一种具有纳米级分辨率的超快成像系统
1.本发明属于超快成像领域,具体涉及一种具有纳米级分辨率的超快成像系统。
背景技术:
2.超快成像主要有两种方式,超快时域拉伸成像主要有两种方式,一种是利用棱镜、光栅等一维衍射器件对脉冲激光进行一维空间衍射,从而对待测物进行线扫描;另一种是采用光栅和虚拟相位阵列结合的方式,对脉冲激光进行二维空间衍射,从而对待测物进行面扫描。虽然该方法在显微成像领域有较好的应用前景,但是无法获得样品的深度信息。目前测量待测物的深度信息通常采用光相干层析(oct)技术,该技术通过将光脉冲集中在一点,通过干涉谱自由光谱范围(fsr)的变化来反映待测物的深度信息,虽然该方法可以获得样品的深度信息,但是光相干层析技术的分辨率在微米以上,难以提供像在芯片,光刻机等检验中需要的纳米级精度。
技术实现要素:
3.本发明提供一种具有纳米级分辨率的超快成像系统,以解决目前成像过程中,待测物各个位置处的深度测量精度较低的问题。
4.根据本发明实施例的第一方面,提供一种具有纳米级分辨率的超快成像系统,包括激光器、参考臂、测量臂和探测器,所述激光器产生的激光信号被分成两路,一路传输给所述参考臂,另一路传输给所述测量臂,所述参考臂根据所述激光信号中光谱成分波长的不同,对各个光谱成分的光程进行对应调节,并将光程调节后由各个光谱成分组成的激光信号传输给该探测器,使得各个光谱成分从所述激光器传输给所述探测器所经历的光程长度不同;所述测量臂将该激光信号转换为具有不同波长的平行光,并入射至待测物上,所述待测物上各个位置在接收到所述平行光后,通过该测量臂将反射光反向传输给该探测器,所述待测物上各个位置处的深度信息被加载至所述反射光的光谱中;所述探测器接收到该激光信号和反射光后,两者发生干涉,生成干涉信号;
5.针对该待测物上接收到平行光的各个位置,分别对各个位置对应的干涉信号进行相位解调,获得各个位置对应的二次项相位,所述二次项相位是因所述参考臂对各个光谱成分的光程进行对应调节而被引入至所述干涉信号中;
6.根据所述二次项相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延,从而获得所述待测物上的绝对深度;
7.针对位于一列的各个位置,求得该列中各个位置处二次项相位的平均值,获得二次项平均相位,并将该列中各个位置的二次项相位与该二次项平均相位做差处理,获得该列中各个位置对应的相位差;根据各个位置对应的相位差,确定各个位置上相对深度;
8.针对每个位置,将该位置上相对深度加上该待测物上的绝对深度,得到该位置上的实际深度。
9.在一种可选的实现方式中,设所述平行光所在的垂直于该待测物的平面为第一平
面,所述待测物上与该第一平面平行的方向为x轴方向,所述待测物上与该x轴垂直的方向为y轴方向;其中具有相同x值,不同y值的各个位置组成一列;
10.所述根据所述二次项相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延包括:在获得各个位置对应的二次项相位后,针对位于一列的各个位置,求得该列中各个位置处二次项相位的平均值,获得二次项平均相位,以避免所述干涉信号的时间干涉谱中交流项的第三项对所述时延的确定造成干扰;
11.根据所述二次项平均相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延。
12.在另一种可选的实现方式中,分别对各个位置对应的干涉信号进行相位解调,获得各个位置对应的二次项相位包括:
13.针对该待测物上接收到平行光的每个位置,先对该位置对应的干涉信号进行傅里叶变换,再对傅里叶变换后的干涉信号进行高通滤波,滤除时间干涉谱中的直流项,最后对高通滤波后的干涉信号进行逆傅里叶变换,从而获得该位置对应的二次项相位。
14.在另一种可选的实现方式中,还包括色散补偿光纤、环形器、第一准直器和分束器,所述激光器的输出端通过该色散补偿光纤与该环形器的第一端的连接,所述第一环形器的第二端通过该第一准直器与该分束器的第一端连接,该分束器的第二端连接该参考臂,第三端连接该测量臂;所述参考臂包括光栅对和反射镜,所述分束器的第二端通过该光栅对连接反射镜,所述测量臂包括第二准直器、衍射光栅和平凸透镜,所述分束器的第三端依次通过该第二准直器、衍射光栅、平凸透镜连接该待测物;所述环形器的第三端连接该探测器;
