柔性壁面减阻和降脉动压力效果测试装置及使用方法与流程
1.本发明涉及湍流控制变形壁面测试装置技术领域,尤其是柔性壁面减阻和降脉动压力效果测试装置及使用方法。
背景技术:
2.海洋大型鱼类具有非凡的低阻低噪高效游动能力,国内外专家学者对鱼类表皮的减阻降噪效果进行了深入研究,包括使用理论分析、数值计算、模型试验等手段研究鲸豚类生物的表皮功能,初步获得了柔性表皮的减阻降噪机理。海豚的皮肤可抽象为柔性自适应表皮-湍流控制壁面,具有延迟转捩、降低湍流猝发强度等减阻降噪功能。
3.目前对于湍流控制壁面的研究大多是数值模拟,试验研究难度高,研究较少。但数值模拟需要对边界条件、材料等进行简化,仅靠数值模拟可信度较低,并且数值计算的正确性还需要借助试验来验证。
技术实现要素:
4.本技术人针对上述现有生产技术中的缺点,提供一种结构合理的柔性壁面减阻和降脉动压力效果测试装置及使用方法,本发明所提供的湍流控制柔性运动壁面通过调节单向介电弹性体驱动器的输入电压信号,生成波幅、频率可调的展向随行波面,柔性运动壁面前方和后方均布有mems热膜传感器和脉动压力传感器,控制器根据柔性运动壁面后方传感器和脉动压力传感器反馈过来的信号,调节控制电压,可对不同运动形式的柔性运动壁面减阻降脉动压力效果进行测试,从而提高数值模拟柔性运动壁面湍流控制的可靠性。
5.本发明所采用的技术方案如下:
6.一种柔性运动壁面减阻和降脉动压力效果测试装置,包括水路模块、柔性运动壁面感知致动单元和测量模块,
7.所述水路模块包括相互连通的试验段、进流通道、出流通道,还包括回流通道;所述回流通道包括相互连通的进水箱、出水箱、水泵和回流管道,
8.所述柔性运动壁面感知致动单元包括基板、设在基板上的蒙皮,在基板背离蒙皮一侧设有多个单项介电弹性体驱动器;柔性运动壁面感知致动单元设置在试验段处,
9.所述测量装置包括若干个传感器,传感器设于柔性运动壁面感知致动单元的上下游,在试验段上方设有激光位移扫描系统,在试验段侧面设有相机。
10.所述柔性运动壁面感知致动单元由夹具框夹持,设于试验段的壁板上。
11.所述基板采用铝板,厚度取值范围0.2~0.5mm。
12.蒙皮采用硅胶蒙皮,厚度取值范围0.5~2mm,弹性模量取值范围0.3-1.0mpa。
13.蒙皮的上表面平贴于基板表面,且蒙皮边缘处与基板齐平。
14.单向介电弹性体驱动器矩阵式设于基板上,每一排单项介电弹性体驱动器中,中间的单项介电弹性体驱动器与两侧的单项介电弹性体驱动器之间存在相位差180
°
。
15.纵向的单项介电弹性体驱动器列中,相邻两单项介电弹性体驱动器之间的相位差
相同。
16.柔性运动壁面感知致动单元位于试验段中心处。
17.回流通道上设有电磁流量计。
18.一种柔性运动壁面减阻和降脉动压力效果测试装置的使用方法,包括如下步骤:
19.安装阶段:连接试验段、进流通道、出流通道和回流通道,连接进水箱、出水箱、水泵和回流管道形成回流通道;预安装柔性运动壁面感知致动单元,将蒙皮和多个单项介电弹性体驱动器分别粘接在基板两侧,采用夹具框将柔性运动壁面感知致动单元夹持并安装在试验段的壁板上;在试验段上方布置扫描系统,在试验段侧边布置相机;
20.测试阶段:对单项介电弹性体驱动器输入驱动电压,此时单项介电弹性体驱动器与基板内部同时存在应力与应变,柔性运动壁面感知致动单元呈现出变形模态;通过对单项介电弹性体驱动器施加不同激励信号,在柔性运动壁面感知制动单元上产生展向运动的随形波表面,激励的频率选取柔性运动壁面两个相邻固有频率的中间值,固有频率由预先激振试验测得;输入激励的相位差与激励点的布置位置相关,输入的电压大小与期望控制的壁面波幅相关;
21.单向介电弹性体驱动器的相位符合如下公式:
