1.本公开涉及减轻车辆(例如,自动驾驶车辆)上的雷达传感器设备之间的雷达干扰的雷达干扰减轻的领域。
背景技术:
2.雷达或雷达传感器是一种检测设备,其使用无线电波来确定关于对象的信息,诸如,对象的范围、角度、形状、大小和/或速度。
3.雷达具有在无线电或微波域中产生电磁波(换言之:电磁信号)的发送器、发送天线、接收天线(同一天线可以用于发送和接收)、接收器和确定对象属性的处理器。来自发送器的雷达信号(该雷达信号是脉冲的或连续的)从对象反射回来并返回到接收器,从而提供关于对象的信息。
4.雷达用于车辆中,以支持驾驶员安全驾驶,例如,用于自适应巡航控制。此外,雷达是自主车辆或自动驾驶车辆的关键要素。它们用于绘制环境地图并检测车辆、障碍物、行人、自行车等,以便安全导航。自动驾驶车辆需要具有多个雷达来覆盖车辆周围的所有侧。雷达具有在诸如白天、黑夜、雨、雾、雪等的各种条件下工作的能力。
5.雷达信号具有不同的特性。例如,雷达信号可以是脉冲的或连续的,并使用不同的调制方案中的一者,诸如,fmcw(调频连续波)、pmcw(调相连续波)、ofdm(正交频分复用)。
6.如今,在汽车领域,许多汽车远程雷达基于调频连续波(fmcw)并在76ghz-77ghz频带或24ghz频带下工作。
7.未来,预计道路上的雷达数量将大幅增加,特别是由于自动驾驶车辆的部署增加和每车辆的雷达数量增加。这将导致对雷达干扰的日益关注。换言之,预计车载雷达传感器之间的雷达干扰将成为一项重大挑战。
8.随着道路上车载雷达数量的增加,超过两个雷达彼此面对并具有相同雷达参数的可能性变得更大,从而导致至少一个雷达(称为受害雷达)被另一雷达(称为干扰雷达)的发送信号渗透,并且会导致受害雷达暂时失明。雷达失明是阻碍自动驾驶车辆部署的主要安全问题。
9.为了避免或限制雷达干扰现象,已知用于雷达干扰减轻的不同技术。
10.第一已知技术基于干扰抑制或消除,例如,通过使用物理层技术。这种方法需要附加处理资源并且本身效率不够。
11.第二已知技术在于将新雷达参数(例如,时间偏移或频率偏移)随机指派给干扰雷达或受害雷达作为避免或限制雷达干扰的对策。第二技术是不够的,因为随着每车辆的雷达数量和配备有雷达的车辆数量的增加,随机指派方案很可能导致有冲突的指派。
12.第三技术在文章“radarmac:mitigating radar interference in self-driving cars”,j.khoury,r.ramanathan,d.mccloskey,r.smith and t.campbell,2016 13th annual ieee international conference on sensing,communication,and networking(secon),london,2016,pp.1-9中公开,其解决了指派无冲突雷达参数以减轻雷达干扰的问
题。radarmac的系统包括控制中心,车队经由lte(长期演进)链路连接至该控制中心。
13.系统按照具有四个步骤的连续环路工作:
14.(1)各个车辆每t
pos
秒向控制中心发送位置信息;
15.(2)控制中心从其管辖范围内所有汽车收集位置信息,并且计算各个汽车上各个雷达的雷达参数;
16.(3)控制中心通过lte链路下推各个汽车的雷达参数和时间戳;
17.(4)汽车在指定的时间戳激活接收到的雷达参数。
18.在radarmac系统中,控制中心单方面将雷达参数指派给各个汽车上的各个雷达。这种技术缺乏灵活性,因为雷达传感器设备被迫在控制中心的控制下改变一些雷达参数。
19.因此,需要一种用于汽车雷达干扰减轻的更灵活的方法。
技术实现要素:
20.本公开涉及一种用于减轻不同车辆上的雷达传感器设备之间的雷达干扰的方法,所述方法包括由第一车辆上的第一雷达传感器设备执行的以下步骤:
21.基于从多个源接收的信息,确定关于所述车辆的周围环境中的驾驶场景的信息,
