一种基于量子纠缠光的二维平面定位系统及方法
1.本发明涉及一种基于量子纠缠光的二维平面定位系统及方法,属于量子导航定位技术领域。
背景技术:
2.测距技术是实现未知目标物定位与导航的基础,定位系统的测距精度决定了其定位精度。传统测距技术,比如超声波测距、红外测距以及激光测距等均是基于经典物理的测距技术,其测距精度始终受限于标准量子极限,不能满足高精度定位的需求。为了获得更高的定位精度,必须寻求一种能够突破标准量子极限的新型测距技术。随着量子理论的建立,量子力学逐渐深入到物理实验中,量子纠缠光的二阶关联特性在测量方面的优势日渐凸显。相关理论实验研究表明,基于量子纠缠光的测距系统能够突破散粒噪声极限的限制,使测量精度降低到海森堡极限,为实现高精度定位提供了新的技术支撑。
3.基于量子纠缠光的测距技术通过向待测点发射纠缠光子并耦合接收反射信号,利用符合计数测量的方法获得纠缠光子对的到达时间差,然后根据该时间差求解出距离信息。在测量过程中,量子信号耦合效率的高低决定了纠缠光子对符合计数值的大小,进而影响符合测量曲线的信噪比及符合测量精度。因此,实现纠缠光子对的快速高效耦合至关重要。纠缠光子信号通常处于不可见波段,并且信号强度处于单光子级别,肉眼无法识别。为了高效快速地进行信号的耦合接收,对测距系统增加处于可见光波段的辅助定位模块是必不可少的。
4.当定位系统中只有一个测量源时,为了实现目标点的二维定位,在已知待测点距离信息的基础上仍需获得目标点在已知坐标系中的方位角信息。当前常用的方法是将测量装置放置在转台上进行整体旋转来获得方位角,例如申请公布号为cn112904351a的中国专利申请文件,该文件公开了一种基于量子纠缠光关联特性的单源定位方法,该方法将量子纠缠源收发探测装置放置在转台上,在转台转动过程中不断发射信号光子对目标进行探测,当符合计数值达到最大值时,记录此时信号光子发射方向与基准方向之间的角度,并将其作为待定目标与本地接入点之间的夹角,结合待定位目标的距离信息即可实现目标的定位。该方法虽然能够实现二维平面的定位,但是需要借助与转台,当探测装置体积较大时,具体操作过程不够便捷,且容易出现误差。
技术实现要素:
5.本发明的目的是提供一种基于量子纠缠光的二维平面定位系统及方法,以解决目前量子纠缠光的二维平面定位存在的操作复杂、测量不够方便的问题。
6.本发明为解决上述技术问题而提供一种基于量子纠缠光的二维平面定位系统,该定位系统包括纠缠光子对发生器、分束器、第一单光子探测器、第二单光子探测器、时间数字转换器、符合计数测量模块、参考光源、辅助定位装置和四象限探测器;所述纠缠光子对发生器用于产生纠缠光子对,分束器用于将产生的纠缠光子对分成信号光和闲置光,第一
单光子探测器用于直接接收闲置光,信号光用于和参考光源沿同一光路传输,信号光经辅助定位装置到达第二单光子探测器,参考光源经辅助定位装置到达四象限探测器,通过调整辅助定位装置使参考光源到达四象限探测器的中心位置,根据辅助定位装置调整的角度确定待测目标点的角度;时间数字转换器用于获得第一单光子探测器和第二单光子探测器检测到的光子到达时间序列;符合计数测量模块用于根据两路信号的时间序列进行符合计数,得到与待测目标点的距离;根据所述距离和角度实现待测目标点的定位。
7.本发明借助于参考光源发出的可见光束与信号光子同轴传输,以实现量子信号的快速高效耦合,通过辅助定位装置光路结构设计,只需要通过旋转其中的直角棱镜反射镜就能够实现测距方向的360度转变以及方位角的提取,利用与待测目标点的距离和方位角信息可最终实现基于量子纠缠光的二维平面的高精度定位。
8.进一步地,所述的辅助定位装置包括长波通二向色镜、直角棱镜反射镜、中空屋脊棱镜反射镜、短波通二向色镜,长波通二向色镜用于透过信号光,反射参考光源,使信号光和参考光源沿同一光路传输至直角棱镜反射镜的一个直角反射面,经该直角反射面反射后到达中空屋脊棱镜反射镜,中空屋脊棱镜反射镜将其反射回到直角棱镜反射镜的另一个直角反射面,由该直角反射面反射到短波通二向色镜,短波通二向色镜用于透过参考光源,使参考光源到达四象限探测器,短波通二向色镜用于反射信号光,使信号光到达第二单光子探测器。
