基于混合卡方检测的GPS模块/星敏感器姿态精度评估方法
基于混合卡方检测的gps模块/星敏感器姿态精度评估方法
技术领域
1.本发明涉及卫星/天文导航的技术领域,具体是涉及一种基于混合卡方检测的gps模块/星敏感器姿态精度评估方法。
背景技术:
2.随着导航定位定姿及其相关领域的快速发展,许多不同种类的导航技术诸如卫星导航、天文导航等已被应用到城市、海洋、航空等各个领域。目前,基于gps模块和北斗的卫星导航技术系统已经形成了动态且全面的全球范围内三维立体导航定位定姿服务体系,能够快速获取陆地、海洋及空中目标的精确位置。位置确定和姿态确定通常是两个独立的过程,在组合导航过程中,它们的相关性往往被忽略。由于单一导航系统的局限性,可以将两种或多种导航技术结合在一起,提供导航信息,组合构成一个完整的精度和稳定性更有保障的集成导航系统。
3.在现有的技术背景下,卫星导航和惯性导航系统相结合的组合导航系统是最常见和应用最广泛的组合导航方案。然而,这类方法存在两个问题。首先,惯性测量设备的测量误差会随时间累积,直至严重影响系统精度。虽然可以通过相关技术手段进行校正,但校正后的速度不能与目标的飞行速度精确匹配。因此,随着飞行距离越长或定位服务时间越长,瞬时姿态计算的精度会变得越低,因此在中长途导航过程中将受到严重限制。其次,惯性测量设备是一种高损耗的设备,其制造和维护成本相当高。大规模操作的测量精度要求越高,成本越高,成本性能越低。因此,研究多级、多平台定位和定姿的新模型、新方法、新技术,对于提高空中目标的实时测控能力,降低制造和维护成本具有重要意义。星敏感器是一种在各类航天飞行器设计运行中得到越来越广泛认可和应用的高精度姿态测量仪器。它不仅具有小体积、高精度和低功耗等显著优势,而且其测量误差不会随着时间推移而始终积累,对提升长距离导航场景下的定位定姿精度有帮助。因此可以弥补和改进其他导航系统在这方面的误差。
技术实现要素:
4.发明目的:针对以上缺点,本发明公开的一种基于混合卡方检测的gps模块/星敏感器姿态精度评估方法,能够gps模块与星敏感器进行姿态精度评估,从而实现在gps模块或者星敏感器任一传感器在相对失效情况下的误差补偿,提升滤波的抗差性能。
5.技术方案:为解决上述问题,本发明提供一种基于混合卡方检测的gps模块/星敏感器姿态精度评估方法,包括以下步骤:
6.(1)获取飞行器中设置的gps模块、星敏感器的姿态信息;
7.(2)采用新息χ2检测分别对gps模块、星敏感器的姿态信息进行精度评估,分别获取对应的测量新息检验统计量,通过获取的测量新息检验统计量判断gps模块、星敏感器的输出数据是否存在异常;
8.(3)采用状态χ2检测对gps模块、星敏感器的姿态组合信息进行精度评估,获取组
合状态检验统计量,通过获取的组合状态检验统计量判断gps模块与星敏感器组合输出数据是否存在异常;
9.(4)当步骤(1)或者步骤(2)中输出数据存在异常情况,则构造等价权因子;具体为:
[0010][0011]
ω=diag[ω1,ω2,
…
,ωn]
[0012]
式中,ω为等价权因子,ωi为各个时刻的等价权因子,i=1,2
……
n,n为正整数;t
i,j
(k)为i时刻第j次卡方检测的检验统计量,j=1,2,3;当j=1时,对应采用新息χ2检测获得gps模块测量新息检验统计量t
i,1
(k);当j=2时,对应采用新息χ2检测获得星敏感器测量新息检验统计量t
i,2
(k);当j=3时,对应采用状态χ2检测获取组合状态检验统计量t
i,3
(k);td为边界条件中的边界值;k为状态;
[0013]
再根据等价权因子获取等价协方差矩阵,具体为:
[0014][0015]
式中,为等价协方差矩阵;v1(k)为gps模块观测噪声的协方差矩阵;
[0016]
(5)根据等价协方差矩阵构造滤波增益方程和状态估计方程,采用卡尔曼滤波方法解算得到最终的姿态结果。
[0017]
进一步的,步骤(2)具体包括以下步骤:
[0018]
(2.1)采用新息χ2检测分别对gps模块、星敏感器的姿态信息进行精度评估,获取测量新息公式为:
[0019][0020][0021]
