一种激光波长测量系统、激光波长计算方法及计算系统与流程
1.本发明涉及光干涉测试领域,特别是涉及一种激光波长测量系统、激光波长计算方法及计算系统。
背景技术:
2.激光波长测量方法大部分基于干涉原理,常见的商业化的波长测量仪器中使用的干涉腔分为迈克尔逊干涉型,f-p干涉型及斐索干涉型等。斐索干涉仪是测量激光波长常用的仪器,现有的技术只采用一个斐索楔块获取干涉环,不容易达到高的测量精度。
3.目前波长计主流是迈克尔逊干涉类型波长计,主要的缺陷是测量速度极其慢,生产效率低下,且迈克尔逊波长计使用动臂式结构,仪器采用运动元件,测量是在运动过程中进行的,因此只能测量连续激光波长。而一些基于fp腔的波长测量又受光功率和温度的影响较大,精度比较差。而使用单斐索干涉腔结构无法实现高精度的要求(如采用厚度为1mm的斐索干涉腔,最终波长测量精度为10-5量级),因此,现有技术中的激光波长测量系统无法兼顾速度和精度。
技术实现要素:
4.本发明第一方面的一个目的是提供一种激光波长测量系统,能够兼顾激光波长的测量速度和精度。
5.本发明的进一步的一个目的是要保证测量结果的准确性。
6.本发明第二方面的一个目的是提供一种用于上述激光波长测量系统的激光波长计算方法。
7.本发明第三方面的一个目的是提供运行上述激光波长计算方法的计算系统。
8.特别地,本发明提供了一种激光波长测量系统,包括:分光装置,用于将待测激光分成呈预设角度布置且分光比为50:50的反射光束和透射光束,所述反射光束和所述透射光束均为平行光束;薄型斐索干涉腔、第一柱面镜和第一线列探测器,依次设置于所述反射光束的下游且均与所述反射光束垂直,所述反射光束经所述薄型斐索干涉腔和所述第一柱面镜后在所述第一线列探测器上形成第一干涉条纹,所述第一线列探测器用于测量所述第一干涉条纹的相位和周期;厚型斐索干涉腔、第二柱面镜和第二线列探测器,依次设置于所述透射光束的下游且均与所述透射光束垂直,所述薄型斐索干涉腔的厚度小于所述厚型斐索干涉腔的厚度,所述透射光束经所述厚型斐索干涉腔和所述第二柱面镜后在所述第二线列探测器上形成第二干涉条纹,所述第二线列探测器用于测量所述第二干涉条纹的相位和周期。
9.可选地,所述薄型斐索干涉腔的厚度在0.05-2mm之间,所述厚型斐索干涉腔的厚度在5-20mm之间。
10.可选地,所述薄型斐索干涉腔包括依次布置的第一平板玻璃、第一反射膜、带楔角且呈环形的第一玻璃环、第二反射膜和第二平板玻璃;
所述厚型斐索干涉腔包括依次布置的第三平板玻璃、第三反射膜、带楔角且呈环形的第二玻璃环、第四反射膜和第四平板玻璃。
11.可选地,所述分光装置包括中心对齐于同一直线且依次布置的光纤、光纤准直器和离轴抛物面反射镜,所述离轴抛物面反射镜的焦点与所述光纤准直器的出射端重合,所述离轴抛物面反射镜用于将从所述光纤准直器射出的发散光束转变为平行光束,所述分光装置还包括位于所述平行光束下游的分光器,用于将所述平行光束分为所述反射光束和所述透射光束。
12.特别地,本发明还提供了一种用于上述任一项所述的激光波长测量系统的激光波长计算方法,包括:根据所述第一线列探测器测得的第一干涉条纹的周期p和预先标定的所述薄型斐索干涉腔的劈尖的第一角度α1计算待测激光的第一波长值;根据所述第一线列探测器测得第一干涉条纹的阵列零单元处的第一相位ф1和所述第一波长值计算所述薄型斐索干涉腔的第一厚度;根据所述第一角度α1、所述第一厚度、所述第一波长值和所述第一相位ф1计算所述第一干涉条纹的第一级次m以及所述待测激光的第二波长值;根据所述第二线列探测器测得的第二干涉条纹的阵列零单元处的第二相位ф2、所述第一级次m和所述第二波长值计算所述待测激光的第三波长值,并将所述第三波长值作为所述待测激光的最终波长值。