22.基于所确定的关于所述驾驶场景的信息,确定如何改变所述第一雷达传感器设备的至少一个雷达参数以避免可能的雷达干扰,并根据该确定改变所述至少一个雷达参数。
23.基于从多个源或系统接收到的所述信息,所述车辆的所述雷达传感器设备可以自行确定所述车辆的所述周围环境中正在发生的驾驶场景,并且基于关于所述驾驶场景的所述信息,以灵活、高效和相关的方式改变自己的雷达参数以避免可能的雷达干扰。
24.信息的所述多个源可以具有不同类型。
25.在实施方式中,从多个源接收信息的步骤可以包括:通过车辆到车辆通信从至少一个第二车辆接收所述第二车辆上的第二雷达传感器设备的雷达参数信息。
26.在实施方式中,从多个源接收信息的步骤可以包括:通过车辆到网络通信从通信网络的至少一个设备接收信息。
27.在实施方式中,从多个源接收信息的步骤可以包括:从至少一个第二车辆上的第二雷达传感器设备接收雷达信号以及通过分析接收到的雷达信号来确定所述第二雷达传感器设备的雷达参数信息的步骤。
28.在实施方式中,从多个源接收信息的步骤可以包括:从广播中心接收位于区域中的车辆上的雷达传感器设备的列表。
29.在实施方式中,从多个源接收信息的步骤可以包括:接收一个或更多个去中心化环境通知消息denm,所述denm包括与一个或更多个检测到的事件有关的信息。
30.有利地,确定如何改变所述第一雷达传感器设备的至少一个雷达参数以避免可能的雷达干扰的步骤可以包括:根据关于所述环境的所述信息,从多个雷达传感器设备共享的用于雷达干扰减轻的预定义协作规则的集合中选择规则,并且根据该确定改变所述至少一个雷达参数的步骤可以包括:在所述第一雷达传感器设备中根据所选择的规则激活新的雷达操作参数。
31.所述雷达传感器设备可以基于由一群雷达传感器设备共享的协作规则来减轻雷达干扰。所述雷达传感器设备首先识别所述车辆必须处理的当前驾驶场景,并根据所识别
的驾驶场景选择适当的协作规则来确定要激活的新的雷达参数,从而减轻可能的雷达干扰。雷达传感器设备之间的协作是基于所有雷达传感器设备遵循的共享的协作规则的,并且允许以效率更高的协作方式减轻雷达干扰。
32.改变至少一个雷达参数的步骤可以包括:改变组的参数中的至少一者,所述组包括调制带宽、频率偏移、时间偏移、发送功率电平、占空比、极化、调制类型。
33.本公开还涉及一种雷达传感器设备,所述雷达传感器设备包括用于发送雷达波信号的发送器部分、用于接收雷达波信号的接收器部分、存储由多个雷达传感器设备共享的用于雷达干扰减轻的预定义协作规则集的存储器以及执行先前限定的方法的步骤的装置。
34.本公开还涉及一种计算机程序,所述计算机程序包括使上文限定的雷达传感器设备执行先前限定的方法的步骤的指令。
35.本公开还涉及一种计算机可读介质,所述计算机可读介质存储有所述计算机程序。
36.本公开还涉及一种车辆,所述车辆包括至少一个先前限定的雷达传感器设备。
37.本公开还涉及一种系统,所述系统包括多个上文限定的车辆。
附图说明
38.借助于阅读参照附图做出的非限制性实施方式的详细说明,本公开的其它特征、目的和优点将变得更加清楚。
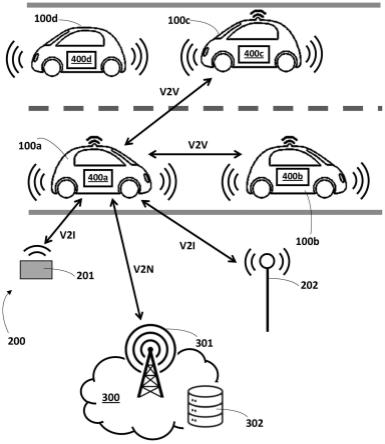
39.图1示出了根据实施方式的用于减轻区域中车辆上的雷达传感器设备之间的雷达干扰的分布式系统。
40.图2是根据实施方式的由车辆上的雷达传感器设备执行的用于雷达干扰减轻的方法的流程图。
41.图3是根据实施方式的雷达传感器设备的功能框图。
42.图4表示根据实施方式的由雷达传感器设备发送的雷达信号和由雷达传感器设备接收的回波雷达信号。
具体实施方式
43.图1示出了用于雷达干扰减轻的分布式系统,所述分布式系统包括多个车辆100。各个车辆100配备有一个或更多个雷达传感器设备400。