22.φ1=φ3=0
°
,φ2=180
°
,φ4=φ6=γ,φ5=180
°
+γ,
23.其中,φ为各单项介电弹性体驱动器的相位,γ为初始相位值;
24.根据实际需要设置对照试验,对照试验包括未发生变形模态前的试验、发生变形模态后的试验;
25.未发生变形模态前的试验用于获得测试表面的剪应力值和脉动压力值及近壁面piv流场测试结构;
26.发生变形模态后的试验通过单向介电弹性体驱动器驱动层合板,获得柔性表面随行波波形,且随行波到达边界后不反弹,将变形后的随性波表面剪应力值、脉动压力值和流场结构与未发生变形表面进行比较,得到柔性运动壁面流动控制减阻、降脉动压力效果和相关流动机理。
27.本发明的有益效果如下:
28.本发明结构紧凑、合理,操作方便,与被动的柔性表面相比,本发明利用单向介电弹性体驱动器驱动薄金属板实现柔性主动变形,能根据感知的流动信息自适应对流动进行控制,实现顺流抑湍,从而克服了被动式柔性壁面流动控制只适用于某特定工况的弊端。
29.与机械式、电磁式、机电伺服式驱动壁面变形相比,由于主动机械式/机电式驱动机构复杂,重量大,密封困难,难以在水介质中使用。本发明采用单向介电弹性体驱动器是一种新型智能材料,可进行大幅度弯曲,很容易粘贴到包括曲面在内的工作表面,具有重量轻,尺寸小,能耗低、响应速度快的优点。
30.与波形能切换但波面静止的波动壁面相比,本发明为波面运动的柔性壁面,能生成展向运动的随行波,且频率、波幅均可变换,更符合仿生对象的运动特性。
附图说明
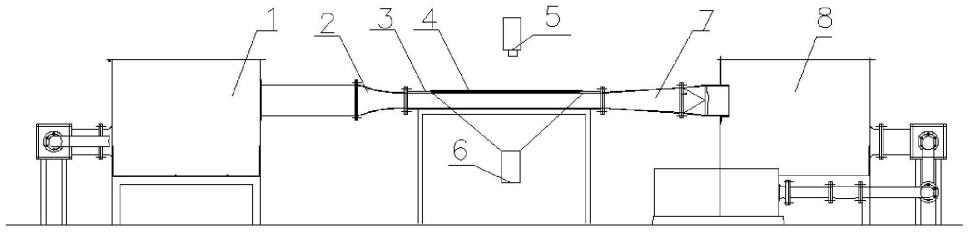
31.图1为本发明测试装置的整体结构布置正视图。
32.图2为本发明测试装置的整体结构布置俯视图。
33.图3为本发明的流场测试布置的侧视图。
34.图4为本发明的柔性运动壁面测试的背视图,图中所示为仰视角度的试验段。
35.图5为本发明的运动壁面的结构图。
36.图6为本发明的运动壁面单向介电弹性体驱动器布置图。
37.其中:1、进水箱;2、收缩段;3、试验段;4、柔性运动壁面感知致动单元;5、激光位移扫描仪;6、激光光源;7、扩张段;8、出水箱;9、水泵;10、流量计;11、回流管道;12、相机;
38.401、mems热膜剪应力传感器;402、脉动压力传感器;403、单向介电弹性体驱动器;404、基板;405、蒙皮。
具体实施方式
39.下面结合附图,说明本发明的具体实施方式。
40.如图1-图6所示,本实施例的柔性运动壁面减阻和降脉动压力效果测试装置,包括水路模块、柔性运动壁面感知致动单元4和测量模块,
41.水路模块包括相互连通的试验段3、进流通道、出流通道,还包括回流通道;回流通道包括相互连通的进水箱1、出水箱8、水泵9和回流管道11,
42.柔性运动壁面感知致动单元4包括基板404、设在基板404上的蒙皮405,在基板404背离蒙皮405一侧设有多个单项介电弹性体驱动器;柔性运动壁面感知致动单元4设置在试验段3处,
43.测量装置包括若干个传感器,传感器设于柔性运动壁面感知致动单元4的上下游,在试验段3上方设有激光位移扫描系统,在试验段3侧面设有相机12。
44.柔性运动壁面感知致动单元4由夹具框夹持,设于试验段3的壁板上。
45.基板404采用铝板,厚度取值范围0.2~0.5mm。
46.蒙皮405采用硅胶蒙皮405,厚度取值范围0.5~2mm,弹性模量取值范围0.3-1.0mpa。
47.蒙皮405的上表面平贴于基板404表面,且蒙皮405边缘处与基板404齐平。
48.单向介电弹性体驱动器403矩阵式设于基板404上,每一排单项介电弹性体驱动器中,中间的单项介电弹性体驱动器与两侧的单项介电弹性体驱动器之间存在相位差180
