一种机载光缆连接故障定位方法及系统与流程
1.本发明涉及一种机载光缆检测技术,特别是一种机载光缆连接故障定位方法及系统。
背景技术:
2.光纤总线具有高带宽、低延时、抗干扰的优势,已越来越多地应用于机载航空电子设备的互联通信中。机载光缆网络由多段光缆组成,它们通过连接器连接组网,连接器的插入损耗和回波损耗会严重影响总线传输性能。因此机载光缆铺设完毕后,需要检查光缆的连接情况,如有插入损耗和回波损耗异常点,需要进行更换维修。
3.目前针对机载光缆检测的方法主要是基于光时域反射仪(otdr)。商用 otdr优势在于系统简单、成本低,但是其空间分辨率较差,仅为分米量级,机载光缆网络中存在连接器仅相距几厘米的情况,otdr无法准确定位故障位置,对检测和排故效率造成严重影响。
4.光频域反射仪(ofdr),优势在于极高的空间分辨率,理论上可以替代 otdr精确定位机载光缆网络中的相距接近的故障点,但是现有的商用ofdr 成本高昂。因此提供一种将ofdr应用于机载光缆网络中,利用高空间分辨率的特点,实现厘米量级的连接器故障定位,提高排故效率。
技术实现要素:
5.本发明的目的在于:针对现有技术存在的otdr空间分辨率最高仅为分米量级,难以精确定位相距仅厘米量级的连接器故障位置问题,同时ofdr有极高的空间分辨率,但是成本高昂的问题,提供一种机载光缆连接故障定位方法及系统。
6.为了实现上述目的,本发明采用的技术方案为:
7.一种机载光缆连接故障定位系统,一种机载光缆连接故障定位系统,配置有偏振接收机、掺铒光纤放大器、第一光纤耦合器、第二光纤耦合器、三端口光纤环形器和待测光纤接口,包括分布式反馈激光器和可调衰减器,分布式反馈激光器被配置为采用多三角波型变化的驱动电流进行频率调谐输出啁啾光,可调衰减器被配置为衰减反射光功率;
8.分布式反馈激光器的输出端与掺铒光纤放大器的输入端连接,掺铒光纤放大器的输出端与第一光纤耦合器的输入端连接,第一光纤耦合器的第一输出端与第二光纤耦合器的输入端连接,第二光纤耦合器的第一输出端与三端口光纤环形器的第一端口连接,三端口光纤环形器的第二端口与待测光纤接口连接,三端口光纤环形器的第三端口与可调衰减器的输入端连接;偏振接收机的第一输入端连接可调衰减器的输出端,其第二输入端连接第二光纤耦合器的第二输出端。
9.作为本发明的优选方案,一种机载光缆连接故障定位系统,还包括第三光纤耦合器、正交接收机以及延迟光纤线,第一光纤耦合器的第二输出端与第三光纤耦合器的输入端连接,第三光纤耦合器的第一输出端与延迟光纤线的一端连接,延迟光纤线的另一端与正交接收机的第一输入端连接,第三光纤耦合器的第二输出端与正交接收机的第二输入端
连接。
10.作为本发明的优选方案,一种机载光缆连接故障定位系统,还包括数字-模拟转换器、模拟-数字转换器和工控机,工控机的输出端与数字-模拟转换器的输入端连接,数字-模拟转换器的输入端与分布式反馈激光器的输入端连接;模拟
‑ꢀ
数字转换器的输入端连接偏振接收机和正交接收机的输出端,其输出端与工控机的输入端连接。
11.作为本发明的优选方案,一种机载光缆连接故障定位系统,第一光纤耦合器、第二光纤耦合器、第三光纤耦合器均采用保偏2
×
2光纤耦合器。
12.作为本发明的优选方案,一种机载光缆连接故障定位系统的方法,包括以下步骤:
13.步骤s1,数字-模拟转换器输出幅度呈三角形周期变化的电压信号u(t);
14.步骤s2,分布式反馈激光器接收所述电压信号u(t),输出频率先正向变化、再反向变化的啁啾光;
15.步骤s3,啁啾光经过掺铒光纤放大器,得到光功率恒定的啁啾光;