44.在图1的例示性和非限制性示例中,表示了四个车辆100a、100b、100c和100d,并且为了清楚起见,在各个车辆100a、100b、100c、100d上仅示出了一个雷达传感器400a、400b、400c、400d。然而,各个车辆可以具有超过一个雷达传感器设备。在图1所示的示例中,四个车辆100a-100d在同一道路上彼此靠近。
45.存在两种雷达传感器设备400:
[0046]-连接的雷达传感器设备,其能够与在容纳雷达传感器设备400的车辆100外部的其它系统或信息源(诸如,另一车辆、另一车辆上的雷达传感器设备、道路基础设施的组成部分和/或移动通信网络的要素)进行双向通信,
[0047]-未连接的雷达传感器设备,其无法与车辆100外部的其它系统进行通信。
[0048]
在第一实施方式中,连接的雷达传感器设备400经由车辆100的车载网络的通信接
口与车辆100外部的系统或源进行通信。在这种情况下,雷达传感器设备400具有用于与车辆100的车载网络进行接口连接的内部通信接口,并使用连接的车辆100的通信接口与车辆100外部的其它系统进行通信。在第二实施方式中,连接的雷达传感器设备可以建立与外部系统的直接无线通信。在这种情况下,连接的雷达传感器设备400具有用于与车辆100外部(和/或内部)的其它系统进行无线通信的内部通信模块。
[0049]
例如,三个车辆100a-100c是容纳连接的雷达传感器设备400a-400c的连接车辆,并且车辆100d是容纳未连接的雷达传感器设备400d的非连接车辆。
[0050]
在以下描述中,现在将描述连接的雷达传感器设备400a的操作。系统的其它连接的雷达传感器设备400b、400c以类似方式操作。
[0051]
雷达传感器设备400a可以通过不同类型的通信与车辆100a外部的系统或源进行通信,不同类型的通信以非限制性方式包括v2v(车辆到车辆)通信、v2i(车辆到基础设施)通信、v2n(车辆到网络)通信以及更普遍的v2x(车辆到一切)通信。因此,雷达传感器设备400a可以与其它车辆(例如,车辆100b、100c)、其它车辆上的雷达传感器设备(例如,雷达传感器设备400b、400c)、道路基础设施200的组成部分201、202(诸如,车道标记、路标、交通灯、路侧单元202或道路基础设施200的任何其它通信要素)和/或蜂窝通信网络300的系统(诸如,基站301或网络服务器)进行通信。
[0052]
雷达传感器设备400在某些操作雷达参数下工作。雷达参数限定雷达传感器设备400发送和接收的雷达信号的特性。在一些实施方式中,雷达参数包括限定雷达信号调制特性的调制参数、占空比和发送功率电平。占空比被限定为观察时间与测量周期的总时间之比,该观察时间与测量周期内发送雷达信号和接收回波雷达信号的时间段相对应。
[0053]
例如,雷达传感器设备400a是fmcw雷达(调频连续波雷达)。fmcw雷达辐射连续发送功率并在测量周期期间改变其工作频率(换言之,发送信号在频率上被周期性地调制)。例如,如图4所示,fmcw雷达传感器设备400a在各个周期根据正斜坡(positive ramp)随时间推移线性改变其工作频率。在fmcw(调频连续波)雷达的情况下,雷达参数可以包括相对于参考频率(对应于图4中图表的原点)的频率偏移f0、限定各个测量周期开始的时隙的时间偏移t0、雷达频带b内的带宽δf(例如,斜坡带宽)、占空比d和发送功率电平。作为例示性和非限制性示例,雷达频带b是76ghz至77ghz之间的频率范围。雷达传感器设备400a可以是任何其它类型的雷达,诸如,pmcw雷达(相位调制连续波)雷达或ofdm(正交频分复用)雷达等。
[0054]
现在将描述根据实施方式的雷达传感器设备400a的操作。
[0055]
在操作中,为了绘制其环境地图,雷达传感器设备400a可以按照连续环路执行测量循环,如图4所示。作为例示性和非限制性示例,各个测量周期的持续时间是60毫秒。
[0056]