式中,v1(k)为gps模块测量新息;v2(k)为星敏感器测量新息;z1(k)为gps模块观测向量矩阵;z2(k)为星敏感器观测向量矩阵;为gps模块观测向量预测值;为星敏感器观测向量预测值;h1为gps模块观测矩阵;h2为星敏感器观测矩阵;k为状态;k+1指k状态的后一状态,k-1指k状态的前一状态;
[0022]
(2.2)根据测量新息获取测量新息检验统计量,公式为:
[0023]
t(k)=v(k)
t
c(k)-1
v(k)
[0024]
式中,c(k)为测量新息的协方差矩阵;分别代入不同时刻i下gps模块对应的v1(k)、c1(k)获得gps模块测量新息检验统计量t
i,1
(k);代入不同时刻i下星敏感器对应的v2(k)、c2(k)获得星敏感器测量新息检验统计量t
i,2
(k);其中:
[0025]
c1(k)=h1p1(k|k-1)h
1t
+v1(k)
[0026]
c2(k)=h2p2(k|k-1)h
2t
+v2(k)
[0027]
式中,p1(k|k-1)为gps模块状态协方差矩阵、p2(k|k-1)为星敏感器状态协方差矩阵;v1(k)为gps模块观测噪声的协方差矩阵;v2(k)为星敏感器观测噪声的协方差矩阵;
[0028]
(2.3)设定观测值出现异常情况的边界条件;
[0029]
td~χ
α2
(t)
[0030]
式中,α为显著性水平;t为自由度;
[0031]
通过分别比较两个测量新息检验统计量与边界值判断输出数据是否异常,若测量新息统计量小于或等于边界值,则认定输出数据无异常,否则认定存在异常。
[0032]
进一步的,步骤(3)具体包括以下步骤:
[0033]
(3.1)基于星敏感器的姿态信息设定状态量,公式为:
[0034][0035]
式中,x为状态向量矩阵;φ表示星敏感器姿态角;θ表示星敏感器角速度;ψ表示星敏感器角加速度;建立状态方程为:
[0036]
x(k+1)=fx(k)+w(k)
[0037]
式中,f为状态转换矩阵;w为系统噪声;
[0038]
(3.2)基于gps模块的姿态信息设定观测向量,公式为:
[0039][0040]
式中,z为观测向量矩阵;表示gps模块姿态角;θ表示gps模块角速度;ψ表示gps模块角加速度;建立观测方程,公式为:
[0041]
z(k)=h1x(k)+v1(k)
[0042]
(3.3)采用状态χ2检测对gps模块、星敏感器的姿态信息进行精度估计,获取第一状态估计量第二状态估计量并作差,最终获取组合状态检验统计量t3(k),具体为:
[0043][0044][0045][0046]
t3(k)=β(k)r(k)-1
β(k)
[0047]
式中,k
′
为原始滤波增益;r(k)=e{β(k)β
t
(k)};t3(k)为组合状态检验统计量;t
i,3
(k)为不同时刻i的t3(k)值;
[0048]
(3.4)通过比较组合状态检验统计量与边界值判断输出数据是否异常,若组合状态检验统计量小于或等于边界值,则认定输出数据无异常,否则认定存在异常。
[0049]
进一步的,步骤(4)中构造滤波增益方程为:
[0050][0051]
式中,k为滤波增益;p1(k|k-1)为gps模块状态协方差矩阵;h1为gps模块观测矩阵;
[0052]
状态状态估计方程为:
[0053][0054]
式中,表示状态估计量;表示观测向量预测值。
[0055]
进一步的,步骤(1)中获取gps模块、星敏感器的姿态信息具体为:基于直接法利用两个当前历元的不相关的基线向量计算gps模块的姿态信息;根据星敏感器获取到的星图与星历进行对比并解算获得载体相对于惯性系的姿态信息。
[0056]
进一步的,td数值设定为0.05。
[0057]
此外,本发明还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利上述方法的步骤。一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法的步骤。
[0058]