13.可选地,根据所述第一线列探测器测得的第一干涉条纹的周期p和预先标定的所述薄型斐索干涉腔的劈尖的第一角度α1计算待测激光的第一波长值的步骤包括:利用已知波长的激光标定所述薄型斐索干涉腔的劈尖的第一角度α1;根据以下公式计算所述第一波长值:。
14.可选地,根据所述第一线列探测器测得第一干涉条纹的阵列零单元处的第一相位ф1和所述第一波长值计算所述薄型斐索干涉腔的第一厚度的步骤包括:根据以下公式计算所述第一厚度:
;其中,int()为取整函数。
15.可选地,根据所述第一角度α1、所述第一厚度、所述第一波长值和所述第一相位ф1计算所述第一干涉条纹的第一级次m以及所述待测激光的第二波长值的步骤包括:根据以下公式计算所述第一级次m:;其中,int()为取整函数;根据所述第二角度α2、所述第一厚度和所述第一相位ф1计算与所述第一厚度所对应的所述第一干涉条纹的第一条纹厚度;根据以下公式计算所述第二波长值:。
16.可选地,根据所述第二线列探测器测得的第二干涉条纹的阵列零单元处的第二相位ф2、所述第一级次m和所述第二波长值计算所述待测激光的第三波长值,并将所述第三波长值作为所述待测激光的最终波长值的步骤包括:根据以下公式计算所述厚型斐索干涉腔的第二厚度:;其中,int()为取整函数;根据所述第二厚度、所述第二相位ф2和预先标定的所述厚型斐索干涉腔的劈尖的第二角度α2计算与所述第二厚度所对应的所述第二干涉条纹的第二条纹厚度;根据以下公式计算所述第二干涉条纹的第二级次m:;
根据以下公式计算所述第三波长:。
17.特别地,本发明还提供了一种计算系统,包括存储器和处理器,所述存储器内存储有控制程序,所述控制程序被所述处理器执行时用于实现上述任一项所述的激光波长计算方法。
18.根据本发明的一个实施例,激光波长测量系统采用两种厚度的斐索干涉腔实现了较宽光谱范围内激光波长的快速、便捷测量,同时,相较于传统斐索波长计具有更高的测量精度,且无需参考光源。
19.根据本发明的一个实施例,通过调节各个部件的角度和位置,可以选取到薄型斐索干涉腔和厚型斐索干涉腔最平整的镜片表面位置和最清晰的干涉条纹用于测量,从而可以保证测量结果更准确。
20.根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述以及其他目的、优点和特征。
附图说明
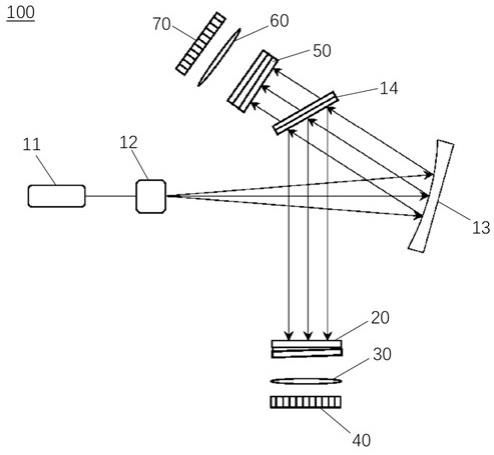
21.后文将参照附图以示例性而非限制性的方式详细描述本发明的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:图1是根据本发明一个实施例的激光波长测量系统的结构示意图;图2是根据本发明一个实施例的激光波长测量系统的厚型斐索干涉腔的结构示意图;图3是根据本发明一个实施例的激光波长测量系统的厚型斐索干涉腔的分解示意图;图4是根据本发明一个实施例的激光波长计算方法的流程图;图5是根据本发明一个实施例的激光波长测量系统与迈克尔逊波长计的所测得的波长值精度差值图。
22.附图标记:100-激光波长测量系统、11-光纤、12-光纤准直器、13-离轴抛物面反射镜、14-分光器、20-薄型斐索干涉腔、30-第一柱面镜、40-第一线列探测器、50-厚型斐索干涉腔、51-第三平板玻璃、52-第三反射膜、53-第二玻璃环、54-第四反射膜、55-第四平板玻璃、60-第二柱面镜、70-第二线列探测器。
具体实施方式
