一种实际环境下低慢小圆周扫描雷达探测最大距离图获取方法与流程
1.本发明属于雷达探测技术领域,具体涉及一种实际环境下低慢小圆周扫描雷达探测最大距离图获取方法。
背景技术:
2.低慢小雷达用于探测低空飞行的鸟、无人机等物体。雷达探测最大距离作为雷达探测能力的最直接体现,是雷达最重要的技术指标之一。
3.目前雷达最大探测距离的获取方法有几种。一种方法是利用雷达方程,根据雷达发射机、接收机、天线和信号处理以及探测目标(鸟、无人机)的雷达截面积等技术指标直接计算得到雷达最大探测距离,这种方法得到的最大探测距离是理论上的;第二种方法是在检飞场,通过飞机对雷达进行多批次检飞,获取到雷达数据后,对雷达数据进行分析,得到雷达最大探测距离。
4.预警雷达一般都是圆周扫描雷达。对于圆周扫描雷达,在检飞时,需要在多个密集方向上进行径向飞行。比如,间隔5
°
进行径向飞行,要完整覆盖整个空域,需要在72个方向上飞行,且每个方向上要飞行多次。这样造成检飞成本很高。
5.专利号为cn200810066149.4的一种雷达ppi图像像素的更新方法,通过对扫描重合的模块,决定对该像素多次扫描收到的回波数据进行适当处理,充分利用多次扫描的回波数据信息,改善雷达视频信噪比,解决了雷达距离近区的像素单元在多次被重复扫描时,回波数据出现偏差的问题。
6.专利号为cn202010105096.3的一种无人机机载雷达地面扫描覆盖区域计算方法,针对一种具有圆锥状扫描范围的机载雷达,提出了其地面扫描覆盖区域地理位置的计算方法,可以实现雷达在任意扫描角度时地面扫描覆盖区域的计算。
7.本发明提出了一种可以有效降低检飞成本,以较低的试验数据获取雷达最大探测距离的方法。
技术实现要素:
8.针对上述背景技术所提出的问题,本发明的目的是:旨在提供一种实际环境下低慢小圆周扫描雷达探测最大距离图获取方法。
9.为实现上述技术目的,本发明采用的技术方案如下:
10.一种实际环境下低慢小圆周扫描雷达探测最大距离图获取方法,包括下述步骤:
11.s1.根据下式,计算雷达的探测范围(pd=0.8,σ=0.0025m2)
[0012][0013]
上式中:所有单位均是标准单位,
[0014]rmax
——自由空间雷达最大探测距离,单位m
[0015]
p
t
——发射机的平均功率,单位kw
[0016]gt
——发射天线增益,单位db
[0017]gr
——接收天线增益,单位db
[0018]
c——电磁传播速度,取c=3*108m/s
[0019]
σ——目标的雷达截面积,单位m2
[0020]
pd——目标检测概率,通常80%
[0021]smin
——接收机最小可检测信号功率,或者制接收敏感设备的敏感门限,单位dbw
[0022]
f——雷达工作频率mhz;
[0023]
s2.以雷达为中心,规划无人机航线,航线围绕最远探测距离r
max
做蛇形圆圈运动,若雷达理论探测距离为r
max
米,则无人机围绕r
max
米的圆心做蛇形机动飞行,蛇形机动的径向距离可取理论雷达探测距离的r
max
10%左右,蛇形机动的峰峰距离取理论雷达探测距离的5%到10%,记r
max_old
=r
max
;
[0024]
s3.雷达开机;
[0025]
s4.设定无人机飞行高度为h0;
[0026]
s5.无人机按照规划的航线飞行,无人机保持匀速飞行,飞行速度保持在5米/秒左右;
[0027]
s6.无人机飞行的同时,记录雷达探测到无人机轨迹点数据;
[0028]
s7.统计每个扇区内雷达航迹点数n
‘i,记录无人机飞越每个扇区的时间为ti秒,雷达天线的扫描转速为ω转/分钟,记ni=floor(60ti/ω)。floor为向下取整;
[0029]
s8.区分不同情况,调整无人机飞行距离:
[0030]
第一种情况:若该扇区雷达航迹点数少于0.8
×
ni,即0.8
×
ni》n
‘i,则增加无人机的飞行距离至r’max_next
,执行第(6)步;
[0031]
r’max_next
=110%
×rmax_old
[0032]rmax_old
=r'
max_next
[0033]
第二种情况:若该扇区雷达航迹点数大于0.9
×
ni,即0.9
×
ni《n
‘i,则减少无人机的飞行距离至r’max_next
,执行第(6)步;
[0034]
r’max_next
=90%
×rmax_old
[0035]rmax_old
=r'
max_next
[0036]
第三种情况:若该扇区雷达航迹点数位于0.8
×
ni和0.9
×
ni之间,即0.8
×
ni《n
‘i《0.9
×
ni,则执行第(9)步;
[0037]
s9.将雷达上记录的无人机航迹点进行整理,记为
[0038]