雷达传感器设备400a还按照连续环路执行雷达干扰减轻过程,如图2所示。该过程包括以下步骤s0至s8。可以在雷达传感器设备400a的测量周期期间执行步骤s0至s8。步骤s0至s8可以周期性地重复,例如,在各个测量周期。
[0057]
在步骤s0,新的循环开始。
[0058]
在第一步骤s1,雷达传感器设备400a基于从多个源接收的信息来确定关于车辆100a的周围环境中的驾驶场景的信息。
[0059]
驾驶场景描述了一系列情景中的多个情景之间的时间发展,并且跨越一定量的时
间。各个情景对应于环境快照,该环境快照包括风景和动态要素以及所有行动者和观察者的自我表现以及这些实体之间的关系。这些术语《情景》和《场景》在参考文献s.ulbrich,t.menzel,a.reschka,f.schuldt und m.maurer.《defining and substantiating the terms scene,situation and scenario for automated driving》.in:2015ieee international conference on intelligent transportation systems(itsc).angenommen.2015中限定。
[0060]
驾驶场景信息包括关于当前正在发生并且在车辆100a的环境中的情况和事物或事件的信息。
[0061]
为了获得驾驶场景信息,雷达传感器设备400a与车辆100a外部的其它系统或源(诸如,其它车辆和/或其它雷达传感器设备和/或道路基础设施组成部分和/或蜂窝网络设备)进行通信,以便获取关于必须处理的驾驶场景的信息。例如,如图1所示,雷达传感器设备400a与雷达传感器设备400b、400c和/或车辆100b、100c、道路基础设施要素201、路侧单元202和蜂窝网络300的基站301进行通信。
[0062]
在实施方式中,雷达传感器设备400a和/或车辆100a的通信接口可以从充当its-s(智能交通系统站)的一个或更多个源接收去中心化环境通知消息denm,该denm包括与检测到的事件有关的信息。去中心化环境通知消息在标准文档etsi en 302 637-3 v1.2.2(2014-11)中限定。denm的交换通过denm协议在its-s之间进行。在检测到事件后,发起的its-s发送denm,以便将关于该事件的信息传播给位于相关区域内的其它its-s。检测到的事件可以包括不同类型的事件,诸如,交通状况、事故、道路工程、天气状况、表面状况、道路上的障碍物、道路上的动物、道路上的人的存在、错误的驾驶方式、正在进行的救援或恢复工作、慢速车辆、危险队列末端、车辆故障、碰撞后、静止车辆、紧急车辆接近、危险弯道、碰撞风险、信号违规、危险情况等。
[0063]
雷达传感器设备400a通过与车辆100a外部的其它系统或源的通信获得的驾驶场景信息可以包括不同类型的数据或信息,例如:
[0064]-关于车辆100a的交通环境中的其它车辆上的一个或更多个雷达传感器设备(例如,图1中的雷达传感器设备400b、400c)的信息;
[0065]-关于车辆100a的环境中的车辆的信息(例如,车辆的数量、车辆的位置、速度、加速度和/或方向)
[0066]-关于道路交通的信息(例如,交通拥堵或交通顺畅);
[0067]-关于路标和道路信号设备(诸如,速度交通标志和交通信号灯)的信息,
[0068]-关于队列行驶的信息(换言之:一组车辆紧密行驶并通过无线接收加速和转向信息跟随头车,从而形成电子连接的“公路列车”);
[0069]-关于提供无线电天文服务保护的国家无线电静默区的信息。
[0070]
上述示例是非限制性的,并且可以经由与其它系统或源的通信来获得关于驾驶场景的任何其它信息项。
[0071]
关于雷达传感器设备的信息可以包括雷达参数信息,该雷达参数信息指示由所述雷达传感器设备使用的当前雷达操作参数。
[0072]
可以通过车辆到车辆通信接收关于另一车辆上的雷达传感器设备的信息。例如,雷达传感器设备400a通过车辆100a与车辆100b之间的第一v2v通信接收关于雷达传感器设
