一种基于双波长相位解调的矿井下人员定位系统
1.本发明属于煤矿井下安全生产监控技术领域,涉及一种人员定位系统,具体涉及一种基于相位光时域反射技术的双波长相位解调的矿井人员定位系统。
背景技术:
2.作为煤炭生产大国的中国,矿井安全事故时有发生,对于如何快速定位事故矿井中被困人员对煤矿的安全生产具有重要的意义。煤矿井下生产环境比较复杂,主要有矿井下电子电气设备需要具有的防尘、防爆、本质安全的安全生产要求。矿井下大量背景噪声(一方面如采煤机、输送机、破碎机和井下机车带来的机械噪声,另一方面是开关的闭合、大型机电设备启停和井下变电站运行带来的电磁噪声)的存在,以及应急救援时现场有无供电条件等,导致现有的人员定位系统如:uwb、super-rfid、zigbee、微功率和wifi等人员定位系统在矿井下使用时存在着一定的不足。基于光纤传感检测的人员定位系统由于其对电磁干扰的不敏感性以及无源的特点可以解决以上定位系统存在的问题。
3.由于井下的特殊环境,在设计人员定位系统时,往往不适合复杂的光纤传感系统,当井下瓦斯爆炸,塌方或透水等事故发生后,救援定位系统应能直接连接井下已有的光纤网络,做到迅速的人员定位,所以除了传感光纤(sensing fiber)部分外,其他设备均应由救援人员携带进去,因此比较简单高效的相干探测结构更能适应井下的生产环境和事故发生情况,除此之外相干探测结构还能够有效的减少噪声干扰。现有的井下光纤传感定位系统主要是采用基于相位光时域反射技术(φ-otdr)的分布式光纤人员定位系统,其主要原理为通过振动引起的光纤中瑞利反射光的相位变化,计算入射脉冲光与接收后向瑞利散射光的时间延迟来定位振动信号的位置。由于相位和时间之间的关系成三角函数关系,而三角函数本身具有的周期性使得解调相位得到的结果不一定是真实的振动信息,所以经常会出现定位误判。
4.由于相位具有三角函数的周期性,使得每经过π的整数倍点时,相位发生跳变,传统的相位解卷绕时,由于卷绕相位与主值相位之间的关系为,因此对相邻两点进行相位值比较,当相位出现跳变的时候,如果相邻两点的相位差值超过2π,将该点以及以后的各点的相位值均加上或减去2π且以使相邻采样点之间的差值在(-π,π)范围内,但该方法对相邻两点之间的最终补偿后的差值还超过2π或-2π,则传统的相位解卷绕方法将失效,这时会产生定位误报信息。
5.研究发现,采用波长比较长的激光源时,产生跳变的时间间隔也响应变长,因此可以利用现有的光纤激光源,通过数字全息技术中的双波长相位解调方法,获得较大的合成波长,以避免相位卷绕问题,得到准确的相位分布。
技术实现要素:
6.本发明的目的是提供一种基于双波长相位解调的矿井下人员定位系统,在矿井事故发生后,被困人员敲击矿井壁,救援人员利用矿井中原有的光纤网络来进行快速准确的
定位,通过系统中双波长相位解调结果剔除位置误报信息,再通过单波长相位解调结果得到精确的定位信息。
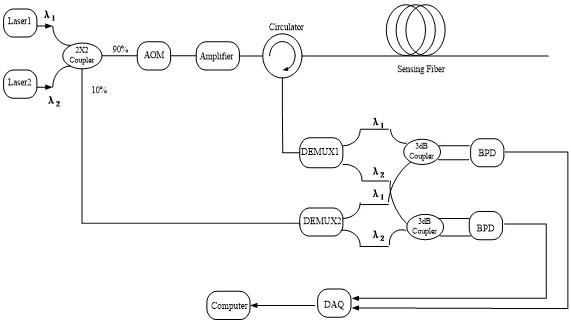
7.本发明的目的是通过以下技术方案实现的:一种基于双波长相位解调的矿井下人员定位系统,包括二极管激光源、耦合器、声光调制器、掺饵光纤放大器、环形器、分波器1、分波器2、传感光纤、耦合器1、耦合器2、光电平衡探测器1、光电平衡探测器2、高速数据采集卡和计算机,其中:所述入射激光源产生波长1和波长2两种波长不同的入射光,经过耦合器分成两路,一路为参考光,一路为探测光;所述探测光进入探测臂,经过声光调制器后再由掺饵光纤放大器放大后,经环形器进入传感光纤,瑞利反射光通过传感光纤回到环形器后进入分波器1分出波长不同的波长1和波长2两路光,波长1的光进