9.本发明通过直角棱镜反射镜和中空屋脊棱镜反射镜作为辅助定位装置,在利用该辅助定位装置确定目标点方位时,更加容易调节。
10.进一步地,在测量前需对所述二维平面定位系统进行调整,通过调节中空屋脊棱镜反射镜、第二单光子探测器和四象限探测器的位置和角度,使得当信号光子达到最佳耦合效率时,参考光束的照射点位于四象限探测器的中心位置,并以此固定第二单光子探测器和四象限探测器的位置和角度。
11.本发明在进行测量前,通过辅助定位装置的调节确定第二单光子探测器和四象限探测器的位置和角度,以保证在参考光束的照射点位于四象限探测器的中心位置时信号光子达到最佳耦合效率,使得在测量时能够通过直接观察参考光束的照射点位于四象限探测器的位置就能够判断出信号光子是否达到最佳耦合效率,进一步提升后续测量的准确性。
12.进一步地,在测量时,将中空屋脊棱镜反射镜放置在待测目标点处并将其反射面指向原点,旋转直角棱镜反射镜使信号光子和参考光传输至待测目标点处,且使参考光源到四象限探测器的中心位置,并记录此时的旋转角度,该旋转角度即为原点和待测目标点之间相对于x轴正向的偏转角度;关闭参考光源,通过纠缠光子对的到达时间序列进行符合计数测量得到原点和待测目标点之间的绝对距离;根据所述的旋转角度和得到的绝对距离对待测目标点进行定位;所述原点指的是纠缠光束在偏振分束器反射面的照射点,x轴正方向与纠缠光子对的出射方向相反。
13.本发明在测量时,通过旋转直角棱镜反射镜使信号光子和参考光传输至待测目标点处,将使参考光源到四象限探测器的中心位置时的旋转角度作为待测目标点的角度,借助于可见光确定了待测目标点的角度,进而实现了待测目标点的定位,该过程便捷、能够准确确定出待测目标点的相对角度信息。
14.进一步地,该系统在确定原点和目标点的绝对距离时需要标定信号光和闲置光的
固有光程差,标定过程如下:
15.a.建立平面坐标系,在x轴上任意选取两点,第一点相比第二点靠近原点,将定位装置放置在坐标原点,将中空屋脊棱镜反射镜分别放置到第一点上,基于第一单光子探测器和第二单光子探测器探测到的纠缠光子信号到达时间序列,利用符合计数测量方法得到第一距离信息;
16.b.将定位装置放置在坐标原点,将中空屋脊棱镜反射镜分别放置到第二点上,基于第一单光子探测器和第二单光子探测器探测到的纠缠光子信号到达时间序列,利用符合计数测量方法得到第二距离信息;
17.c.将定位装置放置在第一点,将中空屋脊棱镜放置在第二点,通过符合计数测量方法得到第三距离信息;
18.d.基于步骤a、b和c中得到的距离信息确定固有光程差,所述固有光程差等于第一距离信息加上第三距离信息减去第二距离信息。
19.本发明的整个标定过程中无需知道所选取的两个点的精确位置,能够快速、方便地实现固有光程差的标定,进而提高了测距的准确性。
20.进一步地,原点与待测目标点的绝对距离为:
[0021][0022]
其中l0为信号光和闲置光之间的固有光程差,l
or
为测量点与待测目标点之间的绝对距离,为利用纠缠光子对的到达时间序列进行符合计数测量得到的待测目标点距离值。
[0023]
本发明还提供了一种基于量子纠缠光的二维平面定位方法,该方法包括以下步骤:
[0024]
1)产生纠缠光子对,并将产生的纠缠光子对分成信号光和闲置光,使闲置光在测量本地直接被第一单光子探测器耦合接收;
[0025]
2)将信号光与参考光源沿同一光路传输至直角棱镜反射镜;
[0026]
3)在待测目标点处设置中空屋脊棱镜反射镜,并将其反射面指向直角棱镜反射镜的直角反射面,直角棱镜反射镜将信号光子和参考光传输至待测目标点处的中空屋脊棱镜反射镜,由中空屋脊棱镜反射镜反射后到达直角棱镜反射镜的另一个直角反射面,并由该直角反射面将信号光传输至第二单光子探测器,将参考光传输至四象限探测器,旋转直角棱镜反射镜使参考光源到四象限探测器的中心位置,并记录此时的旋转角度;