15.所述色散补偿光纤对所述激光器产生的激光信号在时域上进行拉伸,时域拉伸后的激光信号通过该环形器被传输给该第一准直器,经该第一准直器准直后被传输给所述分束器;所述分束器将时域拉伸后的激光信号分成两路,一路传输给该光栅对,在所述光栅对的空间色散作用下,所述激光信号中具有不同波长的光谱成分的光程发生变化,光程发生变化后的光谱成分被传输给该反射镜,所述反射镜在接收到各个光谱成分后,将各个光谱成分沿着原传输路径,通过该光栅对传输给所述分束器,其中各个光谱成分从该分束器输出到反向传输回分束器所经历的光程长度不同,从而使得各个光谱成分从所述激光器传输给所述探测器所经历的光程长度不同;
16.另一路经该第二准直器准直后,传输给该衍射光栅,所述衍射光栅将该激光信号转换为具有不同衍射路径的衍射光,各个具有不同衍射路径的衍射光通过该平凸透镜后被转换为具有不同波长的平行光,并入射至该待测物上;所述待测物上对应位置在接收到平行光后产生反射光,且该对应位置处的深度信息被编码至所述反射光的光谱中,所述反射光沿着原传输路径,依次通过该平凸透镜、衍射光栅和第二准直器传输给该分束器;
17.所述分束器依次通过该第一准直器、环形器,将反向传输回的反射光以及由各个光谱成分组成的激光信号和传输给该探测器。
18.在另一种可选的实现方式中,所述干涉信号的干涉谱表示为:
19.20.其中,a(x)为干涉谱的包络,β2是色散补偿光纤的二阶色散系数,wc为激光器提供的激光信号的中心角频率,a为与光栅对相关的色散系数,c为空气中的光速,d(x)为不同位置下的相对深度信息,n为空气的折射率,τ为参考臂与测量臂的时延。
21.在另一种可选的实现方式中,根据所述二次项相位的最低相位点对应的中心角频率,按照以下公式确定所述参考臂与测量臂的时延τ:
[0022][0023]
其中a为与光栅对相关的色散系数,β2是色散补偿光纤的二阶色散系数,ω
′c为二次项相位的最低相位点对应的中心角频率;
[0024]
或者根据所述二次项平均相位的最低相位点对应的中心角频率,按照以下公式确定所述参考臂与测量臂的时延τ:
[0025][0026]
其中a为与光栅对相关的色散系数,β2是色散补偿光纤的二阶色散系数,ω
′c为二次项平均相位的最低相位点对应的中心角频率。
[0027]
在另一种可选的实现方式中,根据各个位置对应的相位差,按照以下公式确定各个位置上相对深度:
[0028][0029]
其中,c为空气中的光速,β2是色散补偿光纤的二阶色散系数,为每个位置对应的相位差,n为空气的折射率。
[0030]
在另一种可选的实现方式中,所述激光器为超快激光器,所述激光信号的光谱范围为十几纳米级,脉冲重复频率大于兆赫兹。
[0031]
在另一种可选的实现方式中,所述待测物的扫描表面为粗糙表面。
[0032]
在另一种可选的实现方式中,所述测量臂将该激光信号转换为具有不同波长且位于同一平面的平行光,通过沿着y轴方向移动该待测物,以使该探测器探测到该待测物上各个位置对应的干涉信号,分别对各个位置对应的干涉信号进行相位解调,获得各个位置对应的二次项相位。
[0033]
本发明的有益效果是:
[0034]
1、本发明利用参考臂,对激光信号中各个光谱成分的光程进行对应调节,以使各个光谱成分从激光器传输给探测器所经历的光程长度不同,由此传输回探测器的激光信号和加载有深度信息的反射光发生干涉,生成的干涉信号中会被引入二次项相位,使得本发明基于该二次项相位进行深度测量;本发明在进行深度测量时,首先根据二次项相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延,从而获得所述待测物上的绝对深度,以在微米量级上进行深度判断;然后针对位于一列的各个位置,求得该列中各个位置处二次项相位的平均值,获得二次项平均相位,并将该列中各个位置的二次项相位与该二次项平均相位做差处理,获得该列中各个位置对应的相位差;根据各个位置对应的相
