周延伸一距离。一个或多个螺旋桨轮 812耦合到螺旋桨轴814,其中螺旋桨轴814延伸穿过螺旋桨轮812中的每一个的中心部分。螺旋桨轮812设置在钞票路径板808的孔中,其中根据当前的旋转阶段,每个螺旋桨轮812的一部分和相关联的螺旋桨部分地在钞票路径板808下方延伸,并且每个螺旋桨轮812的另一个部分和相关联的螺旋桨部分地在钞票路径板808上方延伸。圆柱形头813也耦合到螺旋桨轴814,该圆柱形头813可用于耦合到驱动皮带815。在一些实施例中,圆柱形头813包括平坦的圆形表面,平坦的驱动皮带围绕该平坦的圆形表面紧密耦合。在一些实施例中,例如,在图8b和图9b中示出的,圆柱形头包括多个齿817,多个齿817
与驱动皮带815的脊啮合。例如,如在图8c、图8e、图9c和图9d中示出的,驱动皮带815也耦合到驱动轴806,例如,类似地耦合到与驱动轴806附接的另一个圆柱形头。
165.在一些实施例中,包括在钞票处理装置中的马达(未示出)驱动驱动轴806以使驱动辊804旋转,其中驱动皮带815将扭矩传递到螺旋桨轴814以也使螺旋桨轮812旋转。在一些实施例中,马达驱动单独的驱动头817,该驱动头817以与驱动轴806和螺旋桨轴814的圆柱形头类似的方式耦合到驱动皮带815,但是如图8e和图9d中示出的来定位,使得驱动皮带815相对于驱动头817升高,从而在驱动皮带 815上提供增加的张力。随着驱动头817旋转,驱动皮带815移动,驱动皮带815旋转并且将扭矩传递到驱动轴806和螺旋桨轴814两者,进而也使驱动辊804和螺旋桨轮812旋转。
166.图10a至图10d示出了根据本公开的各种实施例的包括钞票408 的钞票感应系统800的各种视图。图10a示出了根据本公开的各种实施例的包括钞票1002的钞票感应系统800的立体图。图10b示出了根据本公开的各种实施例的包括钞票1002的钞票感应系统800的前视图。图10c示出了根据本公开的各种实施例的包括钞票1002的钞票感应系统800的俯视图。图10d示出了根据本公开的各种实施例的包括钞票1002的钞票感应系统800的侧视图。应该理解的是,图10a至图 10d示出的钞票感应系统800与图8a至图8e示出的钞票感应系统800 相同。
167.如图10a至图10d示出,钞票1002由驱动辊804沿钞票运输路径运输。当钞票1002的最前边到达一个或多个螺旋桨轮812时,钞票 1002的一部分由螺旋桨轮812的螺旋桨从钞票路径板802提起,使钞票1002与磁性传感器810接触,钞票被提起的部分被按压在螺旋桨轮 812的一个或多个螺旋桨和磁性传感器810的感应表面之间。随着螺旋桨轮812将钞票1002提起以与磁性传感器810接触,驱动轴806和螺旋桨轴814继续旋转以进一步沿运输路径运输钞票1002,使得钞票 1002的不同部分也接触螺旋桨轮812从而被提起,以接触磁性传感器 810,直到钞票1002完全通过磁性传感器810。由钞票的磁性传感器 810提供的读取可以与其他系统部件通信,例如图19和图20中示出的系统部件,以执行钞票检测、识别、真实性验证等。
168.在一些实施例中,耦合到螺旋桨轴814的螺旋桨轮812的数量可以确定为确保钞票402的大约整个宽度被提起以接触磁性传感器810 的数量,例如,图10a至图10d示出的四个或五个螺旋桨轮。在一些实施例中,根据钞票感应系统800的配置,可以将其他数量的螺旋桨轮812耦合到螺旋桨轴814。例如,如果预期要由钞票感应系统800 处理的钞票仅在钞票的中心部分包括磁性材料,则可以将一个到三个螺旋桨轮812在钞票运输路径的中心部分耦合到螺旋桨轴814,以仅将钞票的中心部分提起到磁性传感器810。还应该理解的是,在不脱离本公开的范围的情况下,根据钞票感应系统800的配置,可以使用每个螺旋桨轮812的任何数量的螺旋桨。
169.螺旋桨轮812使螺旋桨轴814安装在钞票路径中与驱动轴806相同的竖直位置,由于延伸穿过钞票路径板的孔的螺旋桨中的每一个的长度将钞票提起到接触磁性传感器810的距离,避免了必须调整轴和磁性传感器810之间的距离。因此,磁性传感器可以与螺旋桨轮812 和螺旋桨轴814一起安装在钞票感应系统中,而无需对钞票感应系统进行实质重新配置,例如,调整驱动轴和磁性传感器之间的距离。
170.在一些实施例中,螺旋桨轮812中的每一个的螺旋桨由诸如橡胶的非硬质材料制
成,而不是由金属、塑料或其他更硬的材料制成。与其他材料相比,螺旋桨材料的柔软性和低刚度显著减少或消除了对磁性传感器810的磨损和/或损坏。此外,由于螺旋桨仅在磁性传感器810 上的某些点处接触磁性传感器810,例如,图10d中所示的两个点,因此与诸如标准圆形表面驱动轮或刷轮的其他轮类型相比,大大减少了螺旋桨与磁性传感器之间的接触的量,进一步减少或消除了对磁性传感器810的磨损和/或损坏。
171.尽管图8a至图10d示出了钞票感应系统的各种视图,但是可以对图8a至图10d进行各种改变。钞票感应系统800的各种部件可以被重新布置、省略、组合或进一步细分,并且可以根据特定需要添加额外的部件。例如,钞票感应系统800可以包括任何数量的驱动轮、光学传感器或螺旋桨轮。此外,除了使用驱动皮带815之外,可以使用其他方法驱动轴806和轴814,例如,将一个或多个马达直接耦合到轴806和轴814以使轴806和轴814旋转。钞票感应系统800可用于本文公开的货币回收系统110-150,以及自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他自助服务机器。通常,钞票感应系统800可以有各种各样的配置,并且图8a至图 10d不将本公开的范围限制到任何特定配置。
172.图11a和图11b示出了根据本公开的各种实施例的减压轴组件 1100。图11a示出了根据本公开的各种实施例的减压轴组件1100的立体图。图11b示出了根据本公开的各种实施例的减压轴组件1100的侧视图。