[0027]
4)关闭参考光源,通过纠缠光子对的到达时间序列进行符合计数测量得到原点和待测目标点之间的绝对距离;根据所述的旋转角度和得到的绝对距离对待测目标点进行定位。
[0028]
本发明借助于参考光源发出的可见光束与信号光子同轴传输,以实现量子信号的快速高效耦合,通过辅助定位装置光路结构设计,只需要通过旋转其中的直角棱镜反射镜就能够实现测距方向的360度转变以及方位角的提取,利用与待测目标点的距离和方位角信息可最终实现基于量子纠缠光的二维平面的高精度定位。
[0029]
进一步地,该方法还包括在测量前确定第二单光子探测器和四象限探测器位置,通过调节中空屋脊棱镜反射镜、第二单光子探测器和四象限探测器的位置和角度,使得当
信号光子达到最佳耦合效率时,参考光束的照射点位于四象限探测器的中心位置,并以此固定第二单光子探测器和四象限探测器的位置和角度。
[0030]
本发明在进行测量前,通过辅助定位装置的调节确定第二单光子探测器和四象限探测器的位置和角度,以保证在参考光束的照射点位于四象限探测器的中心位置时信号光子达到最佳耦合效率,使得在测量时能够通过直接观察参考光束的照射点位于四象限探测器的位置就能够判断出信号光子是否达到最佳耦合效率,进一步提升后续测量的准确性。
[0031]
进一步地,所述步骤4)在确定原点和目标点的绝对距离时需要标定信号光和闲置光的固有光程差,标定过程如下:
[0032]
a.建立平面坐标系,在x轴上任意选取两点,第一点相比第二点靠近原点,将定位装置放置在坐标原点,将中空屋脊棱镜反射镜分别放置到第一点上,基于第一单光子探测器和第二单光子探测器探测到的纠缠光子信号到达时间序列,利用符合计数测量方法得到第一距离信息;其中所述原点指的是分束器的中心点,x轴正方向与纠缠光子对的出射方向相反;
[0033]
b.将定位装置放置在坐标原点,将中空屋脊棱镜反射镜分别放置到第二点上,基于第一单光子探测器和第二单光子探测器探测到的纠缠光子信号到达时间序列,利用符合计数测量方法得到第二距离信息;
[0034]
c.将定位装置放置在第一点,将中空屋脊棱镜放置在第二点,通过符合计数测量方法得到第三距离信息;
[0035]
d.基于步骤a、b和c中得到的距离信息确定固有光程差,所述固有光程差等于第一距离信息加上第三距离信息减去第二距离信息。
[0036]
本发明的整个标定过程中无需知道所选取的两个点的精确位置,能够快速、方便地实现固有光程差的标定,进而提高了测距的准确性。
[0037]
进一步地,原点与待测目标点的绝对距离为:
[0038][0039]
其中l0为信号光和闲置光之间的固有光程差,l
or
为测量点与待测目标点之间的绝对距离,为利用纠缠光子对的到达时间序列进行符合计数测量得到的待测目标点距离值。
附图说明
[0040]
图1是本发明所采用的量子纠缠光源生成原理示意图;
[0041]
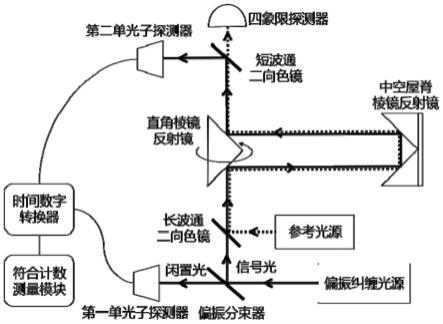
图2是本发明的基于量子纠缠光的二维平面定位原理示意图;
[0042]
图3是本发明所采用的目标点坐标测量原理示意图;
[0043]
图4是本发明基于量子纠缠光的二维平面定位所采用的三维坐标系示意图。
具体实施方式
[0044]
下面结合附图对本发明的具体实施方式作进一步地说明。
[0045]
本发明利用量子纠缠源产生频率一致的纠缠光子对,通过偏振分束器将纠缠光子对分成两路信号,其中一路为信号光,用于传输至待测目标点并反射,另一路为闲置光,用