位差,确定各个位置上相对深度,通过相位差的变化来反映深度的变化,使得深度的测量精度可以轻而易举达到纳米量级;而待测物上各个位置的实际深度是由绝对深度和相对深度共同决定的,因此本发明深度的测量精度得到了提高,可达纳米量级;另外,本发明将激光信号转换为具有不同波长的平行光入射至待测物上各个位置处,即不同位置处接收到的入射光的波长不同,由此可以根据反射光的波长不同来确定该反射光是从待测物上哪个位置处反射回来的,实现待测物表面的二维高分辨率位置扫描,各个位置处的深度信息都会被加载至反射光的光谱中且深度的测量精度可达纳米量级,由此实现了待测物的三维高分辨率高速扫描;
[0035]
2、本发明对二次项相位的解调方法进行了改进,在对各个位置对应的干涉光信号进行相位处理时,针对该待测物上接收到平行光的每个位置,首先对该位置对应的干涉信号进行傅里叶变换,再对傅里叶变换后的干涉信号进行高通滤波,滤除时间干涉谱中的直流项,最后对高通滤波后的干涉信号进行逆傅里叶变换,从而获得该位置对应的二次项相位,由此可以避免时间干涉谱的直流项对解调出的二次项相位造成干扰,从而避免提取出的二次项相位存在较大的误差;
[0036]
3、本发明在获得各个位置对应的二次项相位后,可以首先针对位于一列的各个位置,求得该列中各个位置处二次项相位的平均值,获得二次项平均相位;然后根据所述二次项平均相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延,由此可以避免干涉信号的时间干涉谱中交流项的第三项对时延的确定造成干扰;
[0037]
4、本发明利用色散补偿光纤,基于时域拉伸技术,将光谱与光脉冲对应,波长与时间相映射,可以保证单帧瞬时光谱的获取,提高成像系统的时间分辨率,并且使本发明成像系统可以基于单脉冲实现三维扫描;
[0038]
5、本发明将光谱信息由探测器来探测,而非光谱仪,可以避免因光谱仪采样率较低而限制系统帧率,由探测器进行光谱信息采集,可以将采样率提高至兆赫兹;另外,由于本发明激光信号的光谱宽度为几十纳米,即光谱对应的脉冲与脉冲之间的间隔为纳米量级,因此系统具有每秒千万张图片的刷新帧率,从而可以保证对快速变化的待测物表面进行高速的三维扫描;
[0039]
6、本发明通过衍射光栅,将光谱中波长与空间位置相对应,可以实现多波长并行的干涉,提高了待测物表面的空间分辨率。
附图说明
[0040]
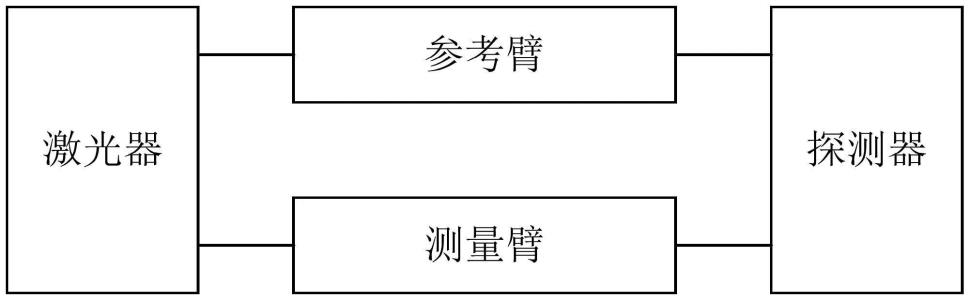
图1是本发明具有纳米级分辨率的超快成像系统的一个实施例结构示意图;
[0041]
图2是本发明具有纳米级分辨率的超快成像系统的另一实施例结构示意图。
具体实施方式
[0042]
为了使本技术领域的人员更好地理解本发明实施例中的技术方案,并使本发明实施例的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明实施例中技术方案作进一步详细的说明。
[0043]
在本发明的描述中,除非另有规定和限定,需要说明的是,术语“连接”应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,也可
以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
[0044]
参见图1,为本发明具有纳米级分辨率的超快成像系统的一个实施例结构示意图。该具有纳米级分辨率的超快成像系统可以包括激光器、参考臂、测量臂和探测器,所述激光器产生的激光信号被分成两路,一路传输给所述参考臂,另一路传输给所述测量臂,所述参考臂根据所述激光信号中光谱成分波长的不同,对各个光谱成分的光程进行对应调节,并将光程调节后由各个光谱成分组成的激光信号传输给该探测器,使得各个光谱成分从所述激光器传输给所述探测器所经历的光程长度不同;所述测量臂将该激光信号转换为具有不同波长的平行光,并入射至待测物上,所述待测物上各个位置在接收到所述平行光后,通过该测量臂将反射光反向传输给该探测器,所述待测物上各个位置处的深度信息被加载至所述反射光的光谱中;所述探测器接收到该激光信号和反射光后,两者发生干涉,生成干涉信号。