173.如图11a和图11b所示,减压轴组件1100包括螺旋桨轮812,螺旋桨轮812耦合到螺旋桨轴814,如参照图8a至图10d所述。每个螺旋桨轮812包括多个螺旋桨811。在一些实施例中,多个螺旋桨811 围绕螺旋桨轮812的外圆周等距间隔,并且从螺旋桨轮812的外圆周延伸一距离。螺旋桨811的长度由,当螺旋桨811处于相对于磁性传感器的感应表面旋转的最高点或接近最高点时,螺旋桨轮812的外圆周与磁性传感器810的感应表面之间的距离来限定。也就是说,每个螺旋桨811的长度使得螺旋桨811在其旋转时在一个或多个点处接触磁性传感器810的感应表面,而不会过度抵靠磁性传感器810按压,并且限制了与磁性传感器810接触的量。螺旋桨轴814延伸穿过螺旋桨轮812中的每一个的中心部分。圆柱形头813也耦合到螺旋桨轴814,圆柱形头813包括齿817,可用于耦合到驱动皮带815,如关于图8a 至图10d描述的。
174.在一些实施例中,马达(未示出)使驱动皮带旋转螺旋桨轴814 的圆柱形头813。在一些实施例中,随着螺旋桨轴814旋转,螺旋桨轮 812和螺旋桨811旋转以提起钞票,以接触磁性传感器,例如磁性传感器810。在一些实施例中,螺旋桨轮812中的每一个的螺旋桨811由诸如橡胶的非硬质材料制成,而不是由金属、塑料或其他更硬的材料制成。与其他材料相比,螺旋桨811的材料的柔软性和低刚度显著减少或消除了对磁性传感器810的磨损和/或损坏。此外,由于螺旋桨811 仅在磁性传感器810上的某些点处接触磁性传感器810,例如,图10d 中所示的两个点,因此与诸如标准圆形表面驱动轮或刷轮的其他轮类型相比,大大减少了螺旋桨与磁性传感器之间的接触的量,进一步减少或消除了对磁性传感器810的磨损和/或损坏。
175.尽管图11a和图11b示出了减压轴组件的各种视图,但是可以对图11a和图11b进行各种改变。减压轴组件1100的各种部件可以被重新布置、省略、组合或进一步细分,并且可以根据特定需要添加额外的部件。例如,减压轴组件1100可以包括任何数量的螺旋桨轮812和 /或螺旋桨811。在一些实施例中,圆柱形头813可以包括平坦的圆形表面,平坦的驱动皮
带围绕该平坦的圆形表面紧密耦合。此外,除了使用驱动皮带之外,可以使用其他方法驱动螺旋桨轴814,例如,将一个或多个马达直接耦合到螺旋桨轴814以使螺旋桨轴814和螺旋桨轮812旋转。减压轴组件1100可用于本文公开的货币回收系统110-150 和钞票感应系统800,以及自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他信息自助服务机器。
176.图12a至图12c示出了根据本公开的各种实施例的螺旋桨轮812 的各种视图。图12a示出了根据本公开的各种实施例的螺旋桨轮812 的立体图。图12b示出了根据本公开的各种实施例的螺旋桨轮812的前视图。图12c示出了根据本公开的各种实施例的螺旋桨轮812的侧视图。
177.如参照图11a和图11b所述,螺旋桨轮812是减压轴组件1100的一部分,并且螺旋桨轮812包括多个螺旋桨811-1和811-2。如图12a 至图12c所示,在一些实施例中,多个螺旋桨811-1和811-2围绕螺旋桨轮812的外圆周等距间隔,并且从螺旋桨轮812的外圆周延伸一距离。螺旋桨811-1和811-2的延伸长度由,当螺旋桨811-1处于相对于磁性传感器的感应表面旋转的最高点或接近最高点时,螺旋桨轮812 的外圆周与磁性传感器810的感应表面之间的距离来限定。螺旋桨 811-2的长度比螺旋桨811-1短。也就是说,每个螺旋桨811-1的长度使得螺旋桨811-1在其旋转时在某一点处接触磁性传感器810的感应表面,而不会过度抵靠磁性传感器810按压。而每个螺旋桨811-2的长度使得螺旋桨811-2在其旋转时在任何点处都不接触磁性传感器810 的感应表面,从而与图2a至图4d中螺旋桨211抵靠磁性传感器210 的接触相比,减少了螺旋桨811-1抵靠磁性传感器810的接触。螺旋桨811-2的长度比螺旋桨811-1短,使得螺旋桨811-2仍然可以推动钞票1002抵靠磁性传感器810,但与钞票被螺旋桨811-1推动时相比减小了推动钞票1002抵靠磁性传感器810处的压力。这种压力上的减小减少了粘附在钞票1002上的杂质对磁性传感器810的刮擦。
178.在一些实施例中,螺旋桨轮812的螺旋桨811-1和811-2由诸如橡胶的非硬质材料制成,而不是由金属、塑料或其他更硬的材料制成。与其他材料相比,螺旋桨811-1和811-2的材料的柔软性和低刚度显著减少或消除了对磁性传感器810的磨损和/或损坏。此外,由于螺旋桨 811-1和811-2仅在磁性传感器810上的某些点处接触磁性传感器810,例如,图10d中所示的一个点,因此与诸如标准圆形表面驱动轮或刷轮的其他轮类型相比,大大减少了螺旋桨与磁性传感器之间的接触的量,进一步减少或消除了对磁性传感器810的磨损和/或损坏。
179.如图所示,螺旋桨811-1和811-2以直的或对称的取向设置。这使螺旋桨轮812在任一方向上旋转,使得钞票可以被进一步运输到钞票运输路径中或运输出钞票运输路径。例如,如果螺旋桨811-1和811-2 处于弯曲取向或不对称取向,例如在运输方向上弯曲,例如在进一步进入钞票运输路径的方向上弯曲,则螺旋桨811-1和811-2将阻碍系统沿相反方向朝钞票路径入口运输钞票的能力。如果试图反转钞票运输方向,不对称的螺旋桨还可能使钞票堵塞。相反,由于螺旋桨811-1 和811-2是对称的,螺旋桨811-1和811-2使钞票沿钞票运输路径在任一方向上双向运输,例如,如果被拒绝的钞票要被运输回钞票路径入口并且分配。
180.在一些实施例中,如图12a至图12c示出,螺旋桨轮812包括孔 1102,轴,例如螺旋桨轴814,插入穿过该孔1102。孔1102包括平坦的或基本平坦的表面1104。平坦的表面1104
提供螺旋桨轮812和轴之间的增加的表面接触,从而增加了螺旋桨轮812的扭矩。
181.尽管图12a至图12c示出了螺旋桨轮的各种视图,但是可以对图 12a至图12c进行各种改变。螺旋桨轮812的各种部件可以被重新布置、省略、组合或进一步细分,并且可以根据特定需要添加额外的部件。例如,根据特定需要,螺旋桨轮812可以包括任何数量的螺旋桨 811-1和811-2,并且螺旋桨811-1和811-2可以围绕螺旋桨轮812的圆周不同间距地间隔。此外,可以省略平坦的表面1104,使孔1102是完全圆形的。螺旋桨轮812可用于本文公开的货币回收系统110-150和钞票感应系统800,以及自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他自助服务机器。