入耦合器1,波长2的光进入耦合器2;所述参考光进入参考臂,经分波器2分出波长不同的波长1和波长2两路光,波长1的光进入耦合器1,波长2的光进入耦合器2;所述探测臂中的瑞利反射光和参考臂中的参考光进入耦合器1和耦合器2,分别经过π/2相移后耦合,进入光电平衡器探测器1和光电平衡器探测器2,在光电平衡器探测器1和光电平衡器探测器2中转换为光电流并得到差值;所述光电平衡器探测器1和光电平衡器探测器2的输出经过高速数据采集卡进入计算机进行相干解调,得到波长1和波长2的相位,由波长1和波长2的相位做减法得到合成相位,三个相位结果分别做相位解卷绕,得到相位与距离的相位曲线;当有振动发生时,瑞利反射光的相位发生扰动,这时的相位曲线与原来的曲线在扰动位置的相位信息会发生变化,通过多次曲线叠加就能得到具体的扰动位置信息。
8.本发明中,所述波长1和波长2需要满足矿井防尘防爆本质安全的要求,波长越接近越好,例如:波长1为1310nm,波长2为1550nm。
9.相比于现有技术,本发明具有如下优点:1、利用二极管激光源产生1310nm和1550nm两种波长的入射光,经过耦合器(coupler)分成两路,一路为参考光,一路为探测光,其中探测光功率较强,占90%,这样可以提升瑞利反射光的强度。
10.2、采用掺饵光纤放大器(edfa)进一步提升功率进入环形器(circulator),并进入到传感光纤(sensing fiber)中。
11.3、利用分波器(demux)对合成光波进行波长分离,可以同时得到单波长相位和双波长相位信息。
12.4、利用光电平衡探测器(bpd)对相位信息进行相干解调,除此之外,bpd还能够有效去除噪声。
13.5、通过高速数据采集卡(daq)来实时采集并解调传感光纤中的振动信息。
14.6、所有数据最终由计算机处理,需要对数字低通滤波器带来的定位滞后进行补偿,最终得到相位与定位距离之间的关系。
附图说明
15.图1为双波长矿井人员定位系统的结构框图,1-1310nm激光源(laser1),2-1550nm
激光源(laser2),3-2
×
2耦合器(2
×
2coupler),4-声光调制器(aom),5-掺饵光纤放大器(amplifier),6-环形器(circulator),7-分波器1(demux1),8-分波器2(demux2),9-传感光纤(sensing fiber),10-3db耦合器1(3dbcoupler1),11-3db耦合器2(3dbcoupler2),12-光电平衡探测器1(bpd1),13-光电平衡探测器2(bpd2),14-高速数据采集卡(daq),15-计算机(computer);图2为bpd工作原理图,16-二极管1,17-二极管2,18-跨阻放大器,19-运算放大器;图3为位置判断流程图;图4为多次相位解调后的定位误差累积分布曲线。
具体实施方式
16.下面结合附图对本发明的技术方案作进一步的说明,但并不局限于此,凡是对本发明技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围中。
17.本发明提供了一种基于双波长相位解调的矿井下人员定位系统,如图1所示,所述定位系统包括入射激光源、2
×
2耦合器、声光调制器、掺饵光纤放大器、环形器、分波器1、分波器2、传感光纤、3db耦合器1、3db耦合器2、光电平衡探测器1、光电平衡探测器2、高速数据采集卡和计算机,其中:所述入射激光源采用二极管激光源,波长分别为1310nm和1550nm,1310nm激光源和1550nm激光源经过2
×