23.图1是根据本发明一个实施例的激光波长测量系统100的结构示意图。图2是根据本发明一个实施例的激光波长测量系统100的厚型斐索干涉腔50的结构示意图。图3是根据本发明一个实施例的激光波长测量系统100的厚型斐索干涉腔50的分解示意图。如图1所示,一个实施例中,激光波长测量系统100包括分光装置、薄型斐索干涉腔20、第一柱面镜
30、第一线列探测器40、厚型斐索干涉腔50、第二柱面镜60和第二线列探测器70。分光装置用于将待测激光分成呈预设角度布置且分光比为50:50的反射光束和透射光束,反射光束和透射光束均为平行光束。薄型斐索干涉腔20、第一柱面镜30和第一线列探测器40依次设置于反射光束的下游且均与反射光束垂直。厚型斐索干涉腔50、第二柱面镜60和第二线列探测器70依次设置于透射光束的下游且均与透射光束垂直,薄型斐索干涉腔20的厚度小于厚型斐索干涉腔50的厚度。这里的薄型斐索干涉腔20是指厚度较薄的斐索干涉腔,例如厚度在0.05-2mm之间,具体可以是0.05mm、1mm或2mm。厚型斐索干涉腔50是指厚度较厚的斐索干涉腔,例如厚度在5-20mm之间,具体可以是5mm、8mm或20mm。如图2所示,厚型斐索干涉腔50包括依次布置的第三平板玻璃51、第三反射膜52、带楔角且呈环形的第二玻璃环53、第四反射膜54和第四平板玻璃55。相似地,薄型斐索干涉腔20包括依次布置的第一平板玻璃、第一反射膜、带楔角且呈环形的第一玻璃环、第二反射膜和第二平板玻璃。上述各个反射膜为高反射率膜。本文中所说的薄型斐索干涉腔20和厚型斐索干涉腔50的厚度是指其工作区域内(也即镀膜区域,例如图2中第三反射膜和第四反射膜所对应于的区域)的玻璃环的小端的厚度,如图2中标识的厚型斐索干涉腔50的。反射光束经薄型斐索干涉腔20和第一柱面镜30后在第一线列探测器40上形成第一干涉条纹,第一线列探测器40用于测量第一干涉条纹的相位和周期。透射光束经厚型斐索干涉腔50和第二柱面镜60后在第二线列探测器70上形成第二干涉条纹,第二线列探测器70用于测量第二干涉条纹的相位和周期。具体地,反射光束入射到薄型斐索干涉腔20后形成条纹间距较小的干涉图样,再进入第一柱面镜30,第一柱面镜30将上述干涉图样进行汇聚,提高干涉图样的条纹的对比度,然后正入射到第一线列探测器40,在第一线列探测器40上形成第一干涉条纹,第一系列探测器将第一干涉条纹转换成电信号,以便探测第一干涉条纹的相位和周期。第二干涉条纹的探测过程原理与上述第一干涉条纹的探测原理相同,区别仅在于投射光束在入射到厚型斐索干涉腔50后形成条纹间距较大的干涉图样。
24.通过上述实施例的激光波长测量系统100可以探测到经过薄型斐索干涉腔20和厚型斐索干涉腔50的干涉条纹的相位和周期,再结合标定的薄型斐索干涉腔20和厚型斐索干涉腔50的厚度和角度,就可以利用薄型斐索干涉腔20在较大光谱范围内粗略地测量波长值(可探测的光谱范围由斐索干涉腔的内部镀膜的波长反射范围以及线列探测器可探测的波长范围决定,在较大光谱范围内用厚型斐索干涉腔50测量波长,无法准确定位干涉条纹的位相,从而无法直接使用厚腔测量波长),作为厚型斐索干涉腔50的参考进行迭代计算,可以提高波长的测量的精度,并且本测量系统属于双斐索腔的测量系统,因此测量速度较快。即本实施例的激光波长测量系统100采用两种厚度的斐索干涉腔实现了较宽光谱范围内激光波长的快速、便捷测量,同时,相较于传统斐索波长计具有更高的测量精度,且无需参考光源。
25.一个实施例中,采用本实施例的激光波长测量系统100所测得的最终波长的测量精度可以达到10-7
量级。
26.进一步的一个实施例中,如图1所示,分光装置包括中心对齐于同一直线且依次布置的光纤11、光纤准直器12和离轴抛物面反射镜13,离轴抛物面反射镜13的焦点与光纤准直器12的出射端重合,离轴抛物面反射镜13用于将从光纤准直器12射出的发散光束转变为