182.图13a示出了根据本公开的各种实施例的包括螺旋桨轮812和磁性传感器810之间的间隙1302的钞票感应系统800的前视图。图13b 示出了根据本公开的各种实施例的包括螺旋桨轮812和磁性传感器 810之间的间隙1302的钞票感应系统800的侧视图。应该理解的是,图13a和图13b示出的钞票感应系统800与图8a至图8e示出的钞票感应系统800相同,例如除了包括螺旋桨轮812和磁性传感器810 之间的间隙1302之外。
183.在这种实施例中,当钞票进入距磁性传感器的感应表面的预定距离内时,磁性传感器810能够检测钞票中的磁性材料,而螺旋桨轮812 的螺旋桨811-1和811-2不接触磁性传感器810。因此,磁性传感器810 可以,在与螺旋桨轮812相距由间隙1302限定的距离处,安装在钞票路径板802上方的部件中,例如上路径板中。当钞票到达螺旋桨轮812 时,螺旋桨轮812的螺旋桨811-1和811-2将钞票与螺旋桨811-1和811-2 接触的部分朝磁性传感器810提起到间隙1302内,使得磁性传感器810 可以在螺旋桨811-1和811-2不与钞票物理接触的情况下检测钞票。在一些实施例中,间隙1302的高度对应于单张钞票的厚度。在一些实施例中,间隙1302可以小于钞票的厚度。可以调整间隙1302以容纳不同的货币厚度。通常,一张钞票的厚度约为100微米,其中公差约为正负80微米。
184.如图14a所示,例如,钞票路径板1408可以在钞票运输路径的钞票运输方向上在驱动辊1404之前包括额外的孔,例如,用于包括额外的驱动辊或空转器辊的孔。在一些实施例中,上钞票路径板(未示出) 还可以包括与钞票路径板1408的孔相对设置的类似孔,以设置上驱动辊和/或空转器辊。在一些实施例中,上钞票路径板不包括额外的辊,这可以降低钞票堵塞的可能性。在一些实施例中,额外的光学传感器也可以被包括在钞票路径中的其他地方,例如,在驱动辊1404之前的钞票路径的一部分中的额外的孔附近。
185.钞票感应系统1400还包括一个或多个螺旋桨轮1412,每个螺旋桨轮1412包括多个螺旋桨,这些螺旋桨围绕螺旋桨轮1412的外圆周等距间隔,并且从螺旋桨轮1412的外圆周延伸一距离。一个或多个螺旋桨轮1412耦合到螺旋桨轴1414,其中螺旋桨轴1414延伸穿过螺旋桨轮1412中的每一个的中心部分。螺旋桨轮1412设置在钞票路径板1408 的孔中,其中根据当前的旋转阶段,每个螺旋桨轮1412的一部分和相关联的螺旋桨部分地在钞票路径板1408下方延伸,并且每个螺旋桨轮 1412的另一个部分和相关联的螺旋桨部分地在钞票路径板1408上方延伸。圆柱形头1413也耦合到螺旋桨轴1414,该圆柱形头1413可用于耦合到驱动皮带1415。在一些实施例中,圆柱形头1413包括平坦的圆形表面,平坦的驱动皮带围绕该平坦的圆形表面紧密耦合。在一些实施例中,例如,在图14b和图15b中示出的,圆柱形头包括多个齿 1417,多个齿1417与驱动皮带1415的脊啮合。例如,如在图14c、图14e、图15c和图15d中示出的,驱动皮带1415也耦合到驱动轴 1406,例如,类似地耦合到与驱动轴1406附
接的另一个圆柱形头。
186.在一些实施例中,包括在钞票处理装置中的马达(未示出)驱动驱动轴1406以使驱动辊1404旋转,其中驱动皮带1415将扭矩传递到螺旋桨轴1414以也使螺旋桨轮1412旋转。在一些实施例中,马达驱动单独的驱动头1417,该驱动头1417以与驱动轴1406和螺旋桨轴1414 的圆柱形头类似的方式耦合到驱动皮带1415,但是如图14e和图15d 中示出的来定位,使得驱动皮带1415相对于驱动头1417升高,从而在驱动皮带1415上提供增加的张力。随着驱动头1417旋转,驱动皮带1415移动,驱动皮带1415旋转并且将扭矩传递到驱动轴1406和螺旋桨轴1414两者,进而也使驱动辊1404和螺旋桨轮1412旋转。
187.在一些实施例中,包括在钞票处理装置中的马达(未示出)驱动驱动轴1406以使驱动辊1404旋转,其中驱动皮带1415将扭矩传递到螺旋桨轴1414以也使螺旋桨轮1412旋转。在一些实施例中,马达驱动单独的驱动头1417,该驱动头1417以与驱动轴1406和螺旋桨轴1414 的圆柱形头类似的方式耦合到驱动皮带1415,但是如图14e和图15d 中示出的来定位,使得驱动皮带1415相对于驱动头1417升高,从而在驱动皮带1415上提供增加的张力。随着驱动头1417旋转,驱动皮带1415移动,驱动皮带1415旋转并将扭矩传递到驱动轴1406和螺旋桨轴1414两者,进而也使驱动辊1404和螺旋桨轮1412旋转。
188.图16a和图16b示出了根据本公开的各种实施例的减压轴组件 1600。图16a示出了根据本公开的各种实施例的减压轴组件1600的立体图。图16b示出了根据本公开的各种实施例的减压轴组件1600的侧视图。
189.如图16a和图16b所示,减压轴组件1600包括螺旋桨轮1412,螺旋桨轮1412耦合到螺旋桨轴1414,如参照图14a至图15d所述。每个螺旋桨轮1412包括多个螺旋桨1411。在一些实施例中,多个螺旋桨1411围绕螺旋桨轮1412的外圆周等距间隔,并且从螺旋桨轮1412 的外圆周延伸一距离。螺旋桨1411的长度由,当螺旋桨1411处于相对于磁性传感器的感应表面旋转的最高点或接近最高点时,螺旋桨轮 1412的外圆周与磁性传感器1410的感应表面之间的距离来限定。也就是说,每个螺旋桨1411的长度使得螺旋桨1411在其旋转时在一个或多个点处接触磁性传感器1410的感应表面,而不会过度抵靠磁性传感器1410按压,并且限制了与磁性传感器1410接触的量。螺旋桨轴1414 延伸穿过螺旋桨轮1412中的每一个的中心部分。圆柱形头1413也耦合到螺旋桨轴1414,圆柱形头1413包括齿1417,可用于耦合到驱动皮带1415,如关于图14a至图15d描述的。
190.在一些实施例中,马达(未示出)使驱动皮带旋转螺旋桨轴1414 的圆柱形头1413。在一些实施例中,随着螺旋桨轴1414旋转,螺旋桨轮1412和螺旋桨1411旋转以提起钞票,以接触磁性传感器,例如磁性传感器1410。在一些实施例中,螺旋桨轮1412中的每一个的螺旋桨 1411由诸如橡胶的非硬质材料制成,而不是由金属、塑料或其他更硬的材料制成。与其他材料相比,螺旋桨1411的材料的柔软性和低刚度显著减少或消除了对磁性传感器1410的磨损和/或损坏。此外,由于螺旋桨1411仅在磁性传感器1410上的某些点处接触磁性传感器1410,例如,图14e中所示的两个点,因此与诸如标准圆形表面驱动轮或刷轮的其他轮类型相比,大大减少了螺旋桨与磁性传感器之间的接触的量,进一步减少或消除了对磁性传感器1410的磨损和/或损坏。
