单线激光雷达与多线激光雷达动态联合标定方法
1.本发明属于自动驾驶技术领域,尤其涉及一种单线激光雷达与多线激光雷达动态联合标定方法。
背景技术:
2.随着自动驾驶汽车的研究不断深入和产业化不断加快,目前智能车辆的控制算法已经比较成熟,从而提高了对智能汽车周围行人、车辆等环境感知数据输入的要求。解决途径之一是增加车辆传感器,这样就不得不进行传感器间的标定,将传感器数据进行匹配,为后续的识别和预测算法提供可靠的数据支撑。对于单线激光雷达与多线激光雷达来说,其标定方法一般采用求解坐标转化矩阵,将单线激光雷达与多线激光雷达转换到同一个基坐标系或将单线激光雷达坐标系转换到多线激光雷达坐标系。这种求解方法都对单线激光雷达与多线激光雷达的安装精度和两者的位置测量精度要求很高,而且求得的坐标转化矩阵误差较大。
技术实现要素:
3.本发明的目的在于提出一种单线激光雷达与多线激光雷达动态联合标定方法,利用动态标定板,采集单线激光雷达与多线激光雷达数据,采用统计分析的方法将坐标变换矩阵中的旋转角和位移的求解过程解耦,而且不需要测量两者间相对位置,快速完成标定,并保证标定质量。
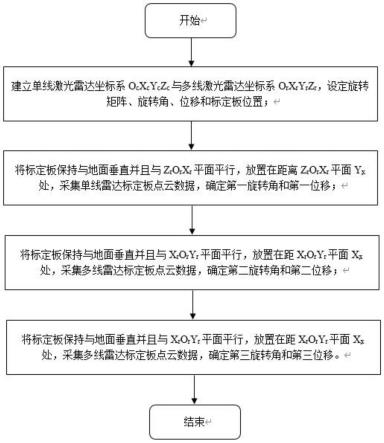
4.为实现上述目的,本发明提供了一种单线激光雷达与多线激光雷达动态联合标定方法,包括以下步骤:建立单线激光雷达坐标系ocxcyczc与多线激光雷达坐标系orxryrzr,确定旋转矩阵、旋转角、位移和标定板位置;
5.将标定板保持与地面垂直并且与zrorxr平面平行,放置在距离zrorxr平面y
x
处,采集单线雷达标定板点云数据,确定第一旋转角和第一位移;
6.将标定板保持与地面垂直并且与xroryr平面平行,放置在距xroryr平面x
x
处,采集多线雷达标定板点云数据,确定第二旋转角和第二位移;
7.将标定板保持与地面垂直并且与xroryr平面平行,放置在距xroryr平面x
x
处,采集多线雷达标定板点云数据,确定第三旋转角和第三位移。
8.可选的,将所述单线激光雷达坐标系通过旋转和位移转换至所述多线激光雷达坐标系,获得单线激光雷达相对于多线激光雷达的第一旋转角、第二旋转角、第三旋转角,及第一位移、第二位移、第三位移。
9.可选的,所述单线激光雷达坐标系转换至所述多线激光雷达坐标系,则旋转矩阵m和位移矩阵l表示如下,
[0010][0011][0012]
其中,(xc,yc,zc,1)
t
为单线激光雷达扫描得到的任意点,(xr,yr,zr,1)
t
为(xc,yc,zc,1)
t
转换到多线激光雷达坐标系;
[0013]
所述单线激光雷达坐标系转换至所述多线激光雷达坐标系的计算过程为:(xr,yr,zr,1)
t
=lm(xc,yc,zc,1)
t
。
[0014]
可选的,将标定板保持与地面垂直并且与zrorxr平面平行,包括:将标定板保持与地面垂直,将标定板绕orzr轴旋转第一角度,采集多线雷达俯仰角为0度时标定板上点云数据,采用统计分析的方法统计点云数据的y坐标的方差,设置第一距离方差值,当y坐标的方差小于所述第一距离方差值,则统计此时标定板上点云数据y坐标的第一均值,并判断此时标定板与zrorxr平面平行。
[0015]
可选的,基于所述标定板与zrorxr平面平行,将标定板在zc处平行地面沿着orzr轴旋转第一角度,并保持第一旋转角沿标定板处于的平面移动,获取每次移动后单线激光雷达测得的标定板上点云数据;基于所述标定板上点云数据,统计标定板上点云数据中反射点到单线激光雷达的距离信息,获取第二均值,设置第二距离方差值,当距离均值小于所述第二距离方差值,则获得第一旋转角为第一角度,第一位移为第一均值与第二均值的差。
[0016]
可选的,将标定板保持与地面垂直并且与xroryr平面平行,包括:将标定板保持与地面垂直绕orzr轴旋转,采集多线雷达俯仰角为0度时标定板上点云数据,采用统计分析的方法统计点云数据的x坐标的方差,设置第三距离方差值,当x坐标的方差小于所述第三距离方差值,则统计此时标定板上点云数据x坐标的第三均值,并判断此时标定板与xroryr平面平行。
