一种基于多相机测量系统的航空导管弯曲段测量方法与流程
1.本发明涉及航空导管测量领域,具体是一种基于多相机测量系统的航空导管弯曲段测量方法。
背景技术:
2.航空导管作为目前在航空航天领域应用十分广泛的重要组成零件,其稳定性直接关系到产品的性能和生命周期,航空导管问题很容易导致产品出故障或报废。为更好地保证航空导管质量,需对航空导管进行检测工作。
3.基于近景摄影测量原理的多相机航空导管测量系统,可实现导管的直线段和弯曲段的识别和测量。现今广泛应用的有两种方法1、航空导管参数未知:通过构造不同参数的圆柱体模型,根据测量搜索圆柱拟合的方式,实现航空导管直线段和弯曲段的测量;2、航空导管参数已知:根据导管直线段和弯曲段的参数构造航空导管模型,结合采集图像进行边缘拟合的方式解算出航空导管参数,完成导管测量。
4.实际测量过程中,多数航空导管的管径均匀、无明显变化,无明显纹理特征,因而无法使用特征提取的方式进行测量。而受相机视角影响,在不同相机位置下所测得的航空导管形态也会有所不同,对于航空导管的结构测量,有必要对图像数据进一步处理,实现航空导管各部分进行分段式测量。
5.实际航空导管的弯曲段由于受两侧直线段应力影响,经图像采集、处理后,使用拟合的弯曲段圆柱,直接解算导管的弯曲半径,所得到的弯曲半径比实际值大。而弯曲半径是航空导管测量过程中不可或缺的工艺参数。弯曲半径的有效测量对航空导管检测有着十分重要的作用。即当前的航空导管测量方法虽可完成整体航空导管的测量工作,但在实际测量过程中,没有对航空导管的直线段和弯曲段部分的测量有明确的区分方法,因而航空导管的测量结果与生产工艺参数有差距。
技术实现要素:
6.为了解决上述问题,本发明提出一种基于多相机测量系统的航空导管弯曲段测量方法。
7.一种基于多相机测量系统的航空导管弯曲段测量方法,其具体步骤如下:
8.s1、采集图像:采用多相机测量系统作为图像采集装置,使用表面粘有编码点的平面靶标对测量系统进行标定,解算出相机的内外参数以及镜头畸变参数;
9.s2、边缘提取:根据采集到的导管图像,先对采集到的图像进行降噪处理再用图像灰度分布梯度值反映,在确定好航空导管的边缘区域后,找出航空导管各个截面圆的圆心位置,以此拟合出航空导管的中心轴线位置;
10.s3、三维重建:在航空导管的中心轴线上,选择一条长度固定的线段,以航空导管外边缘为界,构建出一个端面直径与管径相同的圆柱模型;
11.s4、定位弯曲段:利用直线段斜率关系,引入相邻圆柱的中轴线夹角θ,自航空导管
一侧端面开始向另一端面检索,以轴线的斜率变化关系,确定航空导管弯曲段位置;
12.s5、拟合空间圆:根据采集、筛选到的弯曲段轴线附近离散点坐标,使用最小二乘法去拟合空间圆,解算出弯曲段的弯曲半径;
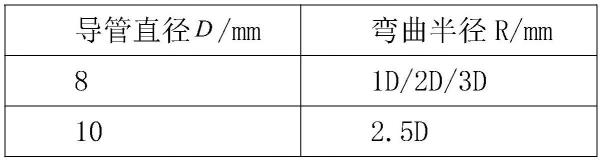
13.s6、半径修正:受生产工艺影响,工程中导管的弯曲半径r与航空导管直径d存在倍数关系,为实际测量r值更贴近工艺参数要求,可按照相应表格比对实际测量r值,找出测量值最接近的弯曲半径r,将测量数值r修正为所对应的弯曲半径r值。
14.所述的步骤s1中,用已标定的多相机系统采集导管图像,测量时将导管放在测量平面上的中心位置,拍摄10-15张图片。
15.所述的步骤s2中,实际采样到的航空导管边缘轮廓根据灰度变化提取航空导管边缘,图像中各像素点中的灰度变化,用图像灰度分布梯度值来反映,即通过对局部图像微分的技术获取航空导管边缘,边界部分多为灰度值出现突变的位置。
16.所述的步骤s3中,以此模型为准,在轴线方向上,拟合、衍生出很多个与该圆柱模型参数相一致的圆柱。
17.所述的步骤s4中,确定航空导管弯曲段位置,通过解析几何中两点确定一条直线可知,因此相邻两圆柱间的位置关系可通过轴线夹角θ来表示,具体方法如下:
18.以圆柱s1和圆柱s2为例,c点时两圆柱中心轴线的交点,其中两圆柱间的位置关系可通过下式表示:
[0019][0020]
其中θ为两个圆柱的中心轴线向量的夹角,分别为圆柱a和圆柱b的中轴线的方向向量,图像中阴影部分,为实际航空导管的3个弯曲段位置,航空导管上各个位置的斜率与其在航空导管上的长度位置有所关联。
[0021]
所述的步骤s5中,使用最小二乘法去拟合空间圆,具体方法如下:
[0022]
以弯曲段中心轴线附近各点拟合圆,假定最终拟合圆心为o(a,b),弯曲半径为r,圆上任一点p(x,y)则空间圆方程可用下式表示:
[0023]
r2=(x-a)2+(y-b)2。
[0024]
本发明的有益效果是:本发明引入了在使用多相机系统测量的基础上,采用边缘提取、三维重建、斜率定位,空间圆拟合、半径修正的方法,实现了航空导管弯曲段的弯曲半径测量工作,提供了更为有效的航空导管弯曲半径测量数据,提高了航空导管测量的精度。
附图说明
[0025]
下面结合附图和实施例对本发明进一步说明。
[0026]