平行光束。分光装置还包括位于平行光束下游的分光器14,用于将平行光束分为反射光束和透射光束,即分光比为50:50的反射光束和透射光束。这里离轴抛物面反射镜13的角度根据其离轴角参数决定,使其反射出的光束转换成平行光束。分光器14与离轴抛物面反射镜13的出射光束呈一定角度布置(非垂直),形成反射光束和透射光束。
27.一个实施例中,光纤11选为熔融石英光纤,待测激光从熔融石英光纤进入光纤准直器12,由光纤准直器12汇聚成发散角度较小的激光信号,汇聚后的激光信号扩束后斜入射到离轴抛物面反射镜13,使得激光信号转变为平行光束,从而使后续光信号具有平面波前。
28.由于斐索干涉腔对镜片表面平行度具有极高的要求,表面的不平整会影响不同波长的测量结果精度,本实施例可以通过调节各个部件的角度和位置,可以选取到薄型斐索干涉腔20和厚型斐索干涉腔50最平整的镜片表面位置和最清晰的干涉条纹用于测量,从而可以保证测量结果更准确。
29.图4是根据本发明一个实施例的激光波长计算方法的流程图。本发明还提供了一种用于上述激光波长测量系统100的激光波长计算方法,如图4所示,一个实施例中,该方法包括:步骤s100,根据第一线列探测器40测得的第一干涉条纹的周期p和预先标定的薄型斐索干涉腔20的劈尖的第一角度α1计算待测激光的第一波长值。
30.步骤s200,根据第一线列探测器40测得第一干涉条纹的阵列零单元处的第一相位ф1和第一波长值计算薄型斐索干涉腔20的第一厚度。阵列零单元就是薄型斐索干涉腔20的第一厚度所对应的第一干涉条纹的位置,第一厚度即第一玻璃环的小端的厚度。
31.步骤s300,根据第一角度α1、第一厚度、第一波长值和第一相位ф1计算第一干涉条纹的第一级次m以及待测激光的第二波长值。
32.步骤s400,根据第二线列探测器70测得的第二干涉条纹的阵列零单元处的第二相位ф2、第一级次m和第二波长值计算待测激光的第三波长值,并将第三波长值作为待测激光的最终波长值。
33.由干涉公式(其中m为干涉级次,λ为激光波长,n为干涉腔折射率,d为干涉腔厚度)可知,d越小,干涉腔对应干涉条纹的最大级次也越小,而最终波长精度为1/100m也越小,如只用单个1mm厚度为干涉腔最高只能达到10-5
量级的精度。由于薄型斐索干涉腔20的厚度小,因此单独使用厚度较小的薄型斐索干涉腔20测量的激光波长的精度不高。可探测的光谱范围由斐索干涉腔的内部镀膜的波长反射范围以及线列探测器可探测的波长范围决定,在较大光谱范围内用厚型斐索干涉腔50测量激光波长,无法准确定位干涉
条纹的位相,从而无法直接使用厚腔测量波长内粗略测量的波长值。
34.本技术中,先利用薄型斐索干涉腔20在较大光谱范围内粗略地测量波长值,在利用这个粗略的波长值作为厚型斐索干涉腔50的参考进行迭代计算,实现了较宽光谱范围内激光波长的快速、便捷测量,同时,相较于传统斐索波长计具有更高的测量精度,且无需参考光源。
35.一个实施例中,最终波长的测量精度可以达到10-7
量级。
36.图5是根据本发明一个实施例的激光波长测量系统100与迈克尔逊波长计的所测得的波长值精度差值图。图5中的横坐标为波长,单位为nm,纵坐标为波长值精度的差值,单位为pm(10-12
米)。对比所用的迈克尔逊波长计是一种标准波长计,采用迈克尔逊干涉原理,通过移动干涉腔位置,使干涉条纹在一定范围内移动,通过光电探测器测得标准he-ne激光器的干涉条纹和待测激光的干涉条纹的位移,将两个位移结果对比可以计算出待测波长和标准波长的关系,从而得到待测波长值。此波长计具有精度高达
±