°
。
49.纵向的单项介电弹性体驱动器列中,相邻两单项介电弹性体驱动器之间的相位差相同。
50.柔性运动壁面感知致动单元4位于试验段3中心处。
51.回流通道上设有电磁流量计10。
52.本实施例的柔性运动壁面减阻和降脉动压力效果测试装置的使用方法,包括如下步骤:
53.安装阶段:连接试验段3、进流通道、出流通道和回流通道,连接进水箱1、出水箱8、水泵9和回流管道11形成回流通道;预安装柔性运动壁面感知致动单元4,将蒙皮405和多个单项介电弹性体驱动器分别粘接在基板404两侧,采用夹具框将柔性运动壁面感知致动单元4夹持并安装在试验段3的壁板上;在试验段3上方布置扫描系统,在试验段3侧边布置相机12;
54.测试阶段:对单项介电弹性体驱动器输入驱动电压,此时单项介电弹性体驱动器
与基板404内部同时存在应力与应变,柔性运动壁面感知致动单元4呈现出变形模态;通过对单项介电弹性体驱动器施加不同激励信号,在柔性运动壁面感知制动单元上产生展向运动的随形波表面,激励的频率选取柔性运动壁面两个相邻固有频率的中间值,固有频率由预先激振试验测得;输入激励的相位差与激励点的布置位置相关,输入的电压大小与期望控制的壁面波幅相关;
55.单向介电弹性体驱动器的相位符合如下公式:
56.φ1=φ3=0
°
,φ2=180
°
,φ4=φ6=γ,φ5=180
°
+γ,
57.其中,φ为各单项介电弹性体驱动器的相位,γ为初始相位值;
58.根据实际需要设置对照试验,对照试验包括未发生变形模态前的试验、发生变形模态后的试验;
59.未发生变形模态前的试验用于获得测试表面的剪应力值和脉动压力值及近壁面piv流场测试结构;
60.发生变形模态后的试验通过单向介电弹性体驱动器403驱动层合板,获得柔性表面随行波波形,且随行波到达边界后不反弹,将变形后的随性波表面剪应力值、脉动压力值和流场结构与未发生变形表面进行比较,得到柔性运动壁面流动控制减阻、降脉动压力效果和相关流动机理。
61.本发明提供的湍流控制柔性运动壁面,通过调节单向介电弹性体驱动器的输入电压信号,生成波幅、频率可调的展向随行波面,柔性运动壁面前方和后方均布有mems热膜传感器和脉动压力传感器,控制器根据柔性运动壁面后方传感器和脉动压力传感器反馈过来的信号,调节控制电压,可对不同运动形式的柔性运动壁面减阻降脉动压力效果进行测试,操作方便。
62.本实施例的具体结构及工作过程如下:
63.整体装置包括水路模块、测量模块和柔性运动壁面感知致动单元4,水路模块包括试验段3、进流通道、出流通道和回流通道,进流通道即为稳定收缩段2,出流通道即为扩张过渡段。进流通道和出流通道均与试验段3相连通。回流通道包括进水箱1、出水箱8和水泵9,通过回流管道11连通。在回流通道上安装有电磁流量计10,用于监测通道内的流量。
64.测量模块包括mems热膜传感器和脉动压力传感器402,分别设置在柔性运动壁面感知致动单元4的上游和下游,用来实时测得柔性运动壁面前后的剪应力值和脉动压力值。同时,试验段3上方布有激光位移扫描测量系统,测量变形壁面微位移;还布置有激光光源6,用于照射片光。试验段3侧面布有高速相机12,用于粒子图像测速piv流场图像拍照。上述结构在mems表面热膜传感器、脉动压力传感器402外,通过增加非接触式数据获取手段,使得在柔性运动壁面运动过程中的流场实时测量成为可能,即可以通过监测数据对流场和剪应力、脉动压力的时空相关性进行分析。
65.柔性运动壁面感知致动单元4由多个单向介电弹性体驱动器403dea(dielectric elastomers actuators)、金属基板404和硅胶蒙皮405组成,单向介电弹性体驱动器403用环氧胶粘接在金属基板404上表面,硅胶蒙皮405粘接在金属基板404下表面,三者一起共同构成柔性运动壁面致动模块,也就是层合板。利用金属夹具框将上述的柔性运动壁面夹住,并安装在试验段3上壁板上。