备400b的信息以及通过车辆100a与车辆100c之间的第二v2v通信接收关于雷达传感器设备400c的信息。
[0073]
由雷达传感器设备400a获得的关于其它雷达传感器设备的信息还可以以非限制性方式包括:
[0074]-指示其它雷达传感器设备和/或容纳它的车辆的位置、速度、加速度、取向的位置和/或移动信息;
[0075]-指示已经检测到雷达传感器设备400a与其它雷达传感器设备之间的雷达干扰或尚未检测到雷达干扰的信息;
[0076]-指示其它雷达传感器设备是协作雷达传感器设备(即,根据协作规则操作的雷达传感器设备,稍后描述)或非协作雷达传感器设备的信息。
[0077]
还可能发生雷达传感器设备400a没有获得关于在其环境中检测到的另一雷达传感器设备的任何信息。在这种情况下,雷达传感器设备400a确定两个雷达传感器设备之间不可能进行协作以减轻雷达干扰。
[0078]
在步骤s1,雷达传感器设备400a还可以经由车辆到基础设施通信从道路基础设施要素接收数据和/或通过蜂窝网络300经由车辆到网络通信从服务器接收数据(例如,来自道路交通监测服务器的交通数据)。例如,雷达传感器设备400a可以通过车辆到基础设施的通信从速度交通标志接收关于道路上的限速的信息,和/或通过车辆到网络的通信从向驾驶员提供交通和导航服务的服务器接收交通信息。
[0079]
在实施方式中,雷达传感器设备400a通过接收位于车辆100a所在区域a中的车辆上的雷达传感器设备的列表li来接收关于其它车辆上的一个或更多个雷达传感器设备的信息。列表li可以由区域a中的广播中心302广播,例如,通过移动通信网络300和/或经由区域a中的路侧单元202(或任何其它道路基础设施发送器)。广播中心302负责收集位于区域a中的车辆100上的雷达传感器设备400的雷达参数、保持所述雷达参数最新并周期地向区域a中的雷达传感器设备广播列表li。广播中心302存储区域中的雷达传感器设备400的在时间段i期间有效的列表li,并通过从区域a中的雷达传感器设备接收信息来周期性地更新列表。列表li包括在时间段i期间位于区域中的车辆100的雷达传感器设备400的并由广播中心302从区域a中的雷达传感器设备400收集的标识符。另外,针对各个雷达传感器设备400,列表li可以包括包含位置信息和移动信息的导航信息以及包括所述雷达传感器设备的当前雷达操作参数的雷达参数信息。
[0080]
在实施方式中,在步骤s2,雷达传感器设备400a例如通过v2v通信将指示其自身的操作雷达参数的雷达参数信息发送至其它连接的雷达传感器设备400a、400b。步骤s2可以在步骤s1之后和步骤s1期间执行。
[0081]
在可选步骤s3,雷达传感器设备400a还可以从第一雷达传感器设备400a执行的雷达测量中获得关于车辆100a的周围环境中的驾驶场景的信息。
[0082]
在步骤s4(可选的),雷达传感器设备400a还可以通过从没有通信能力的另一雷达传感器设备(例如,400d)接收雷达信号并分析接收到的雷达信号而获得雷达参数信息来获得另一雷达传感器设备400d的雷达参数信息。这允许雷达传感器设备400a获得附近没有通信能力的雷达传感器设备(例如,400d)的雷达参数信息。
[0083]
可选地,该过程还包括如下步骤s5:在雷达传感器设备400a处接收来自车辆100a
中的一个或更多个其它传感器(如摄像头、激光雷达、转速计或任何其它车辆传感器)的信息,以便获得关于车辆100a的周围环境中的驾驶场景的信息。
[0084]
所确定的关于车辆100a的周围环境中的驾驶场景的信息可以由雷达传感器设备400a存储。关于驾驶场景的信息可以以地图、图表、项目列表或驾驶场景的任何其它类型的表示的形式存储。
[0085]
在步骤s6,雷达传感器设备400a基于驾驶场景确定如何改变至少一个雷达参数以避免可能的雷达干扰。