16.步骤s4,光功率恒定的啁啾光通过第一光纤耦合器,分为探测光和参考光;
17.步骤s5,探测光通过第二光纤耦合器,分为入射光和第一本振光;参考光通过第三光纤耦合器,分为信号光和第二本振光;
18.步骤s6,入射光通过三端口光纤环形器,进入待测光纤接口,得到背向瑞利散射光;
19.步骤s7,背向瑞利散射光经过可调衰减器进入偏振接收机,第一本振光直接进入偏振接收机,得到电压信号u
rx
(t)、u
ry
(t),其中,u为电压,r代表反射仪,x或y分别代表两个垂直偏振态,t代表采样时间;信号光经过延迟光纤线进入正交接收机,第二本振光直接进入正交接收机,得到电压信号u
ii
(t)、 u
iq
(t),其中,下标第一个字母i代表干涉仪,下标第二个字母i或q分别代表两个正交相位;
20.步骤s8,将电压信号u
rx
(t)、u
ry
(t)、u
ii
(t)和u
iq
(t)输入模拟-数字转换器,转换为数字信号序列u
rx
(k)、u
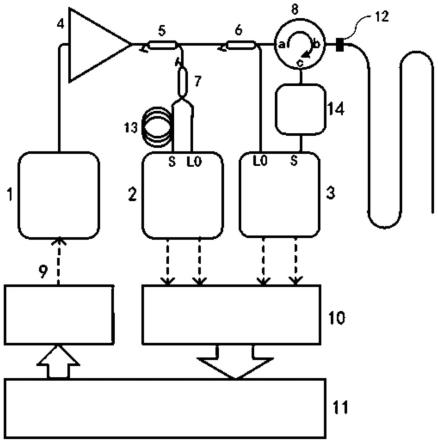
ry
(k)、u
ii
(k)和u
iq
(k);其中,k代表序号;
21.步骤s9,工控机对所述数字信号序列u
rx
(k)、u
ry
(k)、u
ii
(k)和u
iq
(k)进行非线性抑制算法处理后,傅里叶变换得到频谱图;其中非线性抑制算法具体步骤为:
22.s910,基于数字信号序列u
ii
(k)和u
iq
(k),利用欧拉公式,组合成复信号
23.s920,提取的相位信息,相位展开得到进而得到等差数列φ
′i(n)=min{φi(k)}+(n-1)
·
δφ,其中,n=1
…
n, n=(max{φi(k)}-min{φi(k)})/δφ;
24.s930,基于φi(k)和φ
′i(n),通过插值法获得k
′
(n);根据u
rx
(k),通过插值法获得u
′
rx
(n);根据u
ry
(k),通过插值法获得u
′
ry
(n);
25.s940,基于k
′
(n)的值,对u
′
rx
(n)和u
′
ry
(n)进行抽取,获得u
′
rx
(k
′
)和u
′
ry
(k
′
)。
26.步骤s10,基于频谱图,得到待测光纤接口的故障位置。
27.作为本发明的优选方案,一种机载光缆连接故障定位系统的方法,插值法可以采用线性插值算法、三次样条插值算法。
28.作为本发明的优选方案,一种机载光缆连接故障定位系统的方法,步骤s7 中,包
括以下步骤:
29.s710,将背向瑞利散射光分为两个偏振状态垂直的两部分光,分别为rbs
x
、 rbsy;将第一本振光分为两个偏振状态垂直的两部分光,分别本振光
x
、本振光y;
30.s720,rbs
x
和所述本振光
x
干涉,被转换为光电流信号i
rx
(t),再被转换为电压信号u
rx
(t);rbsy和所述本振光y干涉,被转换为光电流信号i
ry
(t),再被转为电压信号u
ry
(t)。
31.作为本发明的优选方案,一种机载光缆连接故障定位系统的方法,步骤s7 中,还包括以下步骤:
32.s701,将信号光分为第一信号光和第二信号光,第二信号光的相位比第一信号光延迟90
°
;将第二本振光分为第三本振光和第四本振光,第三本振光比第四本振光的相位延迟90
°
;
33.s702,第一信号光和第三本振光干涉,被转换为光电流信号i
ii
(t),再被转换为电压信号u
ii
(t);第二信号光和第四本振光干涉,被转换为光电流信号i
iq
(t),再被转换为电压信号u
iq
(t)。