2耦合器分别进入探测臂和参考臂;所述探测臂的探测光占入射功率的90%,入射光经过声光调制器后再由掺饵光纤放大器放大后,经环形器进入原有的矿井光纤网络中(传感光纤),瑞利反射光通过传感光纤回到环形器后进入分波器1分出波长不同的两路光,波长为1310nm的光进入3db耦合器1,波长为1550nm的光进入3db耦合器2;所述参考臂的参考光占入射功率的10%,入射光经分波器2分出波长不同的两路光,波长为1310nm光进入3db耦合器1,波长为1550nm光进入3db耦合器2;所述探测臂中的瑞利反射光和参考臂中的参考光进入3db耦合器1和3db耦合器2,分别经过π/2相移后耦合,进入光电平衡器探测器1和光电平衡器探测器2,在光电平衡器探测器1和光电平衡器探测器2中转换为光电流并得到差值;所述光电平衡器探测器1和光电平衡器探测器2的输出经过高速数据采集卡进入计算机进行相干解调,得到1310nm波长和1550nm波长的相位,由1310nm波长和1550nm波长的相位做减法就得到合成相位,三个相位结果分别做相位解卷绕就能得到相位与距离的相位曲线;当有振动发生时,瑞利反射光的相位发生扰动,这时的相位曲线与原来的曲线在扰动位置的相位信息会发生变化,通过多次曲线叠加就能得到具体的扰动位置信息(扰动会产生相位变化,非扰动处相位基本不变)。
18.经过多次实验发现,在相干解调时用到的高阶低通数字滤波器会对定位信息产生滞后影响,具体影响与滤波器的阶数正相关,经过程序的滞后补偿后,得到正确的定位信息。
19.合成波长的定位信息会和两种单波长的定位信息比较,误差值在50米范围内的,采用单波长定位信息,因为波长越小定位准确度越精确。如果误差在50米以外,则采用合成
波长的定位信息,因为合成波长减少了因为相位解卷绕带来的误报信息。
20.本发明中,bpd工作原理如图2所述。
21.本发明中,位置判断流程如图3所示。
22.为了验证双波长矿井人员定位系统的性能,特设计了相关实验。利用圆筒压电陶瓷(pzt)作为外界振动源,模仿放置在光纤探测臂1100m的位置上,模拟井下人员敲击矿井墙壁振动,光缆缠绕pzt距离为3米,用来模拟矿井壁的振动范围。光源采用的是激光二极管,波长分别是1310nm和1550nm。
23.定位误差在10米以内,可以认定为精确定位,定位误差在10米到30米范围,可以认定为满足一般需求的定位测量,当定位误差超过30米之后,一般认为定位信息为误报信息。从图4中可以发现,定位误差在20米范围之内,单波长相位解调占有明显优势,双波长解调的定位信息误差较大,在三十米定位误差范围内,双波长相位解调误报定位明显占有优势。具体数据信息如表1所示。
24.表1 两种相位解调方式的误差比从表1中可以看出,由于pzt缠绕3米的光纤,用来模拟矿井壁受敲击振动的情况,所以定位误差在三米之内的两种解调方式的准确度均比较小,尤其是双波长相位解调定位准确度仅为18.24%,定位误差在10米之内时,可以看出单波长相位解调占有明显优势,其定位准确度为71.22%。当定位误差要求在20米之内时,两种解调方式的准确度比较接近,单波长解调方式为90.34%,双波长解调方式为91.78%。当定位误差要求在30米时,可以看到双波长定位准确度明显高于单波长,而此时双波长定位的准确度达到了98.87%。当定位误差在超过30米时,这时的定位信息可以被看作是误报信息,此时,单波长定位有7%的误报率,而双波长仅为1%。由于增加了分波器,耦合器和光电平衡器,所以双波长定位系统在定位时间上要稍慢于单波长定位系统,但在实际工程应用中,这样的时间差不会影响到具体的使用效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1