[0045]
针对该待测物上接收到平行光的各个位置,分别对各个位置对应的干涉信号进行相位解调,获得各个位置对应的二次项相位,所述二次项相位是因所述参考臂对各个光谱成分的光程进行对应调节而被引入至所述干涉信号中;根据所述二次项相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延,从而获得所述待测物上的绝对深度;针对位于一列的各个位置,求得该列中各个位置处二次项相位的平均值,获得二次项平均相位,并将该列中各个位置的二次项相位与该二次项平均相位做差处理,获得该列中各个位置对应的相位差;根据各个位置对应的相位差,确定各个位置上相对深度;针对每个位置,将该位置上相对深度加上该待测物上的绝对深度,得到该位置上的实际深度。
[0046]
本实施例中,当平行光入射至的待测物的表面平滑,为理想的反射镜时,从该待测物上各个位置反射回的反射光与该激光信号发生干涉后,得到的时间干涉谱均相同。但是当平行光入射至的待测物的扫描表面粗糙,不均匀时,由于待测物表面不同位置处的深度可能有所不同,因此从该待测物上各个位置反射回的反射光的光程长度也可能有所不同,从而导致该待测物上各个位置反射回的反射光与该激光信号发生干涉后,得到的时间干涉谱的相位也会有所不同。其中,该平行光可以垂直入射至待测物表面的各个位置处。
[0047]
待测物上各个位置反射回的反射光与激光信号发生干涉,生成与各个位置对应的干涉信号,探测器在探测到与各个位置对应的干涉信号后,可以首先将探测到的各个干涉信号存储至计算机中,然后由计算机对这些干涉信号进行处理,从而获得待测物上各个位置的实际深度。具体地,计算机可以首先分别对各个位置对应的干涉光信号进行相位处理,获得各个位置对应的二次项相位。经研究发现,干涉信号中时间干涉谱的直流项会对解调出的二次项相位造成干扰,从而导致提取出的二次项相位存在较大的误差。目前常用的相位解调方法为利用希尔伯特变化进行解调,但是这种相位解调方法并不能滤除时间干涉谱中的直流项。为此,本发明对二次项相位的解调方法进行了改进,计算机在对各个位置对应的干涉光信号进行相位处理时,针对该待测物上接收到平行光的每个位置,首先对该位置对应的干涉信号进行傅里叶变换,再对傅里叶变换后的干涉信号进行高通滤波,滤除时间干涉谱中的直流项,最后对高通滤波后的干涉信号进行逆傅里叶变换,从而获得该位置对应的二次项相位。
[0048]
在获得各个位置对应的二次项相位后,根据二次项相位的最低相位点对应的中心
角频率以及参考臂与测量臂之间的时延关系,确定参考臂与测量臂的时延,即参考臂与测量臂之间的光程差,根据该光程差就可以获得待测物上的绝对深度。其中,当参考臂与测量臂之间的光程差为零时,二次项相位的最低相位点对应的中心角频率为激光器输出的激光信号的中心角频率。另外,经研究发现,干涉信号的时间干涉谱中交流项的第三项会对参考臂与测量臂之间时延的确定造成干扰。为此本发明在获得各个位置对应的二次项相位后,可以首先针对位于一列的各个位置,求得该列中各个位置处二次项相位的平均值,获得二次项平均相位,以避免所述干涉信号的时间干涉谱中交流项的第三项对所述时延的确定造成干扰;然后根据所述二次项平均相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延。
[0049]
为了获得待测物上各个位置对应的干涉信号,所述测量臂可以将该激光信号转换为具有不同波长且位于同一平面的平行光,设所述平行光所在的垂直于该待测物的平面为第一平面,所述待测物上与该第一平面平行的方向为x轴方向,所述待测物上与该x轴垂直的方向为y轴方向;通过沿着y轴方向移动该待测物,以使该探测器探测到该待测物上各个位置对应的干涉信号,分别对各个位置对应的干涉信号进行相位解调,获得各个位置对应的二次项相位,其中具有相同x值,不同y值的各个位置组成一列。本实施例测量臂将激光信号转换为具有不同波长且位移同一平面的平行光,可以对待测物进行x轴方向的线扫描,并且不同波长的平行光入射至待测物上不同位置处,可以在x-y轴平面上实现了空间位置与波长对应,从而实现空间位置的识别扫描。另外,本实施例可以通过将待测物固定在步进电机上,由步进电机带动待测物沿着y轴方向移动,以对待测物进行x轴和y轴两个维度的扫描。