34.作为本发明的优选方案,一种机载光缆连接故障定位系统的方法,步骤s10 中,利用频谱图,得到待测光纤接口的故障位置公式为:其中,l为探测点到故障位置的距离,γ为扫频速度,c为光在光纤里的传播速度,f为频率。
35.综上所述,由于采用了上述技术方案,本发明的有益效果是:
36.本发明将ofdr应用于机载光缆连接故障的定位,利用ofdr高空间分辨率的优势,实现当机载光缆网络中出现相距厘米量级的连接器故障,能够精确定位故障,提高检测和排故效率;通过对分布式反馈激光器的输出频率进行多周期的三角形调谐,达到更高的调谐速度,有效降低激光器相位噪声的影响;同时,利用可调衰减器,对待测光纤的反射光进行衰减再接收,实现防止机载光缆网络中心pc型光纤接口的强菲涅尔反射,导致ofdr失效的目的;最后,利用非线性抑制算法,避免啁啾光的实际频率为非线性变化导致ofdr测量反射展宽,从而使得空间分辨率降低。综上所述,本发明提供机载光缆连接故障定位的方法及系统的实现厘米量级的连接器故障的精确定位,提高排故效率,达到了ofdr检测能力同时降低成本。
附图说明
37.图1是本发明的系统示意图。
38.图2是多三角波型驱动电流示意图。
39.图3是单锯齿波型驱动电流示意图。
40.图4为42m的光纤测试曲线图。
41.图5为42m待测光纤末端的菲涅尔峰结果图。
42.图标:1-分布式反馈激光器;2-正交接收机;3-偏振接收机;4-掺铒光纤放大器;5-第一光纤耦合器;6-第二光纤耦合器;7-第三光纤耦合器;8-三端口光纤环形器;9-数字-模拟转换器;10-模拟-数字转换器;11-工控机;12-待测光纤接口;13-延迟光纤线;14-可调衰减器。
具体实施方式
43.下面结合附图,对本发明作详细的说明。
44.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
45.实施例1
46.如图1所示,一种机载光缆连接故障定位系统,包括分布式反馈激光器1、正交接收机2、偏振接收机3、掺铒光纤放大器4、第一光纤耦合器5、第二光纤耦合器6、第三光纤耦合器7、三端口光纤环形器8、数字-模拟转换器9、模拟-数字转换器10、工控机11、待测光纤接口12、延迟光纤线13以及可调衰减器14;其中,第一光纤耦合器5、第二光纤耦合器6和第三光纤耦合器7均采用保偏2
×
2光纤耦合器;
47.具体的,如图1所示虚线表示为同轴电缆连接,实线表示为光纤连接。一种机载光缆连接故障定位系统还包括待测光纤接口12,工控机11与数字-模拟转换器9连接,数字-模拟转换器9与分布式反馈激光器1的输入端采用同轴电缆进行连接,分布式反馈激光器1的输出端与掺铒光纤放大器4的输入端连接,掺铒光纤放大器4的输出端与第一光纤耦合器5的输入端连接,第一光纤耦合器5的第一输出端与第二光纤耦合器6的输入端连接,第一光纤耦合器5的第二输出端与第三光纤耦合器7的输入端连接;
48.进一步的,第二光纤耦合器6的第一输出端与三端口光纤环形器8的端口a连接,三端口光纤环形器8的端口b与所述待测光纤接口12连接,三端口光纤环形器8的端口c与可调衰减器14的输入端连接,可调衰减器14的输出端与偏振接收机3的端口s连接,第二光纤耦合器6的第二输出端与偏振接收机3 的端口l0连接,偏振接收机3的输出端与模拟-数字转换器10的输入端采用同轴电缆进行连接;
49.进一步的,第三光纤耦合器7的第一输出端与延迟光纤线13的一端连接,延迟光纤线13的另一端与正交接收机2的端口s连接,第三光纤耦合器7的第二输出端与正交接收机2的端口l0连接,正交接收机2的输出端与模拟-数字转换器10的输入端采用同轴电缆进行连接;