191.尽管图16a和16b示出了减压轴组件的各种视图,但是可以对图 16a和图16b进行各种改变。减压轴组件1400的各种部件可以被重新布置、省略、组合或进一步细分,并且可
以根据特定需要添加额外的部件。例如,减压轴组件1400可以包括任何数量的螺旋桨轮1612和/ 或螺旋桨1611。在一些实施例中,圆柱形头1613可以包括平坦的圆形表面,平坦的驱动皮带围绕该平坦的圆形表面紧密耦合。此外,除了使用驱动皮带之外,可以使用其他方法驱动螺旋桨轴1614,例如,将一个或多个马达直接耦合到螺旋桨轴1614以使螺旋桨轴1614和螺旋桨轮1612旋转。减压轴组件1400可用于本文公开的货币回收系统 110-150和钞票感应系统1600,以及自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他信息自助服务机器。
192.图17a至图17c示出了根据本公开的各种实施例的螺旋桨轮1412 的各种视图。图17a图示了根据本公开的各种实施例的螺旋桨轮1412 的立体图。图17b示出了根据本公开的各种实施例的螺旋桨轮1412 的前视图。图17c示出了根据本公开的各种实施例的螺旋桨轮1412 的侧视图。
193.如参照图16a和图16b所述,螺旋桨轮1412是减压轴组件1100 的一部分,并且螺旋桨轮1412包括多个螺旋桨1411-1和1411-2。如图17a至图17c所示,在一些实施例中,多个螺旋桨1411-1和1411-2 围绕螺旋桨轮1412的外圆周等距间隔,并且从螺旋桨轮1412的外圆周延伸一距离。螺旋桨1411-1和1411-2的延伸长度由,当螺旋桨1411-1 处于相对于磁性传感器的感应表面旋转的最高点或接近最高点时,螺旋桨轮1412的外圆周与磁性传感器1410的感应表面之间的距离来限定。螺旋桨1411-2的长度比螺旋桨1411-1短。也就是说,每个螺旋桨 1411-1的长度使得螺旋桨1411-1在其旋转时在某一点处接触磁性传感器1410的感应表面,而不会过度抵靠磁性传感器1410按压。而每个螺旋桨1411-2的长度使得螺旋桨1411-2在其旋转时在任何点处都不接触磁性传感器1410的感应表面,从而与图2a至图4d中螺旋桨211 抵靠磁性传感器210的接触相比,减少了螺旋桨1411-1抵靠磁性传感器1410的接触。螺旋桨1411-2的长度比螺旋桨1411-1短,使得螺旋桨1411-2仍然可以推动钞票1002抵靠磁性传感器1410,但与钞票被螺旋桨1411-1推动时相比减小了推动钞票1002抵靠磁性传感器1410 处的压力。这种压力上的减小减少了粘附在钞票1002上的杂质对磁性传感器1410的刮擦。
194.在一些实施例中,螺旋桨轮1412的螺旋桨1411-1和1411-2由诸如橡胶的非硬质材料制成,而不是由金属、塑料或其他更硬的材料制成。与其他材料相比,螺旋桨1411-1和1411-2的材料的柔软性和低刚度显著减少或消除了对磁性传感器1410的磨损和/或损坏。此外,由于螺旋桨1411-1仅在磁性传感器1410上的某些点处接触磁性传感器 1410,例如,图10d中所示的一个点,因此与诸如标准圆形表面驱动轮或刷轮的其他轮类型相比,大大减少了螺旋桨与磁性传感器之间的接触的量,进一步减少或消除了对磁性传感器1410的磨损和/或损坏。
195.在一些实施例中,如图17a至图17c示出,螺旋桨轮1412包括孔1602,轴,例如螺旋桨轴1414插入穿过该孔1602。孔1602包括平坦的或基本平坦的表面1604。平坦的表面1604提供螺旋桨轮1412和轴之间的增加的表面接触,从而增加了螺旋桨轮1412的扭矩。
196.尽管图17a至图17c示出了螺旋桨轮的各种视图,但是可以对图 17a至图17c进行各种改变。螺旋桨轮1412的各种部件可以被重新布置、省略、组合或进一步细分,并且可以根据特定需要添加额外的部件。例如,根据特定需要,螺旋桨轮1412可以包括任何数量的螺旋桨 1411-1和1411-2,并且螺旋桨1411-1和1411-2可以围绕螺旋桨轮1412 的圆周不同间
距地间隔。此外,可以省略平坦的表面1604,使孔1602 是完全圆形的。螺旋桨轮1412可用于本文公开的货币回收系统110-150 和钞票感应系统1400,以及自动售票机器、自动支付系统、顾客辅助支付系统、自动取款机器、自动售货机器和其他自助服务机器。
197.在其他实施例中,当钞票进入距磁性传感器的感应表面的预定距离内时,磁性传感器1410能够检测钞票中的磁性材料,而螺旋桨轮1412的螺旋桨1411-1和1411-2不接触磁性传感器1410。因此,磁性传感器1410可以,在与螺旋桨轮1412相距由间隙(未示出)限定的的距离处,安装在钞票路径板1402上方的部件中,例如上路径板中。当钞票到达螺旋桨轮1412时,螺旋桨轮1412的螺旋桨1411-1和1411-2 将钞票与螺旋桨1411-1和1411-2接触的部分朝磁性传感器1410提起到间隙1302内,使得磁性传感器1410可以在螺旋桨1411-1和1411-2 不与钞票物理接触的情况下检测钞票。在一些实施例中,间隙的高度对应于单张钞票的厚度。在一些实施例中,间隙可以小于钞票的厚度。可以调整间隙以容纳不同的货币厚度。通常,一张钞票的厚度约为100 微米,公差约为正负140微米。
198.图18a至图18b示出了根据本公开的各种实施例的钞票感应系统 1800的各种视图。图18a示出了根据本公开的各种实施例的钞票感应系统1800的前视图。图18b示出了根据本公开的各种实施例的钞票感应系统1800的侧视图。钞票感应系统1800可以被包括在钞票接受系统110或钞票回收系统120-150中或成为钞票接受系统110或钞票回收系统120-150的一部分,例如,在这种钞票回收系统的钞票感应模块中,或在其他货币装置中。应该理解的是,图18a至图18b中示出的钞票感应系统1800被示出为货币装置的钞票运输路径的一部分,例如,钞票运输路径在本文描述的钞票感应模块内的一部分。