{[ρ0,r0],[ρ1,r1],
……
,[ρm,rm]}
[0039]
s10.将雷达水平空域按照6
°
的角度进行均匀划分,在每个角度内取的航迹点,取距离最大的航迹点,若该角度内无航迹点,则取相邻角度区域内的最大航迹点,这样得到航迹点序列:
[0040]
{[ρ0,r0],[ρ1,r1],
……
,[ρ
59
,r
59
]}
[0041]
s11.根据下式,在0到360度范围内,计算任意一个角度的雷达探测距离:p(t)=b1p
i-2
+b2p
i-1
+b3pi+b4p
i+1
[0042]
pi=[ρi,ri]
[0043]
其中,t=ρ
i-1
+u(ρ
i-ρ
i-1
),u∈[0,1]
[0044]
b1=0.5
×
(-t3+2t
2-t)
[0045]
b2=0.5
×
(3t
3-5t2+2)
[0046]
b3=0.5
×
(-3t3+4t2+t)
[0047]
b1=0.5
×
(t
3-t2)
[0048]
s12.将0到360度的数据的最大探测区域绘制出来,得到高度为h0时的雷达威力图;
[0049]
s13.改变无人机高度hi,重复s5到s12,则得到任意高度雷达探测距离图。
[0050]
进一步限定,所述s5中,若无人机电量不足,可再降落换电池后继续在原降落点起飞。
[0051]
进一步限定,所述s8中,通过反复调整无人机与雷达之间的飞行航线,使得雷达探测航迹点数满足0.8
×
ni《n
‘i《0.9
×
ni,调整时,无人机航线的形状不能任意改变,需始终模拟蛇形机动,调整参数为,蛇形机动中心线与雷达中心点之间的径向距离,而不是蛇形机动的幅度。
[0052]
本发明的有益效果:
[0053]
1.相较于专利号为cn200810066149.4的申请,本发明以雷达方程为基础规划若干特定飞行航线,设定遥控无人机在编辑的航线飞行,同时雷达实时探测飞行航线上的无人机,通过分析雷达探测到的航迹数据,获得雷达的探测威力,主要解决了以下问题:低空环境下雷达最大探测距离的低成本、快速获取问题;
[0054]
2.相较于专利号为cn202010105096.3的申请,可以利用理论计算数值和简单的飞行航线,得到雷达对无人机的最大探测距离曲线;
[0055]
3.方法简单,计算量低;
[0056]
4.实施成本低。
附图说明
[0057]
本发明可以通过附图给出的非限定性实施例进一步说明;
[0058]
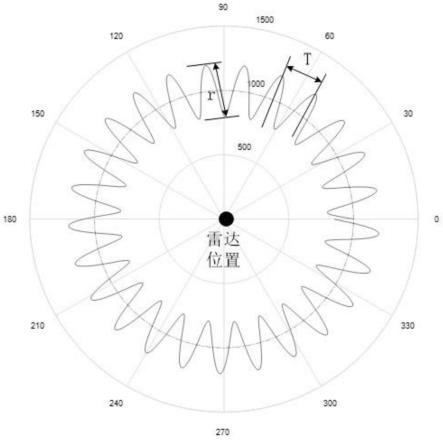
图1为本发明一种实际环境下低慢小圆周扫描雷达探测最大距离图获取方法实施例中无人机飞行曲线(蛇形曲线)与雷达理论探测曲线(圆形)平面图的结构示意图;
[0059]
图2为本发明一种实际环境下低慢小圆周扫描雷达探测最大距离图获取方法实施例中的雷达威力图。
具体实施方式
[0060]
为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
[0061]
如图1-2所示,本发明的一种实际环境下低慢小圆周扫描雷达探测最大距离图获取方法,,包括下述步骤:
[0062]
s1.根据下式,计算雷达的探测范围(pd=0.8,σ=0.0025m2)
[0063]
[0064]
上式中:所有单位均是标准单位,
[0065]rmax
——自由空间雷达最大探测距离,单位m
[0066]
p
t
——发射机的平均功率,单位kw
[0067]gt
——发射天线增益,单位db
[0068]gr
——接收天线增益,单位db
[0069]
c——电磁传播速度,取c=3*108m/s
[0070]
σ——目标的雷达截面积,单位m2
[0071]
pd——目标检测概率,通常80%
[0072]smin
——接收机最小可检测信号功率,或者制接收敏感设备的敏感门限,单位dbw
[0073]
f——雷达工作频率mhz;
[0074]
s2.以雷达为中心,规划无人机航线,航线围绕最远探测距离r
max
做蛇形圆圈运动,若雷达理论探测距离为r
max
米,则无人机围绕r
max
米的圆心做蛇形机动飞行,蛇形机动的径向距离可取理论雷达探测距离的r
max
10%左右,蛇形机动的峰峰距离取理论雷达探测距离的5%到10%,记r
max_old
=r
max
;
[0075]
s3.雷达开机;
[0076]
s4.设定无人机飞行高度为h0;
[0077]
s5.无人机按照规划的航线飞行,无人机保持匀速飞行,飞行速度保持在5米/秒左右;
[0078]
s6.无人机飞行的同时,记录雷达探测到无人机轨迹点数据;
[0079]
s7.统计每个扇区内雷达航迹点数n
‘i,记录无人机飞越每个扇区的时间为ti秒,雷达天线的扫描转速为ω转/分钟,记ni=floor(60ti/ω)。floor为向下取整;