50.模拟-数字转换器10输出端与工控机11的输入端连接。
51.其中,三端口光纤环形器8的端口a为三端口光纤环形器8的第一端口,端口b为第二端口,端口c为第三端口;偏振接收机3的端口s为偏振接收机3 的第一输入端,端口l0为第二输入端;正交接收机2的端口s为正交接收机2 的第一输入端,端口l0为第二输入端。
52.本实施例的分布式反馈激光器1选用一款线宽约500khz、无跳模扫频范围约0.25nm(31.25ghz)、电流调频效率约0.003nm/ma(0.375ghz/ma)的半导体激光器,半导体激光器自带的跨阻放大器系数为150ma/v;选用的半导体激光器价格仅为数千人民币,相比于售价几十万人民币的机械式大范围扫频激光源便宜很多,降低了成本。
53.一种机载光缆连接故障定位系统的方法,包括以下步骤:
54.步骤s1,工控机11控制数字-模拟转换器9产生幅度呈三角型周期变化的电压信号u(t);
55.具体的,工控机控制数字-模拟转换器9(dac)在工控机的控制下,产生电压幅度范围为0至0.36v,电压周期为20ms的三角型电压信号u(t),即幅度随时间呈三角型周期变化
的电压信号u(t),电压信号u(t)进入分布式反馈激光器 1。
56.步骤s2,电压信号u(t)经过分布式反馈激光器1,得到频率先正向变化、再反向变化的啁啾光;
57.分布式反馈激光器1(dfb)通过改变驱动电流的大小来调谐输出激光的频率。如图2、图3所示,分布式反馈激光器1的驱动电流为多三角波型变化,相比于常用的单锯齿波型驱动电流,多三角波型变化的驱动电流优势在于频率调谐速度快,可以有效降低激光器相位噪声影响。
58.具体的,电压信号u(t)经过分布式反馈激光器1的跨阻放大器,变为电流范围为0至54ma,周期为20ms的三角形电流信号i(t),即驱动电流i(t),如图2 所示,驱动电流i(t)驱动分布式反馈激光器1(dfb)输出频率先正向变化、再反向变化的啁啾光,即扫频光,其频率先从0升到20.25ghz,再从20.25ghz 回到0,整个周期为20ms,扫频速度γ计算为1012.5ghz/s。为提高空间分辨率,可以扩大dac输出电压,则可以增大扫频光总扫频范围。
59.步骤s3,啁啾光经过掺铒光纤放大器4,得到光功率恒定的啁啾光;
60.具体的,由于分布式反馈激光器1输出啁啾光的光功率和驱动电流i(t)得大小正相关,因此在三角型变化的驱动电流影响下,啁啾光的光功率不恒定。进一步的,将啁啾光的光功率信息输入到掺铒光纤放大器4(edfa)中,经过饱和放大,使其啁啾光的光功率恒定为p0。
61.步骤s4,光功率恒定的啁啾光通过第一光纤耦合器5,分为探测光和参考光;
62.具体的,光功率恒定为p0的啁啾光通过第一光纤耦合器5分为两路光,第一光纤耦合器5优选为保偏2
×
2光纤耦合器,此耦合器的分光比优选为99比1,其中,99%功率的光作为探测光,1%功率的光作为参考光。
63.步骤s5,探测光通过第二光纤耦合器6,分为入射光和第一本振光;参考光通过第三光纤耦合器7,分为信号光和第二本振光;
64.探测光通过第二光纤耦合器6分为两路光,第二光纤耦合器6优选为保偏2
ꢀ×
2光纤耦合器,此耦合器的分光比优选为90比10,其中,90%功率的光作为入射光,10%功率的光作为第一本振光。
65.参考光通过第三光纤耦合器7分为两路光,第三光纤耦合器7优选为保偏2
ꢀ×
2光纤耦合器,此耦合器的分光比优选为50比50,其中,一路50%功率的光作为信号光,另一路50%功率的光作为第二本振光。
66.步骤s6,入射光通过三端口光纤环形器8,进入待测光纤,得到背向瑞利散射光;