199.钞票感应系统1800包括根据本公开的各种实施例的磁性传感器 1810。在一些实施例中,磁性传感器可以是磁阻头,磁阻头在磁性传感器的中心部分具有矩形区域,用于在一个通道中读取。在一些实施例中,磁性传感器是磁阻传感器,磁阻传感器包括平坦的感应表面并且可以在多个通道中读取,例如,18至10个通道。磁性传感器用于钞票处理装置中以检测包括在钞票中的用于钞票检测、识别和/或真实性验证的磁性材料。在一些实施例中,为了使磁性传感器正确地检测或感应在钞票路径中经过传感器附近的钞票,钞票与磁性传感器物理接触。在其他实施例中,磁性传感器可以检测靠近磁性传感器的钞票,而无需钞票物理地接触磁性传感器。如本文所述,钞票装置中用于使钞票与磁性传感器接触的其他部件引入了各种问题,例如,由于用过大的力抵靠磁性传感器摩擦或按压而导致磁性传感器磨损或损坏,或由可能磨损或损坏磁性传感器的硬质材料制成。磁性传感器1810可以通信地连接到处理器或其他系统部件,例如,图19和图20中示出的。
200.钞票感应系统1800包括钞票路径板1802,钞票路径板1802形成钞票运输路径的一部分。在一些实施例中,钞票路径板1802是钞票路径的底板,其中下钞票路径板(未示出)与钞票路径板1802耦合、可移除地耦合或可旋转地耦合,为钞票路径提供封闭区域,并且还为磁性传感器1810提供耦合表面,使得磁性传感器1810耦合到该下板。钞票路径板1802包括一个或多个切口或孔,一个或多个驱动轮或驱动辊1804穿过该一个或多个切口或孔设置。驱动辊1804耦合到驱动轴 1806,其中驱动轴1806在钞票路径板1802下方延伸穿过驱动辊1804 中的每一个的中心部分。一个或多个光学传感器(未示出)也可以安装在钞票路径板1802中。在一些实施例中,光学传感器安装在磁性传感器1810之后的钞票路径的一部分中。在本公开的各种实施例中,安装的光学传感器可以包括可见光传感器、红外(ir)光传感器
和/或紫外线(uv)光传感器。光学传感器可以通信地连接到处理器或其他系统部件,例如,在图19和图20中示出的。在本公开的各种实施例中,光学传感器安装在磁性传感器1810的上游。
201.如图18a所示,例如,钞票路径板1802可以在钞票运输路径的钞票运输方向上在驱动辊1804之前包括额外的孔,例如,用于包括额外的驱动辊或空转器辊的孔。在一些实施例中,下钞票路径板(未示出) 还可以包括与钞票路径板1802的孔相对设置的类似孔,以设置下驱动辊和/或空转器辊。在一些实施例中,下钞票路径板不包括额外的辊,这可以降低钞票堵塞的可能性。在一些实施例中,额外的光学传感器也可以被包括在钞票路径中的其他地方,例如,在驱动辊1804之前的钞票路径的一部分中的额外的孔附近。
202.钞票感应系统1800还包括一个或多个螺旋桨轮1812,每个螺旋桨轮1812包括多个螺旋桨,这些螺旋桨围绕螺旋桨轮1812的外圆周等距间隔,并且从螺旋桨轮1812的外圆周延伸一距离。一个或多个螺旋桨轮1812耦合到螺旋桨轴1814,其中螺旋桨轴1814延伸穿过螺旋桨轮1812中的每一个的中心部分。螺旋桨轮1812设置在钞票路径板1802 的孔中,其中根据当前的旋转阶段,每个螺旋桨轮1812的一部分和相关联的螺旋桨部分地在钞票路径板1802上方延伸,并且每个螺旋桨轮 1812的另一个部分和相关联的螺旋桨部分地在钞票路径板1802上方延伸。圆柱形头1813也耦合到螺旋桨轴1814,该圆柱形头1813可用于耦合到驱动皮带1815。在一些实施例中,圆柱形头1813包括平坦的圆形表面,平坦的驱动皮带围绕该平坦的圆形表面紧密耦合。在一些实施例中,例如,在图18a至图18b中示出的,圆柱形头包括多个齿 1817,多个齿1817与驱动皮带1815的脊啮合。驱动皮带1815还耦合到驱动轴1806,例如,类似地耦合到与驱动轴1806附接的另一个圆柱形头。
203.在一些实施例中,包括在钞票处理装置中的马达(未示出)驱动驱动轴1806以使驱动辊1804旋转,其中驱动皮带1815将扭矩传递到螺旋桨轴1814以也使螺旋桨轮1812旋转。在一些实施例中,马达驱动单独的驱动头1807,该驱动头1807以与驱动轴1806和螺旋桨轴1814 的圆柱形头类似的方式耦合到驱动皮带1815,但是如图18a至图18b 示出的来定位,使得驱动皮带1815相对于驱动头1807升高,从而在驱动皮带1815上提供增加的张力。随着驱动头1807旋转,驱动皮带 1815移动,驱动皮带1815旋转并且将扭矩传递到驱动轴1806和螺旋桨轴1814两者,进而也使驱动辊1804和螺旋桨轮1812旋转。
204.图19示出了根据本公开的各种实施例的电子系统1900的示例。系统1900可以是货币回收系统110-150的一部分,或者是结合了如本公开的各种实施例中描述的钞票感应系统200和减压轴组件500的其他钞票装置的一部分。系统1900包括可以是处理器1606的控制器(例如,处理器/中央处理单元(“cpu”))1902、存储器单元1904和输入 /输出(“i/o”)设备1906。系统1900还包括至少一个网络接口1908,或网络接口控制器(nic)。
205.系统1900还包括一个或多个传感器1910,一个或多个传感器1910 用于捕获和/或测量数据。在一些实施例中,系统1900包括成像传感器,例如本文描述的光学传感器,作为传感器1910中的至少一个,使得成像传感器与系统1900的一个或多个其他部件通信。类似地,在一些实施例中,系统1900包括磁性传感器,例如磁性传感器210,作为传感器1910中的至少一个,使得磁性传感器与系统1900的一个或多个其他部件通信。
206.系统1900还包括存储驱动器1912,存储驱动器812用于存储诸如钞票数据的内容。在一些实施例中,部件1902、1904、1906、1908、 1910和1912通过数据传输系统(例如,总线)
1914相互连接。在一些实施例中,某些部件,例如传感器1910,可以不被连接到数据传输系统1914,并且可以经由有线连接或无线连接连接到处理器1902或处理器1902的接口或其他部件。动力供应单元(psu)1916经由动力传输系统1918(与数据传输系统1914一起示出,尽管动力传输系统和数据传输系统可以是分开的)向系统1900的部件提供动力。应该理解的是,系统1900可以被不同地配置,并且每个列出的部件实际上可以表示几种不同的部件。例如,cpu1902可以表示多处理器或分布式处理系统;存储器单元1904可以包括不同级别的高速缓冲存储器和主存储器;i/o设备1906可以包括监视器、键盘、触摸屏等;至少一个网络接口1908可以包括一个或多个网卡,一个或多个网卡提供到网络1920 的一个或多个有线连接和/或无线连接;并且存储驱动器1912可以包括硬盘和远程存储位置。因此,预期在系统1900的配置上具有广泛的灵活性,其范围可以从主要为单个用户或自主操作配置的单个物理平台到诸如云计算系统的分布式多用户平台。