[0017]
可选的,基于所述标定板与xroryr平面平行,将标定板在zc处平行地面沿着orzr轴旋转第二角度,并保持第二旋转角沿标定板处于的平面移动,获取每次移动后单线激光雷达测得的标定板上点云数据;基于所述标定板上点云数据,统计标定板上点云数据中反射点到单线激光雷达的距离信息,获取第四均值,设置第四距离方差值,当距离均值小于所述第四距离方差值,则获得第二旋转角为第二角度,第二位移为第三均值与第四均值的差。
[0018]
可选的,基于所述标定板与xroryr平面平行,将标定板保持与地面垂直绕orzr轴旋转第二角度,采集多线雷达俯仰角为0度时标定板上点云数据,采用统计分析的方法统计点云数据的x坐标的方差,设置第五距离方差值,当x坐标的方差小于所述第五距离方差值,则统计此时标定板上点云数据x坐标的第五均值;所述标定板沿oryr方向平面移动,获取第一位移的均值,当第一位移均值小于第五均值时,则zroryr平面垂直平分标定板;将标定板保持与地面垂直绕orzr轴旋转第三角度,采集单线雷达测得的标定板上点云数据,统计点云数
据的y坐标的均值小于第五均值时,所述第三旋转角为第三角度,所述第三位移为第五均值与zc的差。
[0019]
本发明技术效果:本发明公开了一种单线激光雷达与多线激光雷达动态联合标定方法,一方面不需要测量单线激光雷达与多线激光雷达相对位置关系,减少测量成本和标定难度;另一方面,采用动态标定的方法,将单线激光雷达与多线激光雷达坐标转换矩阵的参数彼此间解耦并分别确定,简化了坐标转换矩阵的参数的求解过程,对每个参数的求解精度可控。
附图说明
[0020]
构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
[0021]
图1为本发明实施例单线激光雷达与多线激光雷达动态联合标定方法的流程示意图;
[0022]
图2为本发明实施例单线激光雷达与多线激光雷达坐标系示意图;
[0023]
图3为本发明实施例待标定平台和标定板的位置的第一示意图;
[0024]
图4为本发明实施例待标定平台和标定板的位置的第二示意图;
[0025]
其中,1、待标定平台;2、单线激光雷达;3、多线激光雷达;4、标定板。
具体实施方式
[0026]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
[0027]
需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
[0028]
如图1所示,本实施例中提供一种单线激光雷达与多线激光雷达动态联合标定方法,包括以下步骤:
[0029]
建立单线激光雷达坐标系ocxcyczc与多线激光雷达坐标系orxryrzr,确定旋转矩阵、旋转角、位移和标定板位置;
[0030]
将标定板保持与地面垂直并且与zrorxr平面平行,放置在距离zrorxr平面y
x
处,采集单线雷达标定板点云数据,确定第一旋转角和第一位移;
[0031]
将标定板保持与地面垂直并且与xroryr平面平行,放置在距xroryr平面x
x
处,采集多线雷达标定板点云数据,确定第二旋转角和第二位移;
[0032]
将标定板保持与地面垂直并且与xroryr平面平行,放置在距xroryr平面x
x
处,采集多线雷达标定板点云数据,确定第三旋转角和第三位移。
[0033]
进一步优化方案,将所述单线激光雷达坐标系通过旋转和位移转换至所述多线激光雷达坐标系,获得单线激光雷达相对于多线激光雷达的第一旋转角、第二旋转角、第三旋转角,及第一位移、第二位移、第三位移。
[0034]
进一步优化方案,所述单线激光雷达坐标系转换至所述多线激光雷达坐标系,则旋转矩阵m和位移矩阵l表示如下,
[0035][0036][0037]
其中,(xc,yc,zc,1)
t
为单线激光雷达扫描得到的任意点,(xr,yr,zr,1)
t
为(xc,yc,zc,1)
t
转换到多线激光雷达坐标系;
[0038]
