一种自适应的卫星导航载波观测值周跳探测阈值确定方法
1.本发明属于卫星导航定位技术领域,具体而言,涉及一种自适应的卫星导航载波观测值周跳探测阈值确定方法。
背景技术:
2.基于mw组合和gf组合的turboedit周跳探测方法(blewitt,1990),广泛应用于gnss数据处理软件中。而turboedit中主要作用是探测小周跳的相位无几何gf模型,其应用前提是电离层误差在历元间变化比较平稳,从而有利于差分消除。但是电离层活跃期间,电离层误差变化通常较为剧烈,因此在电离层活动活跃期间,周跳探测的关键在于如何准确处理电离层误差。其中较为有效的方式之一是合理的确定周跳探测观测值的阈值。
3.通常在电离层变化比较缓慢期间,mw组合周跳阈值一般取1-2周,gf组合周跳阈值一般取0.05-0.15m。但是在电离层活动活跃期间,上述常规的阈值容易导致过多的卫星被探测为发生周跳,即产生过多的虚假周跳。基于此, zhang等(2014)在不处理电离层误差的前提下,通过松弛mw组合周跳阈值为2 周、gf组合周跳阈值为0.5m,来避免电离层活跃期间由于过多虚假周跳引起的模糊度参数频繁重新初始化的问题。在此基础上,luo等(2019)通过详细分析中国香港地区振幅闪烁强度与周跳大小的分布,对mw组合和gf组合周跳阈值分别优化为1.2周和0.4m。尽管观测值中仍然可能存在小周跳,但结合定位随机模型优化方法,ppp动态定位结果得到明显改善。ju等(2017)针对多系统实验观测网中跟踪站观测北斗静止轨道卫星高度角低导致常出现小周跳的现象,提出一种利用多项式模型去除电离层趋势项,并采用自回归条件异方差模型来估计去趋势项后gf组合周跳探测阈值方法,结果表明结合mw方法,大部分小周跳都能有效探测。
4.总的来说,目前针对电离层活动活跃期间,周跳探测阈值确定方法主要包括:采用常规的mw组合和gf组合周跳阈值;根据经验,松弛mw组合和gf 组合周跳阈值;根据振幅闪烁强度与周跳大小的分布,优化mw组合和gf组合周跳阈值;通过模型去除gf组合中电离层误差,再采用自回归条件异方差模型来确定gf组合周跳阈值。
5.尽管目前电离层活动活跃情况下,gnss载波观测值周跳探测方法取得了一定的成果,但是大部分情况下,mw组合和gf组合周跳探测阈值都是固定的,不能随着电离层活动活跃强度进行自适应的调整。实际情况下,不同强度的电离层活动下,电离层延迟误差对周跳探测模型的影响程度不同。在mw组合和gf组合周跳探测阈值固定的条件下,当电离层延迟误差的影响超过周跳探测固定阈值时,仍然会产生大量虚假周跳;当电离层延迟误差的影响远远小于周跳探测固定阈值时,会漏检大量的周跳,导致载波相位观测值精度降低,进一步影响gnss高精度定位结果。如何根据不同电离层活动强度,自适应的优化调整mw组合和gf组合周跳阈值是,是急需解决的关键问题。因此,本专利提出一种自适应的卫星导航载波观测值周跳探测阈值确定方法。
技术实现要素:
6.针对现有方法的不足,本发明提供了一种自适应的卫星导航载波观测值周跳探测阈值确定方法,解决电离层扰动情形下,虚假周跳过多,导致卫星导航定位精度降低的问题。
7.为实现上述目的,本发明采取的技术方案为:一种自适应的卫星导航载波观测值周跳探测阈值确定方法,通过分析mw组合和gf组合周跳探测观测值的分布,基于滑动时间窗口自适应构造mw和gf组合周跳探测阈值,具体步骤如下:
8.s1:gnss观测值进行预处理,主要包括伪距和载波粗差探测;
9.s2:建立宽巷相位减窄巷伪距mw组合周跳探测模型,mw组合用于大周跳的探测,基于粗差探测后的gnss伪距和载波观测值,求解每个历元每颗卫星的mw组合周跳探测观测量;