0.2ppm(ppm表示百万分之一)的优点,但由于使用的动态结构需要通过内部结构循环扫描,所以测量速度较慢,即使目前最好的迈克尔逊波长计也只有5hz,而采用斐索干涉腔的波长计测量速率可达1khz或更高。在选取的波段范围内(1270nm-1360nm,1525nm-1605nm),波长值精度的差值在
±
0.0004nm以内,绝对精度低于3*10-7
,也即0.3ppm,假设波长为1500nm,绝对精度为0.3ppm时,误差为1500*3*10-7
nm。
37.一个实施例中,激光波长计算方法包括以下步骤:利用已知波长的激光标定薄型斐索干涉腔20的劈尖的第一角度α1。具体地,利用线列探测器对经过薄型斐索干涉腔20的已知波长的激光(波长为)进行测量,测得其干涉图样的条纹周期p1,然后将周期p1代入以下公式(1)可以计算出第一角度α1。
38.ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中tan为正切函数。
39.将上一步计算出的第一角度α1以及测得的第一干涉条纹的周期p代入以下公式(2)计算第一波长值:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)将第一波长值和测得的第一相位ф1代入以下公式(3)计算第一厚度:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中,int()为取整函数。
40.根据以下公式(4)计算第一级次m:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
根据第二角度α2、第一厚度和第一相位ф1计算与第一厚度所对应的第一干涉条纹的第一条纹厚度。
41.根据以下公式(5)计算第二波长值:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)根据以下公式(6)计算厚型斐索干涉腔50的第二厚度:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)根据第二厚度、第二相位ф2和预先标定的厚型斐索干涉腔50的劈尖的第二角度α2计算与第二厚度所对应的第二干涉条纹的第二条纹厚度。
42.根据以下公式(7)计算第二干涉条纹的第二级次m:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)根据以下公式(8)计算第三波长:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)本发明还提供了一种计算系统,包括存储器和处理器,存储器内存储有控制程序,控制程序被处理器执行时用于实现根据上述任一项的激光波长计算方法。处理器可以是一个中央处理单元(central processing unit,简称cpu),或者为数字处理单元等等。处理器通过通信接口收发数据。存储器用于存储处理器执行的程序。存储器是能够用于携带或存储具有指令或数据结构形式的期望的程序代码并能够由计算机存取的任何介质,也可以是多个存储器的组合。上述计算程序可以从计算机可读存储介质下载到相应计算/处理设备或者经由网络(例如因特网、局域网、广域网和/或无线网络)下载到计算机或外部存储设备。
43.至此,本领域技术人员应认识到,虽然本文已详尽示出和描述了本发明的多个示例性实施例,但是,在不脱离本发明精神和范围的情况下,仍可根据本发明公开的内容直接确定或推导出符合本发明原理的许多其他变型或修改。因此,本发明的范围应被理解和认定为覆盖了所有这些其他变型或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1