66.金属基板404厚度为0.2mm~0.5mm,本实施例中金属基板404为铝板,厚度可以采
用节点值0.2mm、0.5mm,也可以采用中间值0.3mm。
67.硅胶蒙皮405厚度为0.5~2mm,弹性模量为0.3-1.0mpa,本实施例中采用厚度为1mm,弹性模量0.5mpa;
68.单向介电弹性体驱动器403安装在金属基板404上方,并使硅胶蒙皮405上表面与载体表面保持平齐,如图4所示,其一是避免突出部分会带来很大的流动阻力,其二是尽量减小致动器承受的载荷。
69.安装完成后,对单向介电弹性体驱动器403输入驱动电压,单向介电弹性体驱动器403和金属基板404内部同时存在应力与应变,由于整个柔性运动壁面四周被金属夹具框固定住,因此整个柔性运动壁面会在单向介电弹性体驱动器403的致动力和夹具框的约束下呈现不同的变形模态,通过给单向介电弹性体驱动器403施加不同的激励信号在柔性运动壁面;即由硅胶蒙皮405、金属基板404、单向介电弹性体驱动器403构成的壁面上产生展向运动的随行波表面。
70.上述激励的频率优先选取柔性运动壁面两个相邻固有频率的中间值,输入激励的相位差与激励点的布置位置密切相关,输入的电压大小与期望控制的壁面波幅相关。
71.由于运动随行波的幅值大小与施加电压幅值的大小成正比,因此在允许的电压范围内,施加电压越大,则产生的展向随行波振幅越大。
72.金属基板404下表面粘贴的一层柔性硅橡胶蒙皮405,使柔性运动壁面在能够变形运动的同时起到释放来流压力,降低阻力和脉动压力激励的效果。为了防止运动平板上表面出现皱褶,初始薄膜粘贴时应进行适当的预张紧。
73.另外,电压激励频率应选择该柔性运动壁面致动模块相邻两个固有频率的中间频率,柔性运动壁面致动模块的固有频率可先行由激振试验测得。
74.金属基板404上布置在左右两边的单向介电弹性体驱动器403相位相同,如图5所示,中间的单向介电弹性体驱动器4032和5与左右两边的单向介电弹性体驱动器403有额外的相位差180
°
,而单向介电弹性体驱动器4031-4,2-5,3-6之间的相位差相同,6个单向介电弹性体驱动器403的相位如下式。
75.φ1=φ3=0
°
,φ2=180
°
,φ4=φ6=γ,φ5=180
°
+γ
76.综上,本实施例在平板基板404上产生波形参数可控的沿展向的随行波。
77.在本实施例中,将mems热膜传感器和脉动压力传感器402布置在柔性运动壁面的前后测,也就是上下游位置,通过传感器感知流动状态的变化,前部的mems传感器和脉动压力传感器402获取来流壁面剪应力值、温度值、来流速度值,脉动压力值辨识来流的流动状态,布置在后部的mems剪应力传感器和传声器可以对柔性运动壁面控制的影响区域进行测量,通过改变展向随行波面的运动参数来测试不同运动随行波面的减阻和降脉动压力效果。
78.本测试装置可进行对照试验,首先进行层合板未发生变形前的试验,可获得测试表面的剪应力值和脉动压力值及近壁面piv流场测试结构,其后进行变形后的运动随行波表面试验,通过单向介电弹性体驱动器403驱动层合板,获得柔性表面随行波波形,且随行波到达边界后不反弹,将变形后的随性波表面剪应力值、脉动压力值和流场结构与未发生变形表面进行比较,可得到柔性运动壁面流动控制减阻、降脉动压力效果和相关流动机理。改变输入的电信号可获得不同柔性运动随行波表面的减阻降脉动压力效果。
79.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1