[0086]
在实施方式中,雷达传感器设备400a可以从用于雷达干扰减轻的协作规则的数据库406中选择一个或更多个协作规则,这取决于在步骤s1、步骤s3、步骤s4和/或步骤s5获得的关于车辆100a的周围环境中的驾驶场景的信息。
[0087]
协作规则的数据库406包含用于雷达干扰减轻的协作规则集。协作规则是由多个雷达传感器设备400或一群雷达传感器设备400共享并由全部雷达传感器设备应用的预定义规则。协作规则允许多个雷达传感器设备以协作的方式设置用于雷达干扰减轻的雷达参数。协作规则限定了如何根据雷达传感器设备的当前情况在所述雷达传感器设备中设置雷达操作参数以减轻雷达干扰。各个协作规则可以限定为一对驾驶场景和在驾驶情况下采取的雷达干扰减轻措施:
[0088]
规则={驾驶场景,措施}
[0089]
给定的驾驶场景可以在不同的协作规则中与不同的措施相结合。
[0090]
协作规则的数据库可以被本地存储在雷达传感器设备400a的存储器406中,和/或车辆100a的车载网络中。另选地或另外地,协作规则可以远程存储(例如,存储在云基础设施中或服务器上的数据库中),并且由雷达传感器设备400a通过外部网络300访问。
[0091]
下面结合不同情况和/或驾驶场景给出例示性和非限制性协作规则:
[0092]
驾驶场景1:雷达传感器设备400a与其它雷达传感器设备之间无法协作
[0093]
在驾驶场景1中,雷达传感器设备400a使用从其它雷达传感器设备收集的关于雷达信号的信息,以通过信号处理来校正雷达干扰,并且不改变其雷达参数。
[0094]
驾驶场景2:车辆100a处于交通拥堵状态,并且雷达传感器设备400a受到另一雷达传感器设备的干扰
[0095]
在驾驶场景2中,雷达传感器设备400a可以应用降低发送功率电平和/或带宽δf和/或测量周期中的观察时间的协作规则。
[0096]
驾驶场景3:检测到指示限速的速度交通标志
[0097]
在驾驶场景3中,雷达传感器设备400a可以应用减小带宽δf和/或测量周期中的观察时间的协作规则。
[0098]
驾驶场景4:雷达传感器设备400a在其环境中发现非协作雷达传感器设备并识别其雷达调制参数
[0099]
在驾驶场景4中,雷达传感器设备400a可以应用以下协作规则中的一者:
[0100]
1)设置与干扰信号符号相反的频率斜坡斜率符号;
[0101]
2)设置与干扰信号的极化正交的极化;
[0102]
3)改变起始频率(换言之,时间偏移f0),以便避免干扰;
[0103]
4)基于估计干扰源的占空比,将信号与干扰同步,以便在可用时隙中发送雷达信
号。
[0104]
驾驶场景5:雷达传感器设备400a在其环境中发现非协作雷达传感器设备并且不识别其雷达调制参数
[0105]
在驾驶场景5中,雷达传感器设备400a可以应用以下协作规则中的一者:
[0106]
1)随机设置雷达传感器设备400a的频率斜坡斜率符号和/或起始频率(换言之,时间偏移f0);
[0107]
2)在干扰源雷达传感器设备进行发送的同时检测干扰信号并且不发送任何雷达信号。
[0108]
驾驶场景6:交通是顺畅的,并且检测到与在相反方向(与车辆100a的驾驶方向相反)上驾驶的另一车辆上的雷达传感器设备的雷达干扰
[0109]
在驾驶场景6中,雷达传感器设备400a使用基于车辆方向的干扰减轻策略,例如,根据车辆100a的方向选择极化或频率斜坡斜率符号。
[0110]
驾驶场景7:车辆100a已经进入保护无线电天文服务的国家无线电静默区
[0111]
在驾驶场景7中,雷达传感器设备400a可以应用降低发送功率电平和/或带宽δf和/或测量周期中的观察时间的协同规则。
[0112]
驾驶场景8:车辆100a已经加入车队(一起驾驶的一组车辆)
[0113]
在驾驶场景8中,雷达传感器设备400a可以应用降低发送功率电平和/或带宽δf和/或测量周期中的观察时间的协同规则。
[0114]