有益效果:本发明所述方法相对于现有技术,其显著优点是:1、通过结合新息χ2检测法和状态χ2检测法,设计了一种基于混合χ2检测的姿态精度评估算法,本方法既可以针对状态突变造成的误差突增,利用新息χ2检测法对其噪声特性准确识别,从而进行故障排除或抗差处理;又能够针对缓增误差的识别,采用状态χ2检测法对滤波器得到的状态和无测量更新的状态递推器获得的状态进行检测,从而判断系统是否存在异常情形;综合两种检测方法优势互补实现了gps模块与星敏感器姿态精度评估与抗差性能的提升;2、通过结合混合χ2检测,设计在gps模块或者星敏感器任一传感器在相对失效情况下,构造等价观测协方差矩阵,并将构造的等价观测协方差矩阵加入卡尔曼滤波增益中,实现相对失效情况下的误差补偿,提升滤波的抗差性能,体现了其对比标准卡尔曼滤波方法在失效情形下的优越性;3、本发明综合gps模块和星敏感器,gps模块系统有较高的稳定性和定位精度,在测姿方面也有良好前景,而星敏感器具有高定姿精度和不产生累积误差的优势,gps模块和星敏感器的组合能够在定姿方面优势互补。
附图说明
[0059]
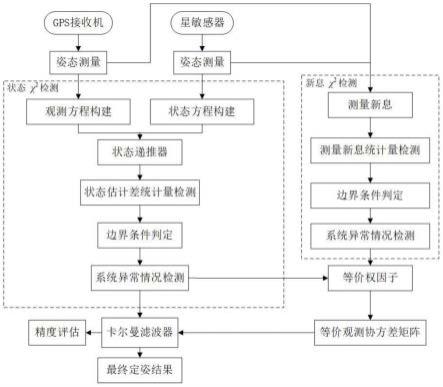
图1所示为本发明所述的评估方法的流程图;
[0060]
图2所示为本发明实施例中设定的飞行器空中轨迹图;
[0061]
图3所示为采用本发明所述的评估方法对应输出的姿态角误差图。
具体实施方式
[0062]
下面结合附图对本发明的技术方案进一步说明。
[0063]
设定载有gps模块、星敏感器的飞行器在空中的运动轨迹如图2所示。如图1所示,本发明所述的一种基于混合卡方(χ2)检测的gps模块/星敏感器姿态精度评估方法,具体的步骤包括:
[0064]
步骤一、获取gps模块、星敏感器的姿态信息;
[0065]
具体的,基于直接法利用两个当前历元的不相关的基线向量计算gps模块的姿态角输出,获得姿态信息;对星敏感器获取到的星图与星历进行对比后进而解算获得载体相对于惯性系的姿态信息。
[0066]
步骤二、采用新息χ2检测对姿态信息进行精度评估;具体包括以下步骤:
[0067]
(1)采用新息χ2检测对星敏感器与gps模块的定位与姿态信息进行精度评估,设定gps模块的姿态角输出的姿态测量噪声均方差为0.3
°
,星敏感器输出姿态测量噪声均方差为20
″
。滤波中经过状态估计的测量新息可以表示为:
[0068][0069][0070]
式中,v1(k)为gps模块测量新息;v2(k)为星敏感器测量新息;z1(k)为gps模块观测
向量矩阵;z2(k)为星敏感器观测向量矩阵;为观测向量预测值;为星敏感器观测向量预测值;h1为gps模块观测矩阵;h2为星敏感器观测矩阵;根据实际情况判断,测量新息一般为白噪声序列的形式,基本服从均值为零的正态分布。
[0071]
(2)根据测量新息构造测量新息检验统计量,公式为:
[0072]
t(k)=v(k)
t
c(k)-1
v(k)
[0073]
式中,c(k)为测量新息的协方差矩阵;分别代入不同时刻i下gps模块、星敏感器相对应的v1(k)、v2(k)、c1(k)、c2(k),获得最终的gps模块测量新息检验统计量t
i,1
(k)、星敏感器测量新息检验统计量t
i,2
(k);其中:
[0074]
c1(k)=h1p1(k|k-1)h
1t
+v1(k)
[0075]
c2(k)=h2p2(k|k-1)h
2t
+v2(k)
[0076]
式中,p1(k|k-1)为gps模块状态协方差矩阵、p2(k|k-1)为星敏感器状态协方差矩阵;v1(k)为gps模块观测噪声的协方差矩阵;v2(k)为星敏感器观测噪声的协方差矩阵;
[0077]
通过对测量新息统计量的检测可以反映gps模块、星敏感器输出的观测值是否异常,出现异常情形时,测量新息均值不再为零,可列出如下假设:
[0078][0079]
其中,h0表示系统无异常情况,h1表示gps模块或星敏感器输出出现异常情况。
[0080]
由于t服从自由度为t的χ2分布,该假设可以列为以下形式:
[0081][0082]
(3)设置判定是否出现异常情况的边界条件,公式为:
[0083]
td~χ
α2
(t)
[0084]
式中,td表示边界值;α为显著性水平,td通常设置其取值范围为0.01到0.15,进行姿态精度评估时选择设置为0.05。
[0085]
若t(k)≤td,则认为输出观测值无异常情况;其中,t(k)取t1(k)、t2(k);否则认为存在失效情况;否则认为存在异常情况。
[0086]
步骤三、采用状态χ2检测对gps模块、星敏感器的姿态组合信息进行精度评估;
[0087]