[0080]
s8.区分不同情况,调整无人机飞行距离:
[0081]
第一种情况:若该扇区雷达航迹点数少于0.8
×
ni,即0.8
×
ni》n
‘i,则增加无人机的飞行距离至r’max_next
,执行第(6)步;
[0082]
r’max_next
=110%
×rmax_old
[0083]rmax_old
=r'
max_next
[0084]
第二种情况:若该扇区雷达航迹点数大于0.9
×
ni,即0.9
×
ni《n
‘i,则减少无人机的飞行距离至r’max_next
,执行第(6)步;
[0085]
r’max_next
=90%
×rmax_old
[0086]rmax_old
=r'
max_next
[0087]
第三种情况:若该扇区雷达航迹点数位于0.8
×
ni和0.9
×
ni之间,即0.8
×
ni《n
‘i《0.9
×
ni,则执行第(9)步;
[0088]
s9.将雷达上记录的无人机航迹点进行整理,记为
[0089]
{[ρ0,r0],[ρ1,r1],
……
,[ρm,rm]}
[0090]
s10.将雷达水平空域按照6
°
的角度进行均匀划分,在每个角度内取的航迹点,取距离最大的航迹点,若该角度内无航迹点,则取相邻角度区域内的最大航迹点,这样得到航迹点序列:
[0091]
{[ρ0,r0],[ρ1,r1],
……
,[ρ
59
,r
59
]}
[0092]
s11.根据下式,在0到360度范围内,计算任意一个角度的雷达探测距离:p(t)=
b1p
i-2
+b2p
i-1
+b3pi+b4p
i+1
[0093]
pi=[ρi,ri]
[0094]
其中,t=ρ
i-1
+u(ρ
i-ρ
i-1
),u∈[0,1]
[0095]
b1=0.5
×
(-t3+2t
2-t)
[0096]
b2=0.5
×
(3t
3-5t2+2)
[0097]
b3=0.5
×
(-3t3+4t2+t)
[0098]
b1=0.5
×
(t
3-t2)
[0099]
s12.将0到360度的数据的最大探测区域绘制出来,得到高度为h0时的雷达威力图;
[0100]
s13.改变无人机高度hi,重复s5到s12,则得到任意高度雷达探测距离图。
[0101]
优选,s5中,若无人机电量不足,可再降落换电池后继续在原降落点起飞。
[0102]
优选,s8中,通过反复调整无人机与雷达之间的飞行航线,使得雷达探测航迹点数满足0.8
×
ni《n
‘i《0.9
×
ni,调整时,无人机航线的形状不能任意改变,需始终模拟蛇形机动,调整参数为,蛇形机动中心线与雷达中心点之间的径向距离,而不是蛇形机动的幅度。
[0103]
本案实施中,
[0104]
第一.通过雷达计算公式;
[0105][0106]
计算出雷达的探测范围;
[0107]
第二.以雷达为中心,规划无人机航线,航线围绕最远探测距离r
max
做蛇形圆圈运动;
[0108]
第三.雷达开机;
[0109]
第四.设定无人机飞行高度为h0;
[0110]
第五.无人机按照规划的航线飞行,无人机保持匀速飞行,飞行速度保持在5米/秒左右;
[0111]
第六.飞行的同时,记录雷达探测到无人机轨迹点数据;
[0112]
第七.统计每个扇区内雷达航迹点数n
‘i,记录无人机飞越每个扇区的时间为ti秒,雷达天线的扫描转速为ω转/分钟;
[0113]
第八.区分不同情况,调整无人机飞行距离,从而保证扇区雷达航迹点数位于0.8
×
ni和0.9
×
ni之间;
[0114]
第九.整理雷达上记录的无人机航迹点;
[0115]
第十.将雷达水平空域按照6
°
的角度进行均匀划分,在每个角度内取的航迹点,取距离最大的航迹点,若该角度内无航迹点,则取相邻角度区域内的最大航迹点,得到航迹点序列;
[0116]
第十一.计算任意一个角度的雷达探测距离;
[0117]
第十二.将0到360度的数据的最大探测区域绘制出来,得到雷达威力图;
[0118]
第十三.改变无人机高度hi,重复第五到第十二,则得到任意高度雷达探测距离图;
[0119]
本发明以雷达方程为基础规划若干特定飞行航线,设定遥控无人机在编辑的航线
飞行,同时雷达实时探测飞行航线上的无人机,通过分析雷达探测到的航迹数据,获得雷达的探测威力,主要解决了以下问题:低空环境下雷达最大探测距离的低成本、快速获取问题,并且该方法可以利用理论计算数值和简单的飞行航线,得到雷达对无人机的最大探测距离曲线,方法简单,计算量低,实施成本低。
[0120]
上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1