207.在一些实施例中,系统1900可以使用一个操作系统(或多个操作系统),包括由微软(诸如windows)、苹果(诸如mac os x)、 unix、rtos和linux提供的各种版本的操作系统,并且根据系统 1900的使用,可以包括专门为手持设备(例如,ios、android、 rtos和/或blackberry)、个人计算机、服务器和其他计算平台开发的操作系统。操作系统以及其他指令(例如,用于由系统1900提供的远程通信和/或其他功能)可以存储在存储器单元1904中并且由处理器1902执行。例如,存储器单元1904可以包括用于使钞票沿着本文描述的钞票路径运输的指令,以及用于使用从光学传感器或磁性传感器收集的数据来执行钞票识别和真实性验证的指令。
208.网络1920可以是单个网络或者可以表示多个网络,包括不同类型的网络,无论是无线的还是有线的。例如,系统1900可以经由网络耦合到外部设备,该网络包括耦合到数据包网络的蜂窝链路,或者可以经由数据包链路耦合,该数据包链路耦合例如是耦合到数据包网络的广域网(wlan)或公共交换电话网(pstn)。因此,许多不同的网络类型和配置可用于将系统1900与外部设备耦合。
209.图20示出了根据本公开的各种实施例的电子系统2000的示例。系统2000可以是货币回收系统110-150的一部分,或者是结合了如本公开的各种实施例中描述的钞票感应系统200和减压轴组件500的其他钞票装置的一部分。系统2000包括可以是处理器1606的控制器(例如,处理器/中央处理单元(“cpu”))2002、存储器单元2004和输入 /输出(“i/o”)设备2006。
210.系统2000还包括一个或多个传感器2010,一个或多个传感器910 用于捕获和/或测量数据。在一些实施例中,系统2000包括成像传感器,例如本文描述的光学传感器,作为传感器2010中的至少一个,使得成像传感器与系统2000的一个或多个其他部件通信。类似地,在一些实施例中,系统2000包括磁性传感器,例如磁性传感器210,作为传感器2010中的至少一个,使得磁性传感器与系统2000的一个或多个其他部件通信。
211.系统2000还包括存储驱动器2012,存储驱动器2012用于存储诸如钞票数据的内容。在一些实施例中,部件2002、2004、2006、2010 和2012通过数据传输系统(例如,总线)2014相互连接。在一些实施例中,某些部件,例如传感器2010,可以不被连接到数据传输系统2014,并且可以经由有线连接或无线连接连接到处理器2002或处理器2002 的接口或其他组件。动力供应单元(psu)2016经由电力传输系统2018 (与数据传输系统2014一起示出,
尽管动力传输系统和数据传输系统可以是分开的)向系统2000的部件提供动力。应该理解的是,系统 2000可以被不同地配置,并且每个列出的部件实际上可以表示几种不同的部件。例如,cpu2002可以表示多处理器或分布式处理系统;存储器单元2004可以包括不同级别的高速缓冲存储器和主存储器;i/o 设备2006可以包括监视器、键盘、触摸屏等;并且存储驱动器2012 可以包括硬盘和远程存储位置。
212.在一些实施例中,系统2000可以使用一个操作系统(或多个操作系统),包括由微软(诸如windows)、苹果(诸如mac os x)、unix、rtos和linux提供的各种版本的操作系统,并且根据系统 2000的使用,可以包括专门为手持设备(例如,ios、android、 rtos和/或blackberry)、个人计算机、服务器和其他计算平台开发的操作系统。操作系统以及其他指令(例如,用于由系统2000提供的远程通信和/或其他功能)可以存储在存储器单元2004中并且由处理器2002执行。例如,存储器单元2004可以包括用于使钞票沿着本文描述的钞票路径运输的指令,以及用于使用从光学传感器或磁性传感器收集的数据来执行钞票识别和真实性验证的指令。
213.本公开的一个示例性实施例可以包括钞票装置,该钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处。减压轴组件包括:轴,其可用于沿钞票运输路径的运输方向旋转;一个或多个螺旋桨轮,其耦合到该轴且可用于随轴旋转;以及多个螺旋桨,其从一个或多个螺旋桨轮中的每一个的表面延伸,其中大约一半的螺旋桨比其他螺旋桨短,并且在轴和一个或多个螺旋桨轮的旋转期间,多个螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器推动。
214.在一个或多个上述示例中,多个螺旋桨是直的。
215.在一个或多个上述示例中,多个螺旋桨是弯曲的。
216.在一个或多个上述示例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
217.在一个或多个上述示例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
218.在一个或多个上述示例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
219.在一个或多个上述示例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
220.在一个或多个上述示例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分。
221.在一个或多个上述示例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
222.在一个或多个上述示例中,当多个螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器提起时,钞票的一部分接触磁性传感器。