所述单线激光雷达坐标系转换至所述多线激光雷达坐标系的计算过程为:(xr,yr,zr,1)
t
=lm(xc,yc,zc,1)
t
。
[0039]
进一步优化方案,将标定板保持与地面垂直并且与zrorxr平面平行,包括:将标定板保持与地面垂直,将标定板绕orzr轴旋转第一角度,采集多线雷达俯仰角为0度时标定板上点云数据,采用统计分析的方法统计点云数据的y坐标的方差,设置第一距离方差值,当y坐标的方差小于所述第一距离方差值,则统计此时标定板上点云数据y坐标的第一均值,并判断此时标定板与zrorxr平面平行。
[0040]
进一步优化方案,基于所述标定板与zrorxr平面平行,将标定板在zc处平行地面沿着orzr轴旋转第一角度,并保持第一旋转角沿标定板处于的平面移动,获取每次移动后单线激光雷达测得的标定板上点云数据;基于所述标定板上点云数据,统计标定板上点云数据中反射点到单线激光雷达的距离信息,获取第二均值,设置第二距离方差值,当距离均值小于所述第二距离方差值,则获得第一旋转角为第一角度,第一位移为第一均值与第二均值的差。
[0041]
进一步优化方案,将标定板保持与地面垂直并且与xroryr平面平行,包括:将标定板保持与地面垂直绕orzr轴旋转,采集多线雷达俯仰角为0度时标定板上点云数据,采用统计分析的方法统计点云数据的x坐标的方差,设置第三距离方差值,当x坐标的方差小于所述第三距离方差值,则统计此时标定板上点云数据x坐标的第三均值,并判断此时标定板与xroryr平面平行。
[0042]
进一步优化方案,基于所述标定板与xroryr平面平行,将标定板在zc处平行地面沿着orzr轴旋转第二角度,并保持第二旋转角沿标定板处于的平面移动,获取每次移动后单线激光雷达测得的标定板上点云数据;基于所述标定板上点云数据,统计标定板上点云数据中反射点到单线激光雷达的距离信息,获取第四均值,设置第四距离方差值,当距离均值小于所述第四距离方差值,则获得第二旋转角为第二角度,第二位移为第三均值与第四均值的差。
[0043]
进一步优化方案,基于所述标定板与xroryr平面平行,将标定板保持与地面垂直绕orzr轴旋转第二角度,采集多线雷达俯仰角为0度时标定板上点云数据,采用统计分析的方法统计点云数据的x坐标的方差,设置第五距离方差值,当x坐标的方差小于所述第五距离方差值,则统计此时标定板上点云数据x坐标的第五均值;所述标定板沿oryr方向平面移动,
获取第一位移的均值,当第一位移均值小于第五均值时,则zroryr平面垂直平分标定板;将标定板保持与地面垂直绕orzr轴旋转第三角度,采集单线雷达测得的标定板上点云数据,统计点云数据的y坐标的均值小于第五均值时,所述第三旋转角为第三角度,所述第三位移为第五均值与zc的差。
[0044]
步骤1:建立单线激光雷达与多线激光雷达自身坐标系,确定坐标变换矩阵、旋转角、位移和标定板位置:
[0045]
步骤1.1:分别以待标定平台上的单线激光雷达与多线激光雷达的各自中心位置为原点建立ocxcyczc和orxryrzr坐标系。
[0046]
步骤1.2:将orxryrzr坐标系通过旋转和位移转换到ocxcyczc坐标系,确定毫米波雷达相对视觉相机的三个旋转角为α,β和γ,位移为x,y和z。
[0047]
步骤1.3:m为单线激光雷达坐标系转换到多线激光雷达坐标系的旋转矩阵,l为其对应的位移矩阵,则
[0048][0049][0050]
记单线激光雷达扫描得到的任意点表示为(xc,yc,zc,1)
t
,记(xc,yc,zc,1)
t
转换到多线激光雷达坐标系的表示为(xr,yr,zr,1)
t
,则
[0051]
(xr,yr,zr,1)
t
=lm(xc,yc,zc,1)
t
。
[0052]
步骤1.4:将待标定平台和标定板置于同一水平面上,保证标定板在动态平移和旋转量可控。
[0053]
步骤2:将标定板保持与地面垂直并与zrorxr平面平行,放置在距zrorxr平面y
x
处,采集点云数据,确定α和y:
[0054]