10.s3:建立相位无几何gf组合周跳探测模型,gf组合用于小周跳的探测,基于粗差探测后的纯gnss载波观测值,求解每个历元每颗卫星的gf组合周跳探测观测量;
11.s4:自适应确定mw组合和gf组合周跳探测阈值。
12.作为优选的,步骤s1中gnss观测值进行预处理的方法是,首先,对伪距和载波观测值可靠性进行检验,对伪距和载波观测值绝对值小于一定阈值的卫星进行标记;其次,对不同频率的伪距、以及不同频率的载波观测值进行一致性检验;最后对相同频率的伪距和载波观测值进行一致性检验;从而实现gnss伪距和载波观测值的粗差探测。
13.作为优选的,步骤s4中自适应确定mw组合和gf组合周跳探测阈值的方法是,分析mw组合和gf组合周跳探测观测值的分布,以5分钟为滑动时间窗口,分别计算mw组合和gf组合周跳探测观测值的均方根误差rms,以3倍的均方根误差rms作为mw组合和gf组合周跳探测的阈值,对于最初5分钟的周跳阈值,可以采用经验阈值确定。
14.作为优选的,步骤s2中,mw组合周跳探测观测量计算方法如下:
[0015][0016]
式中δ为历元差分算子,n
mw
为mw组合周跳探测观测值,p1和p2为频率为f1和f2的伪距观测值,和为对应的频率相位观测值,λ
mw
为宽巷波长,ε为残余误差。
[0017]
作为优选的,步骤s3中,gf组合周跳探测观测量计算方法如下:
[0018][0019]
式中δ为历元差分算子,为gf组合周跳探测观测值,和为波长为λ1和λ2的载波相位观测值,n1和n2为对应的模糊度参数,γ=f
12
/f
22
为电离层误差系数,i为l1信号的电离层误差,ε为残余误差。
[0020]
作为优选的,步骤s4中,滑动时间窗口选为5分钟,以3倍的均方根误差rms作为mw组合和gf组合周跳探测的阈值,计算方法如下:
[0021][0022]
其中tn为5分钟内mw组合和gf组合周跳探测观测值的数量,对于最初5分钟的周跳
阈值,可以采用经验阈值确定,其中δn
mw
为2周,为0.05m。
[0023]
本发明的技术效果和优点:
[0024]
电离层变化活跃情况下,gnss载波相位周跳探测观测值受电离层延迟误差影响,导致周跳探测不准,从而使得卫星定位精度降低。本发明通过分析mw 组合和gf组合周跳探测观测值的分布,统计对应观测值的均方根误差rms,以均方根误差为基准,自适应构造mw和gf组合周跳探测阈值,能够降低虚假周跳的探测,提高周跳探测的准确性,从而改善电离层变化活跃情况下卫星导航定位精度。
附图说明
[0025]
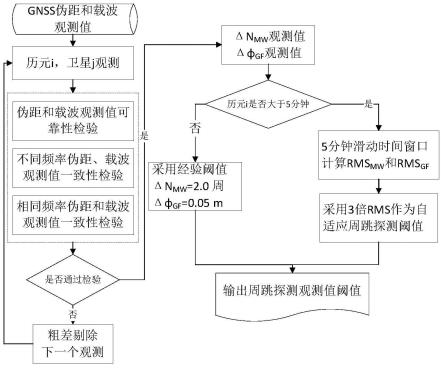
图1为一种自适应的卫星导航载波观测值周跳探测阈值确定方法的方案图;
[0026]
图2为2015年3月17日空间环境参数变化图;
[0027]
图3为采用策略1时四个gnss测站动态ppp定位误差图;
[0028]
图4为采用策略1时四个gnss测站动态ppp定位误差图;
[0029]
图5为采用策略1时四个gnss测站动态ppp定位误差图。
具体实施方式
[0030]
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0031]
如图1为一种自适应的卫星导航载波观测值周跳探测阈值确定方法的方案图,通过分析mw组合和gf组合周跳探测观测值的分布,基于滑动时间窗口自适应构造mw和gf组合周跳探测阈值,包括如下操作步骤:
[0032]
s1:gnss观测值进行预处理,主要是伪距和载波粗差探测。首先,对伪距和载波观测值可靠性进行检验,对伪距和载波观测值绝对值小于一定阈值的卫星进行标记;其次,对不同频率的伪距、以及不同频率的载波观测值进行一致性检验;最后对相同频率的伪距和载波观测值进行一致性检验;从而实现gnss伪距和载波观测值的粗差探测;