67.具体的,入射光从三端口光纤环形器8的端口a输入、端口b输出至待测光纤中,待测光纤选用一根长为42m的单模光纤进行测试,入射光在待测光纤中前向传播,沿光纤轴向方向产生背向瑞利散射光(rbs),背向瑞利散射光(rbs) 从三端口光纤环形器8的端口b输入、端口c输出。
68.步骤s7,背向瑞利散射光经过可调衰减器14进入偏振接收机3,第一本振光直接进入偏振接收机3,得到电压信号u
rx
(t)、u
ry
(t),其中,u为电压,r 代表反射仪,x或y分别代表两个垂直偏振态,t代表采样时间;信号光经过延迟光纤线13进入正交接收机2,第二本振光直接进入正交接收机2,得到电压信号u
ii
(t)、u
iq
(t),其中,下标第一个字母i代表干涉仪,下标第二个字母i或 q分别代表两个正交相位;
69.可调光功率衰减器14用于减小接收到的反射光功率。机载光缆的连接器端面为物理接触(pc)型,当出现故障时会形成菲涅尔反射,反射光功率极强,导致偏振接收机3饱和,ofdr检测能力失效,ofdr检测具有高空间分辨率的能力,实现精确定位机载光缆网络中的相距距离较小的故障点,提高排故效率。因此需要利用可调衰减器去14,当反射光功率强时,进行衰减,当反射功率正常时,不衰减。
70.具体的,背向瑞利散射光(rbs)经过可调光功率衰减器14,从偏振分集接收机3的输入端s进入,被分为两个偏振状态垂直的两部分光,分别为rbs
x
、 rbsy;并且,第一本振光直接从偏振分集接收机3的输入端l0进入后,被分为两个偏振状态垂直的两部分光,分别为本振光
x
、本振光y;
71.进一步的,将rbs
x
和本振光
x
进行干涉,转换为光电流信号i
rx
(t),光电流信号i
rx
(t)通过偏振分集接收机3自带的跨阻放大器转换为电压信号u
rx
(t);将 rbsy和本振光y进行干涉,转换为光电流信号i
ry
(t),光电流信号i
ry
(t)通过偏振分集接收机3自带的跨阻放大器转换为电压信号u
ry
(t)。
72.具体的,信号光经过延迟光纤线13,从正交接收机2的输入端s进入,被分为第一信号光和第二信号光,第二信号光的相位比第一信号光的相位延迟 90
°
;第二本振光直接从正交接收机2的输入端l0进入,被分为第三本振光和第四本振光,第三本振光比第四本振光的相位延迟90
°
;
73.进一步的,将第一信号光和第三本振光进行干涉,转换为光电流信号i
ii
(t),光电流信号i
ii
(t)通过正交接收机2自带的跨阻放大器转换为电压信号u
ii
(t);第二信号光和第四本振光进行干涉,被转换为光电流信号i
iq
(t),光电流信号i
iq
(t) 通过正交接收机2自带的跨阻放大器转换为电压信号u
iq
(t)。
74.步骤s8,工控机11控制模拟-数字转换器10,将电压信号u
rx
(t)、u
ry
(t)、 u
ii
(t)和u
iq
(t),转换为数字信号序列u
rx
(k)、u
ry
(k)、u
ii
(k)和u
iq
(k);其中,k 代表序号;
75.具体的,模拟-数字转换器10为四通道模拟-数字转换器,接收到正交接收机2输出的电压信号u
ii
(t)和u
iq
(t),以及偏振分集接收机3输出的电压信号u
rx
(t)和u
ry
(t),工控机11控制模拟-数字转换器10将四路电压信号转换为离散的数字信号序列u
rx
(k)、u
ry
(k)、u
ii
(k)和u
iq
(k),数字信号序列再传输到工控机11。其中,字母k代表序号,t=k
·
ts,ts代表模拟-数字转换器10的采样时间间隔。
76.步骤s9,工控机11对数字信号序列u