223.在一个或多个上述示例中,磁性传感器设置在钞票运输路径的宽度上方。
224.在一个或多个上述示例中,磁性传感器设置在钞票运输路径的宽度下方。
225.在一个或多个上述示例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
226.在一个或多个上述示例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器上方横跨钞票运输路径的宽度间隔。
227.在一个或多个上述示例中,多个螺旋桨由橡胶材料制成。
228.在一个或多个上述示例中,多个螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔,并且多个螺旋桨中的每一个以一种取向延伸。
229.在一个或多个上述示例中,轴还可用于沿钞票运输路径的分配方向旋转。
230.在一个或多个上述示例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
231.在一个或多个上述示例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。
232.另一个示例性实施例可以包括钞票装置,该钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处,减压轴组件包括可用于沿钞票运输路径的运输方向旋转的轴、耦合到轴且可用于随轴旋转的一个或多个螺旋桨轮,以及从一个或多个螺旋桨轮中的每一个的表面延伸的多个螺旋桨,其中在轴和一个或多个螺旋桨轮的旋转期间,多个螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器推动。
233.在一个或多个上述示例中,多个螺旋桨是直的。
234.在一个或多个上述示例中,多个螺旋桨是弯曲的。
235.在一个或多个上述示例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
236.在一个或多个上述示例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
237.在一个或多个上述示例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
238.在一个或多个上述示例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
239.在一个或多个上述示例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分。
240.在一个或多个上述示例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
241.在一个或多个上述示例中,当多个螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器提起时,钞票的一部分接触磁性传感器。
242.在一个或多个上述示例中,磁性传感器设置在钞票运输路径的宽度上方。
243.在一个或多个上述示例中,磁性传感器设置在钞票运输路径的宽度下方。
244.在一个或多个上述示例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋
桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
245.在一个或多个上述示例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器上方横跨钞票运输路径的宽度间隔。
246.在一个或多个上述示例中,多个螺旋桨由橡胶材料制成。
247.在一个或多个上述示例中,多个螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔,并且多个螺旋桨中的每一个以直的取向延伸。
248.在一个或多个上述示例中,轴还可用于沿钞票运输路径的分配方向旋转。
249.在一个或多个上述示例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
250.在一个或多个上述示例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。本公开的一个示例性实施例可以包括钞票装置,该钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处。减压轴组件包括:轴,其可用于沿钞票运输路径的运输方向旋转;一个或多个螺旋桨轮,其耦合到该轴且可用于随轴旋转;以及多个直螺旋桨,其从一个或多个螺旋桨轮中的每一个的表面延伸,其中在轴和一个或多个螺旋桨轮的旋转期间,多个直螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器提起。
251.在一个或多个上述示例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
252.在一个或多个上述示例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
253.在一个或多个上述示例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
254.在一个或多个上述示例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
255.在一个或多个上述示例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分。
256.在一个或多个上述示例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
257.在一个或多个上述示例中,当多个直螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器提起时,钞票的一部分接触磁性传感器。
258.在一个或多个上述示例中,磁性传感器设置在钞票运输路径的宽度上方。