[0033]
s2:建立宽巷相位减窄巷伪距mw组合周跳探测模型,mw组合主要用于大周跳的探测。基于粗差探测后的gnss伪距和载波观测值,求解每个历元每颗卫星的mw组合周跳探测观测量;
[0034]
s3:建立相位无几何gf组合周跳探测模型,gf组合主要用于小周跳的探测。基于粗差探测后的纯gnss载波观测值,求解每个历元每颗卫星的gf组合周跳探测观测量;
[0035]
s4:自适应确定mw组合和gf组合周跳探测阈值。分析mw组合和gf组合周跳探测观测值的分布,以5分钟为滑动时间窗口,分别计算mw组合和gf 组合周跳探测观测值的均方根误差rms,以3倍的均方根误差rms作为mw组合和gf组合周跳探测的阈值,对于最初5分钟的周跳阈值,可以采用经验阈值确定。
[0036]
步骤s2中,mw组合周跳探测观测量计算方法如下:
[0037]
[0038]
式中δ为历元差分算子,n
mw
为mw组合周跳探测观测值,p1和p2为频率为f1和f2的伪距观测值,和为对应的频率相位观测值,λ
mw
为宽巷波长,ε为残余误差。
[0039]
步骤s3中,gf组合周跳探测观测量计算方法如下:
[0040][0041]
式中δ为历元差分算子,为gf组合周跳探测观测值,和为波长为λ1和λ2的载波相位观测值,n1和n2为对应的模糊度参数,γ=f
12
/f
22
为电离层误差系数,i为l1信号的电离层误差,ε为残余误差。
[0042]
步骤s4中,滑动时间窗口选为5分钟,以3倍的均方根误差rms作为mw 组合和gf组合周跳探测的阈值,计算方法如下:
[0043][0044]
其中tn为5分钟内mw组合和gf组合周跳探测观测值的数量,对于最初5分钟的周跳阈值,可以采用经验阈值确定,其中δn
mw
为2周,为0.05m。
[0045]
为了验证方法的可行性,我们在全球范围选择了4个gnss测站进行动态精密单点定位ppp实验,时间选择为2015年3月17日。该天发生了磁暴,电离层活动较强,该天的空间环境参数如图2所示。4个gnss测站的位置信息如表1所示。
[0046]
表1gnss测站经纬度信息
[0047][0048]
我们比较了三种周跳阈值确定方法下的定位精度。策略1为多数gnss软件采用的缺省阈值,其中mw组合和gf组合周跳阈值分别为2周和0.05m;策略2为采用松弛阈值,其中mw组合和gf组合周跳阈值分别为5周和0.20 m;策略3为本发明提出的自适应载波相位周跳阈值确定方法。
[0049]
采用策略1的定位结果如图3所示,采用策略2的动态ppp定位结果如图4所示,采用策略3的动态ppp定位结果如图5所示。三种策略下动态ppp 定位的三维均方根误差统计信息如表2所示。
[0050]
表2三种周跳探测阈值确定策略下动态ppp定位精度
[0051][0052]
从图3到图5,以及表2,可以看出,本发明提出的自适应的卫星导航载波观测值周跳阈值确定方法精度最高。四个gnss测站动态ppp定位三维rms 平均值约为10cm。相对于策略1中的缺省阈值,四个gnss测站定位精度分别提高82.0%,88.2%,85.8%,86.2%。
[0053]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所做的举例,而并非是对本发明实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引申出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1