雷达传感器设备400a在步骤s1和/或可能在步骤s4确定关于车辆100a的周围环境中的驾驶场景的信息,并且然后,在步骤s6,它可以根据所确定的关于驾驶场景的信息选择给出雷达传感器设备400a要采取的雷达干扰减轻措施的协作规则。当在雷达传感器设备400a的当前驾驶场景中可能有不同的协作规则时,雷达传感器设备400a(例如,随机地)选择所述不同的协作规则中的一者。
[0115]
在步骤s7,雷达传感器设备400a根据在步骤s6进行的确定来改变至少一个雷达参数。在实施方式中,由雷达传感器设备400a选择的协作规则可以应用在步骤s7。这意味着由协作规则给出的雷达干扰减轻措施在雷达传感器设备400a中被激活。通常,在步骤s7,根据所选择的规则,在雷达传感器设备400a中激活新的雷达操作参数。
[0116]
在步骤s8,循环结束。
[0117]
包括步骤s0至步骤s8的循环可以在雷达传感器设备400a的各个测量周期执行,或者每n个测量周期周期地执行,其中,n≥2。
[0118]
另选地,可以连续、实时地执行步骤s1至步骤s7。
[0119]
图3示意性地示出了根据实施方式的具有通信能力的雷达传感器设备400a的功能框图。
[0120]
雷达传感器设备400a具有产生无线电或微波域中的电磁波(换言之:电磁信号)的发送器401、发送天线402、接收天线403、接收器404和用于基于所发送的雷达信号和所接收的雷达信号确定对象属性的处理器405。
[0121]
此外,在实施方式中,雷达传感器设备400a可以具有存储用于雷达干扰减轻的协作规则集的存储器406、用于与外部系统进行通信的通信接口407和用于雷达干扰减轻的组成部分408。
[0122]
在实施方式中,通信接口407是与车辆100中的车载网络进行接口连接的内部通信接口(在雷达传感器设备400a经由作为连接车辆的车辆100的无线通信信道与外部系统进行通信的情况下)。在另一实施方式中,通信接口406允许经由无线通信信道与车辆100外部的另一系统直接进行通信。
[0123]
在实施方式中,组成部分408是软件组成部分(换言之:计算机程序),其具有使雷达传感器设备400a执行先前限定的用于雷达干扰减轻的方法的步骤(即,由雷达传感器设备400a执行的步骤s0至步骤s8)。软件组成部分408在雷达传感器设备400a的处理器405上运行。软件组成部分(或计算机程序)408可以被存储在诸如易失性存储器(例如,rom、ram等)和/或非易失性存储器(例如,闪存、nand等)(即,永久或可移除地集成在雷达传感器设备中)的存储模块中,并且可以由处理器、计算机或计算器执行。
[0124]
本公开还涉及:
[0125]-存储有计算机程序或软件组成部分408的计算机可读介质;
[0126]-车辆100a,其包括至少一个雷达传感器设备,诸如,雷达传感器设备400a;
[0127]-包括如上限定的多个车辆的系统。
- 该技术已申请专利。仅供学习研究,如用于商业用途,请联系技术所有人。
- 技术研发人员:F
- 技术所有人:APTIV技术有限公司
- 我是此专利的发明人
- 该领域下的技术专家
- 如您需求助技术专家,请点此查看客服电话进行咨询。
- 1、邢老师:1.机械设计及理论 2.生物医学材料及器械 3.声发射检测技术。
- 2、王老师:1.数字信号处理 2.传感器技术及应用 3.机电一体化产品开发 4.机械工程测试技术 5.逆向工程技术研究
- 3、王老师:1.机器人 2.嵌入式控制系统开发
- 4、张老师:1.机械设计的应力分析、强度校核的计算机仿真 2.生物反应器研制 3.生物力学
- 5、赵老师:检测与控制技术、机器人技术、机电一体化技术
- 如您是高校老师,可以点此联系我们加入专家库。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
精彩留言,会给你点赞!
专利分类正在加载中....