259.在一个或多个上述示例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
260.在一个或多个上述示例中,多个直螺旋桨由橡胶材料制成。
261.在一个或多个上述示例中,多个直螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔,并且多个直螺旋桨中的每一个直螺旋桨以直的取向延伸。
262.在一个或多个上述示例中,轴还可用于沿钞票运输路径的分配方向旋转。
263.在一个或多个上述示例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
264.在一个或多个上述示例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。
265.另一个示例性实施例可以包括钞票装置,该钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处,减压轴组件包括可用于沿钞票运输路径的运输方向旋转的轴、耦合到轴且可用于随轴旋转的一个或多个螺旋桨轮、以及从一个或多个螺旋桨轮中的每一个的表面延伸的多个对称螺旋桨,其中在轴和一个或多个螺旋桨轮的旋转期间,多个对称螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器提起。
266.在一个或多个上述示例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
267.在一个或多个上述示例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
268.在一个或多个上述示例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
269.在一个或多个上述示例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
270.在一个或多个上述示例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分。
271.在一个或多个上述示例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
272.在一个或多个上述示例中,当多个对称螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器提起时,钞票的一部分接触磁性传感器。
273.在一个或多个上述示例中,磁性传感器设置在钞票运输路径的宽度上方。
274.在一个或多个上述示例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
275.在一个或多个以上示例中,多个对称螺旋桨由橡胶材料制成。
276.在一个或多个以上示例中,多个对称螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔。
277.在一个或多个以上示例中,轴还可用于沿钞票运输路径的分配方向旋转。
278.在一个或多个上述示例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
279.在一个或多个上述示例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。
280.另一个示例性实施例可以包括钞票装置,该钞票装置包括:钞票运输机构,其可用于沿钞票运输路径运输钞票;磁性传感器;和减压轴组件,其相对于磁性传感器设置在与钞票运输路径相关联的位置处,减压轴组件包括可用于沿钞票运输路径的运输方向旋转的轴、耦合到轴且可用于随轴旋转的一个或多个螺旋桨轮、以及从一个或多个螺旋桨轮中的
每一个的表面延伸的多个螺旋桨,其中在轴和一个或多个螺旋桨轮的旋转期间,多个螺旋桨可用于将钞票运输路径中的钞票的一部分朝磁性传感器提起。
281.在一个或多个上述示例中,钞票装置还包括驱动皮带,驱动皮带由马达驱动,并且其中减压轴组件还包括圆柱形头,圆柱形头耦合到轴,圆柱形头具有用于接收驱动皮带以将旋转运动赋予轴的表面。
282.在一个或多个上述示例中,减压轴组件的圆柱形头包括多个齿,多个齿与驱动皮带的脊啮合。
283.在一个或多个上述示例中,钞票运输机构包括一个或多个驱动辊,该一个或多个驱动辊设置在钞票运输路径中距减压轴组件一距离处,一个或多个驱动辊可用于围绕驱动轴旋转并且接触钞票运输路径中的钞票,以沿运输方向移动钞票。
284.在一个或多个上述示例中,驱动皮带耦合在驱动轴和减压轴组件的圆柱形头之间,以将旋转运动赋予驱动轴和减压轴组件的轴。
285.在一个或多个上述示例中,钞票装置还包括钞票路径板,该钞票路径板限定了钞票运输路径的至少一部分。
286.在一个或多个上述示例中,钞票路径板包括多个孔,穿过多个孔中的每一个设置了一个或多个驱动辊中的一个的一部分或者一个或多个螺旋桨轮中的一个的一部分。
287.在一个或多个上述示例中,当多个螺旋桨将在钞票运输路径中的钞票的一部分朝磁性传感器提起时,钞票的一部分接触磁性传感器。
288.在一个或多个上述示例中,磁性传感器设置在钞票运输路径的宽度上方。
289.在一个或多个上述示例中,一个或多个螺旋桨轮包括多个螺旋桨轮,该多个螺旋桨轮在磁性传感器下方横跨钞票运输路径的宽度间隔。
290.在一个或多个上述示例中,多个螺旋桨由橡胶材料制成。
291.在一个或多个上述示例中,多个螺旋桨围绕一个或多个螺旋桨轮的圆周等距间隔,并且多个螺旋桨中的每一个以直的取向延伸。
292.在一个或多个上述示例中,轴还可用于沿钞票运输送路径的分配方向旋转。
293.在一个或多个以上示例中,一个或多个螺旋桨轮分别包括孔,轴穿过该孔设置。
294.在一个或多个上述示例中,一个或多个螺旋桨轮的孔包括基本平坦的表面,基本平坦的表面接触轴。
295.尽管本公开已经描述了某些实施例和通常相关联的方法,但是这些实施例和方法的更改和置换对于本领域技术人员来说将是显而易见的。因此,示例性实施例的以上描述不限定或限制本公开。在不脱离如以下权利要求中所限定的本公开的精神和范围的情况下,其他改变、替代和更改也是可以的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1