图1为本发明的航空导管弯曲段测量流程示意图;
[0027]
图2为本发明的航空导管采集示意图;
[0028]
图3为本发明的航空导管边缘图像示意图;
[0029]
图4为本发明的三维重建后管型示意图;
[0030]
图5为本发明的邻圆柱夹角关系示意图示意图;
[0031]
图6为本发明的检测航空导管上弯曲段位置示意图;
[0032]
图7为本发明的曲段圆弧各点拟合圆示意图示意图;
[0033]
图8为本发明的航空导管灰度后边缘图像示意图;
[0034]
图9为本发明的航空导管上各个位置的斜率与其在航空导管上的长度位置关系示意图;
[0035]
图10为本发明的轴线附近离散点拟合圆示意图。
具体实施方式
[0036]
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
[0037]
如图1至图10所示,一种基于多相机测量系统的航空导管弯曲段测量方法,其具体步骤如下:
[0038]
s1、采集图像:采用多相机测量系统作为图像采集装置,使用表面粘有编码点的平面靶标对测量系统进行标定,解算出相机的内外参数以及镜头畸变参数;
[0039]
s2、边缘提取:根据采集到的导管图像,先对采集到的图像进行降噪处理再用图像灰度分布梯度值反映,在确定好航空导管的边缘区域后,找出航空导管各个截面圆的圆心位置,以此拟合出航空导管的中心轴线位置;
[0040]
s3、三维重建:在航空导管的中心轴线上,选择一条长度固定的线段,以航空导管外边缘为界,构建出一个端面直径与管径相同的圆柱模型;
[0041]
s4、定位弯曲段:利用直线段斜率关系,引入相邻圆柱的中轴线夹角θ,自航空导管一侧端面开始向另一端面检索,以轴线的斜率变化关系,确定航空导管弯曲段位置;
[0042]
s5、拟合空间圆:根据采集、筛选到的弯曲段轴线附近离散点坐标,使用最小二乘法去拟合空间圆,解算出弯曲段的弯曲半径;
[0043]
s6、半径修正:受生产工艺影响,工程中导管的弯曲半径r与航空导管直径d存在倍数关系,为实际测量r值更贴近工艺参数要求,可按照下表比对实际测量r值,找出测量值最接近的弯曲半径r,将测量数值r修正为所对应的弯曲半径r值,表格如下:
[0044][0045][0046]
所述的步骤s1中,用已标定的多相机系统采集导管图像,测量时将导管放在测量平面上的中心位置,拍摄10-15张图片,具体采集图像示例如下图2所示。
[0047]
本发明引入了在使用多相机系统测量的基础上,采用边缘提取、三维重建、斜率定位,空间圆拟合、半径修正的方法,实现了航空导管弯曲段的弯曲半径测量工作,提供了更为有效的航空导管弯曲半径测量数据,提高了航空导管测量的精度。
[0048]
所述的步骤s2中,实际采样到的航空导管边缘轮廓如下图3所示,图8为根据灰度
变化所提取处的航空导管边缘,图像中各像素点中的灰度变化,用图像灰度分布梯度值来反映,即通过对局部图像微分的技术获取航空导管边缘,边界部分多为灰度值出现突变的位置。
[0049]
所述的步骤s3中,以此模型为准,在轴线方向上,拟合、衍生出很多个与该圆柱模型参数相一致的圆柱,具体图例如图4所示。
[0050]
所述的步骤s3重建得到的小圆柱虽长度、直径都是固定值,但仍不能精确分区测量航空导管的直线段和弯曲段,因此需要根据步骤s4确定航空导管弯曲段位置。
[0051]
所述的步骤s4中,确定航空导管弯曲段位置,通过解析几何中两点确定一条直线可知,因此相邻两圆柱间的位置关系可通过轴线夹角θ来表示,具体方法如下:
[0052]
以圆柱s1和圆柱s2为例,c点时两圆柱中心轴线的交点,其中两圆柱间的位置关系可通过下式表示:
[0053][0054]
其中θ为两个圆柱的中心轴线向量的夹角,分别为圆柱a和圆柱b的中轴线的方向向量,下图6中阴影部分,为实际航空导管的3个弯曲段位置,航空导管上各个位置的斜率与其在航空导管上的长度位置之间的如图9所示。
[0055]
由图中变化关系可知,图中斜率分别在3个弯曲点处出现波峰,航空导管上各点越靠近波峰位置,斜率越大,反之越小;因此可以此变化规律,给定弯曲段阈值,斜率超出阈值以上对应的航空导管长度即为弯曲段。
[0056]
所述的步骤s5中,以下图7为例,图中位置1为航空导管的第一个弯曲段,使用最小二乘法去拟合空间圆,具体方法如下:
[0057]
如上图10所示,以弯曲段中心轴线附近各点拟合圆,假定最终拟合圆心为o(a,b),弯曲半径为r,圆上任一点p(x,y)则空间圆方程可用下式表示:
[0058]
r2=(x-a)2+(y-b)2。
[0059]
通过大量实验数据验证,本发明提出的测量方法能够实现对航空导管弯曲段准确测量,为基于多相机测量系统的航空导管测量提供了关键技术支撑,为航空导管快速精确测量提供了技术途径。
[0060]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1