(1)设定状态向量为星敏感器的定姿结果,其中,φ表示星敏感器姿态角;θ表示星敏感器角速度;ψ表示星敏感器角加速度;建立状态方程为:
[0088]
x(k+1)=fx(k)+w(k)
[0089]
式中,x为状态向量矩阵;f为状态转换矩阵;w为系统噪声;
[0090]
(2)设定观测向量为gps模块输出的定姿结果,其中,表示gps模块姿态角;θ表示gps模块角速度;ψ表示gps模块角加速度;建立观测方程,公式为:
[0091]
z(k)=h1x(k)+v1(k)
[0092]
式中,z为组合状态观测向量矩阵;
[0093]
(3)采用状态χ2检测通过对两个状态估计量并作差进行后续的检测,
其中是观测值z(k)通过卡曼尔滤波操作后得到的,而是用先验信息再利用状态递推器递推所得到的。与测量信息相关,会受到系统异常情况的影响,而则反之,两者分别可以表示为:
[0094][0095][0096]
式中,k
′
为原始滤波增益;为递推所得到的;两个估计误差e1(k)、e2(k)可以表示为:
[0097][0098][0099]
两个状态估计量之差可以表示为:
[0100][0101]
β(k)为均值为零的高斯随机向量,其方差表示为;r(k)=e{β(k)β
t
(k)};
[0102]
由此获得组合状态检验统计量:
[0103]
t3(k)=β(k)r(k)-1
β(k)
[0104]
t
i,3
(k)为不同时刻i下的t3(k)值;
[0105]
(4)通过比较组合状态检验统计量与边界值判断gps模块与星敏感器组合输出的观测值是否异常,若t3(k)≤td,则认定输出观测值无异常,否则认定存在异常。
[0106]
步骤四、根据上述两者χ2检测方法的检测结果,当观测值出现异常情况时,通过在卡尔曼滤波过程中构造等价权因子,并将构造的等价观测协方差矩阵加入滤波增益中,对gps模块与星敏感器进行姿态精度评估。具体为:
[0107]
(1)构造等价权因子ω;
[0108][0109]
ω=diag[ω1,ω2,
…
,ωn]
[0110]
式中,ω为等价权因子,ωi为各个时刻的等价权因子,i=1,2
……
n,n为正整数;t
i,j
(k)为i时刻第j次卡方检测的检验统计量,j=1,2,3;当j=1时,对应采用新息χ2检测获得gps模块测量新息检验统计量t
i,1
(k);当j=2时,对应采用新息χ2检测获得星敏感器测量新息检验统计量t
i,2
(k);当j=3时,对应采用状态χ2检测获取组合状态检验统计量t
i,3
(k);td为边界条件中的边界值;k为状态;
[0111]
(2)根据等价权因子构造得到对应的观测值的等价协方差矩阵,具体为:
[0112][0113]
式中,为等价协方差矩阵;
[0114]
将该等价协方差矩阵加入卡尔曼滤波增益,可实现gps模块与星敏感器的相互抗差融合估计。当检测值存在异常情况,通过等价权因子和等价协方差矩阵,由增益k可降低异常分量的权重,从而增强gps模块/星敏感器融合估计卡尔曼滤波的抗差性能。
[0115]
步骤五、根据等价协方差矩阵构造滤波增益方程和状态估计方程;具体的:
[0116]
滤波增益方程为:
[0117][0118]
式中,k为滤波增益;p1(k|k-1)为gps模块状态协方差矩阵;h1为gps模块观测矩阵;k+1指k状态的后一状态,k-1指k状态的前一状态;
[0119]
状态估计方程为:
[0120][0121]
式中,表示最终状态估计量;表示最终观测向量预测值。
[0122]
根据增益k可以动态调整状态量与观测量的权值,从滤波增益方程中可以看出,k值可以通过给出的协方差矩阵初值p0不断迭代更新,从状态估计方程中可以看出,k越小时状态估计的权值将越大,k越大时观测值的权值将越大。
[0123]
通过卡尔曼滤波进行后续组合导航定姿流程,最终解算得到载体的姿态输出,如图3所示,通过上述方式获得载体的姿态输出,包括姿态角、角速度、角加速度。
[0124]
此外,本发明还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利上述方法的步骤。一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法的步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1