rx
(k)、u
ry
(k)、u
ii
(k)和u
iq
(k)进行数字信号处理,得到频谱图;
77.根据光频域反射技术(ofdr)原理,对u
rx
(k)和u
ry
(k)做傅里叶变换即可实现对光纤连接情况的高空间分辨率检查,光纤反射的位置对应频谱的频率大小,反射强度对应频谱的功率密度。但是,由于分布式反馈激光器1的非线性响应,当驱动电流信号线性变化时,啁啾光的实际频率为非线性变化,会导致 ofdr测量反射展宽,降低空间分辨率,甚至失去测量能力。因此需要进行非线性抑制,具体非线性抑制算法如下:
78.工控机11接收到数字信号序列u
rx
(k)、u
ry
(k)、u
ii
(k)和u
iq
(k),利用数字信号序列u
ii
(k)和u
iq
(k),在数字域中,采用欧拉公式组合成复信号(k),在数字域中,采用欧拉公式组合成复信号
79.提取的相位信息,并做相位2π展开,得到由于非线
性φi(k)为非线性增长,产生等差数列φ
′i(n)=min{φi(k)}+(n-1)
·
δφ,其中,n=1
…
n,n=(max{φi(k)}-min{φi(k)})/δφ,公差δφ为设定的等相位间隔;
80.以φi(k)为自变量,k为应变量,再以φ
′i(n)为新的自变量,通过插值法获得k
′
(n);以k为自变量,u
rx
(k)为应变量,再以n为自变量,通过插值法获得 u
′
rx
(n);以k为自变量,u
ry
(k)为应变量,再以n为自变量,通过插值法获得 u
′
ry
(n);插值法可以采用线性插值算法、三次样条插值算法等。
81.进一步的,根据k
′
(n)的值对u
′
rx
(n)和u
′
ry
(n)进行抽取,获得u
′
rx
(k
′
)和u
′
ry
(k
′
),实现抑制啁啾光的实际频率的非线性变化;
82.进一步的,对u
′
rx
(k
′
)和u
′
ry
(k
′
)进行傅里叶变换,得到fft{u
′
rx
(k
′
)}和 fft{u
′
ry
(k
′
)},再对fft{u
′
rx
(k
′
)}和fft{u
′
ry
(k
′
)}求平均值,消除偏振影响,得到频谱图。
83.步骤s10,基于频谱图,得到待测光纤的故障位置。
84.具体的,利用频谱图,得到待测光纤的故障位置公式为:其中, l为探测点到故障位置的距离,γ为扫频速度,c为光在光纤里的传播速度,f为频率。
85.如图4、图5所示,当扫频总范围为20ghz时,ofdr理论空间分辨率为 5mm,定义测试得到的待测光纤末端反射峰的半高全宽(3db宽度)为实际空间分辨率,经测量实际空间分辨率约为4.8mm,与理论设计值近似,符合要求。
86.进一步的,对频谱图分析可以得到,光纤反射的位置对应频谱的频率大小,光纤反射强度对应频谱的功率密度,实现了ofdr检测能力,达到高空间分辨率的能力,精确定位机载光缆网络中的相距距离较小的故障点,提高排故效率。
87.综上所述,本发明将ofdr应用于机载光缆连接故障的定位,采用多三角波型变化的驱动电流驱动分布式反馈激光器,进行频率调谐输出啁啾光,利用可调衰减器对待测光纤的反射光进行衰减再接收,最后采用非线性抑制算法数据处理后再进行傅里叶变换,降低了激光器相位噪声的影响,防止机载光缆网络中心pc型光纤接口的强菲涅尔反射导致ofdr失效,避免了啁啾光的实际频率为非线性变化使得空间分辨率降低,因此,实现精确定位机载光缆网络中出现相距厘米量级的连接器故障,同时降低成本。
88.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1