步骤2.1:将标定板保持与地面垂直绕orzr轴旋转一定角度γ1,采集多线雷达俯仰角为0度时标定板上点云数据,统计点云数据的y坐标的方差小于σ1时,记此时点云数据的y坐标的均值为μ
y1
,认为此时标定板与zrorxr平面平行;
[0055]
步骤2.2:在完成调整标定板角度与zrorxr平面平行后,在以标定板上zc处平行于地面的轴线旋转一定角度α1,并保持α1沿标定板所在平面移动,采集每次移动后单线激光雷达测得的标定板上点云数据;
[0056]
步骤2.3:统计标定板上点云数据中反射点到单线激光雷达的距离信息,并记其最小值的均值为μ
y2
,当距离信息的方差小于σ2时,此时所求的旋转角α=α1,所求的位移y=μ
y1-μ
y2
。
[0057]
步骤3、将标定板保持与地面垂直并与xroryr平面平行,放置在距xroryr平面x
x
处,采集点云数据,确定β和x;
[0058]
步骤3.1:将标定板保持与地面垂直绕orzr轴旋转一定角度γ2,采集多线雷达俯仰角为0度时标定板上点云数据,统计点云数据的x坐标的方差小于σ3时,记此时点云数据的x坐标的均值为μ
x1
,认为此时标定板与xroryr平面平行;
[0059]
步骤3.2:在完成调整标定板角度与xroryr平面平行后,在以标定板上zc处平行于地面的轴线旋转一定角度β1,并保持β1沿标定板所在平面移动,采集每次移动后单线激光雷达测得的标定板上点云数据;
[0060]
步骤3.3:统计标定板上点云数据中反射点到单线激光雷达的距离信息,并记其最小值的均值为μ
x2
,当距离信息的方差小于σ4时,此时所求的旋转角β=β1,所求的位移x=μ
x1-μ
x2
。
[0061]
步骤4、将标定板保持与地面垂直,放置在距xroryr平面x
x
处,采集点云数据,确定γ和z;
[0062]
步骤4.1:将标定板保持与地面垂直绕orzr轴旋转一定角度γ2,采集多线雷达俯仰角为0度时标定板上点云数据,统计点云数据的x坐标的方差小于σ5时,认为此时标定板与xroryr平面平行;
[0063]
步骤4.2:保持标定板旋转角度γ2,沿oryr方向移动标定板,统计点云数据的y坐标的均值小于μ
z1
时,认为此时标定板被zroryr平面垂直平分;
[0064]
步骤4.3:将标定板被zroryr平面垂直平分位置沿oryr方向移动所求位移y,将标定板保持与地面垂直绕orzr轴旋转一定角度γ3,采集单线雷达测得的标定板上点云数据,统计点云数据的y坐标的均值小于μ
z2
时,此时所求的旋转角γ=γ3,所求的位移z=z
r-zc。
[0065]
图2是单线激光雷达与多线激光雷达坐标系示意图,其中oczc指向单线激光雷达实际扫描平面正上方,ocyc指向此时实际扫描面内y轴方向,ocxc指向此时实际扫描面内x轴方向;orzr指向多线激光雷达俯仰角为0度时实际扫描面正上方,oryr指向此时实际扫描面内y轴方向,orxr指向此时实际扫描面内x轴方向。
[0066]
其中,将坐标系ocxcyczc沿轴ocxc旋转α,沿轴ocyc旋转β,沿轴oczc旋转γ,沿轴ocxc移动x,沿轴ocyc移动y,沿轴oczc移动z,即可变换为坐标系orxryrzr,故α,β,γ为所求坐标转换矩阵的旋转角,x,y,z为所求坐标转换矩阵的位移量。
[0067]
图3是待标定平台和标定板的位置的示意图1,其中y
x
指标定板到多线激光雷达的距离,y2指标定板到单线激光雷达的距离,y1指单线激光雷达到多线激光雷达的距离,即y=y1=y
x-y2。
[0068]
以上距离指沿轴oryr方向的距离,且y
x
的距离选择不能过远;标定板的尺寸应满足可反应单线激光雷达和多线激光雷达的点云信息。
[0069]
图4是待标定平台和标定板的位置的示意图2,其中x
x
指标定板到多线激光雷达的距离,x2指标定板距单线激光雷达的距离,x1指单线激光雷达到多线激光雷达的距离,即x=x1=x
x-x2。
[0070]
以上距离指沿轴orxr方向的距离,且x
x
的距离选择不能过远。
[0071]
以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1