于留在本地与反射回来的信号光进行符合计数测量,以解算出到目标点的距离信息;借助于参考光源、四象限探测器和辅助定位装置,使信号光和参考光源沿同一光路传输,信号光经辅助定位装置到达第二单光子探测器,参考光源经辅助定位装置到达四象限探测器,通过调整辅助定位装置使参考光源到四象限探测器的中心位置,根据辅助定位装置调整的角度确定待测目标点的方位角;根据待测目标点的距离和方位角实现对目标点的精确定位。
[0046]
系统实施例
[0047]
本发明二维平面定位系统如图2所示,定位系统包括纠缠光子对发生器、偏振分束器、第一单光子探测器、第二单光子探测器、时间数字转换器、符合计数测量模块、参考光源、四象限探测器和辅助定位装置;纠缠光子对发生器用于产生纠缠光子对,分束器用于将产生的纠缠光子对分成信号光和闲置光,第一单光子探测器用于接收闲置光,参考光源经辅助定位装置到达四象限探测器,通过调整辅助定位装置使参考光源到四象限探测器的中心位置,根据辅助定位装置调整的角度确定待测目标点的角度;时间数字转换器用于获得第一单光子探测器和第二单光子探测器检测到的光子到达时间序列;符合计数测量模块用于根据两路信号的时间序列进行符合计数,得到与待测目标点的距离;根据距离和角度实现待测目标点的定位。
[0048]
其中偏振纠缠光源是由量子纠缠光源产生设备生成,其生成原理如图1所示,包括飞秒激光器、第一半波片、透镜、磷酸氧钛钾(ppktp)晶体、长波通二向色镜、第二半波片和偏振分束器,飞秒激光器用于发出780nm飞秒脉冲泵浦光,经第一半波片调节光束的偏振状态后,由透镜聚焦到ppktp晶体中心,通过自发参量下转换过程产生频率一致的纠缠光子对,其波长为1560nm,图1中长波通二向色镜能够滤除参量下转换后剩余的泵浦光,通过精密控温仪控制ppktp晶体的温度,飞秒脉冲激光器的重复频率作为定位系统中的第一单光子探测器和第二单光子探测器的触发信号,使其工作在盖革模式,以提高量子纠缠信号的探测信噪比。产生的偏振纠缠光源经过偏振分束器分成两路,一路为信号光,另一路为闲置光,闲置光在本地直接被第一单光子探测器接收,信号光通过辅助定位装置被第二单光子探测器耦合接收。
[0049]
辅助定位装置包括长波通二向色镜、直角棱镜反射镜、中空屋脊棱镜反射镜、短波通二向色镜,长波通二向色镜用于透过信号光,反射参考光源,使信号光和参考光源沿同一光路传输至直角棱镜反射镜的一个直角反射面,经该直角反射面反射后到达中空屋脊棱镜反射镜,中空屋脊棱镜反射镜将其反射回到直角棱镜反射镜的另一个直角反射面,由该直角反射面反射到短波通二向色镜,短波通二向色镜用于透过参考光源,使参考光源到达四象限探测器,短波通二向色镜用于反射信号光,使信号光到达第二单光子探测器。本实施例中的参考光源为处于可见光波段633nm的准直激光束,经长波通二向色镜反射后与信号光子合束,并沿着与信号光相同的光路传输,随后在短波通二向色镜处与信号光分离并被四象探测器接收。
[0050]
在利用该定位系统进行测量前,需要通过辅助定位装置的调节确定第二单光子探测器和四象限探测器的位置和角度,以保证在参考光束的照射点位于四象限探测器的中心位置时信号光子达到最佳耦合效率。如图3和图4所示,在二维平面内建立坐标系,以纠缠光束在分束器反射面上的照射点为坐标原点,x轴正方向与纠缠光束的出射方向相反,将与x轴在水平面内垂直的方向定义为y轴方向。将中空屋脊棱镜反射镜放置在x轴方向上的a点,
分别调节中空屋脊棱镜反射镜、第二单光子探测器和四象限探测器的位置和角度,使得当信号光子达到最佳耦合效率时,参考光束的照射点恰好位于四象限探测器的中心位置;此时固定四象限探测器、第二单光子探测器的方位角,在实际定位过程不再调整。
[0051]
由于信号光和闲置光在定位系统中存在固有光程差,为了在定位过程中获得待定位目标点的绝对距离,还需要对固有光程差进行标定。标定过程如下:
[0052]
1)在x轴方向上任选两点,一个为a点,一个为b点,将定位装置放置在坐标原点o,将中空屋脊棱镜反射镜放置在a点,第一单光子探测器和第二单光子探测器探测到的纠缠光子信号传输至时间数字转换器,得到两路时间序列;对两路时间序列进行符合计数运算,得到符合测量曲线;利用最小二乘法对符合测量数据进行非线性拟合,曲线峰值位置对应的横坐标值即为两路光子信号的到达时间差δτ,到达时间差δτ与光速c的乘积即为符合测量方法得到的距离,定义为l1,定义o点与a点的真实距离为l
oa
,则固有光程差l0为测量得到的距离l1减去两倍的真实距离l
oa
。
[0053]
2)将定位装置放置在坐标原点o,把中空屋脊棱镜反射镜放置在b点,利用步骤1)中符合计数测量方法获得距离信息,定义为l2,o点和b点的真实距离为l
ob
,则固有光程差l0为测量得到的距离l2减去两倍的真实距离l
ob
。
[0054]
3)将定位装置放置在坐标a点,将中空屋脊棱镜反射镜放置在b点,再次利用步骤1)中符合技术测量方法获得两者距离信息,定义为l3,a点和b点的真实距离为l
ab
,则固有光程差l0为测量得到的距离l3减去两倍的真实距离l
ab
。
[0055]
4)根据步骤1)-3)的测量结果以及与固有光程差的关系,建立如下方程组:
[0056][0057]
基于上述方程组,可以在不知道a、b具体位置的情况下得到的信号光和闲置光之间的固有光程差l0:
[0058]
l0=l1+l
3-l2[0059]
通过上述过程即可实现固有光程差的标定,利用标定好的固有光程差就可以进行基于量子纠缠光的准确测距。
[0060]
在实际测量时,需要将中空屋脊棱镜反射镜放置在待测目标点r处并将反射面指向坐标原点o,直角棱镜反射镜使信号光子和参考光传输至待测目标点r处,通过微调中空屋脊棱镜反射镜的倾斜角,旋转直角棱镜反射镜,使参考光束调整到四象限探测器的中心位置,此时信号光子也可以达到最佳的耦合效率,此时的旋转角度即为待测目标点相对x轴正方向的偏转角。
[0061]
在调整结束后,关闭参考光源,进行距离测量,测量时,对纠缠光子对的到达时间序列进行符合计数,测量得到一个距离值根据标定的信号光和闲置光在定位系统的固有光程差计算坐标原点与待测目标点之间的绝对距离l
or
,具体的计算公式如下:
[0062]
[0063]
在上述实际测量过程中,直角棱镜反射镜的旋转角度θ为待测目标点在坐标系中相对x轴的正向偏转角,若待测目标点r的坐标为(xr,yr),则其满足以下关系:
[0064][0065]
根据上述方程组,在得到坐标原点与待测点之间的绝对距离l
or
和待测目标点在坐标系中相对x轴的正向偏转角θ后即可计算出待测目标点r的坐标:
[0066][0067]
通过上述过程,本发明能够很方便地实现对待测目标点的定位。借助于参考光源发出的可见光束与信号光子同轴传输,以实现量子信号的快速高效耦合,通过辅助定位装置光路结构设计,只需要通过旋转其中的直角棱镜反射镜就能够实现测距方向的360度转变以及方位角的提取,利用与待测目标的距离和方位角信息可最终实现基于量子纠缠光的二维平面的高精度定位。
[0068]
方法实施例
[0069]
本发明将生成的纠缠光子对分成信号光和闲置光,使闲置光在测量本地直接被第一单光子探测器耦合接收;将信号光与参考光源沿同一光路传输至直角棱镜反射镜;在待测目标点处设置中空屋脊棱镜反射镜,并将其反射面指向直角棱镜反射镜的直角反射面,直角棱镜反射镜将信号光子和参考光传输至待测目标点处的中空屋脊棱镜反射镜,由中空屋脊棱镜反射镜反射后到达直角棱镜反射镜的另一个直角反射面,并由该直角反射面将信号光传输至第二单光子探测器,将参考光传输至四象限探测器,旋转直角棱镜反射镜使参考光源到四象限探测器的中心位置,并记录此时的旋转角度;关闭参考光源,通过纠缠光子对的到达时间序列进行符合计数测量得到原点和待测目标点之间的绝对距离;根据所述的旋转角度和得到的绝对距离对待测目标点进行定位。该方法具体的实现过程已在系统实施例中进行了详细说明,这里不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1