[0050]
由于二次项相位的最低相位点对应的中心角频率会随着深度的变化而发生漂移,因此本发明根据二次项相位的最低相位点对应的中心角频率,可以确定出参考臂与测量臂的时延,进而获得待测物上的绝对深度,绝对深度是在微米量级上进行深度判断。在绝对深度的基础上,本发明还引入了相对深度的概念,以在纳米量级上进行深度判断。具体地,计算机针对位于一列的各个位置,可以首先求得该列中各个位置处二次项相位的平均值,获得二次项平均相位,并将该列中各个位置的二次项相位与该二次项平均相位做差处理,获得该列中各个位置对应的相位差;然后根据各个位置对应的相位差,确定各个位置上相对深度。本发明是通过相位差的变化来反映深度的变化,而深度的测量精度是由相位解析精度来确定的(例如相位解析可测量到的最小相位变化可达到0.01rad,此时深度的测量精度可由0.01/2π*λc,其中λc为超快脉冲的中心波长计算),可见,相位差可以更加精确地反映出深度的变化情况,如此使得深度的测量精度可以轻而易举达到纳米量级。其中,相对深度可以为正值,也可以负值。
[0051]
由上述实施例可见,本发明利用参考臂,对激光信号中各个光谱成分的光程进行对应调节,以使各个光谱成分从激光器传输给探测器所经历的光程长度不同,由此传输回探测器的激光信号和加载有深度信息的反射光发生干涉,生成的干涉信号中会被引入二次项相位,使得本发明基于该二次项相位进行深度测量;本发明在进行深度测量时,首先根据二次项相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延,从而获得所述待测物上的绝对深度,以在微米量级上进行深度判断;然后针对位于一列的各个位置,求得该列中各个位置处二次项相位的平均值,获得二次项平均相位,并将该列中各个位置
的二次项相位与该二次项平均相位做差处理,获得该列中各个位置对应的相位差;根据各个位置对应的相位差,确定各个位置上相对深度,通过相位差的变化来反映深度的变化,使得深度的测量精度可以轻而易举达到纳米量级;而待测物上各个位置的实际深度是由绝对深度和相对深度共同决定的,因此本发明深度的测量精度得到了提高,可达纳米量级;另外,本发明将激光信号转换为具有不同波长的平行光入射至待测物上各个位置处,即不同位置处接收到的入射光的波长不同,由此可以根据反射光的波长不同来确定该反射光是从待测物上哪个位置处反射回来的,实现待测物表面的二维高分辨率位置扫描,各个位置处的深度信息都会被加载至反射光的光谱中且深度的测量精度可达纳米量级,由此实现了待测物的三维高分辨率高速扫描。
[0052]
参见图2,为本发明具有纳米级分辨率的超快成像系统的另一实施例结构示意图。图2与图1所示实施例的区别在于,还包括色散补偿光纤、环形器、第一准直器和分束器,所述激光器的输出端通过该色散补偿光纤与该环形器的第一端的连接,所述第一环形器的第二端通过该第一准直器与该分束器的第一端连接,该分束器的第二端连接该参考臂,第三端连接该测量臂;所述参考臂包括光栅对和反射镜,所述分束器的第二端通过该光栅对连接反射镜,所述测量臂包括第二准直器、衍射光栅和平凸透镜,所述分束器的第三端依次通过该第二准直器、衍射光栅、平凸透镜连接该待测物;所述环形器的第三端连接该探测器。
[0053]
所述色散补偿光纤对所述激光器产生的激光信号在时域上进行拉伸,时域拉伸后的激光信号通过该环形器被传输给该第一准直器,经该第一准直器准直后被传输给所述分束器;所述分束器将时域拉伸后的激光信号分成两路,一路传输给该光栅对,在所述光栅对的空间色散作用下,所述激光信号中具有不同波长的光谱成分的光程发生变化,光程发生变化后的光谱成分被传输给该反射镜,所述反射镜在接收到各个光谱成分后,将各个光谱成分沿着原传输路径,通过该光栅对传输给所述分束器,其中各个光谱成分从该分束器输出到反向传输回分束器所经历的光程长度不同,从而使得各个光谱成分从所述激光器传输给所述探测器所经历的光程长度不同;另一路经该第二准直器准直后,传输给该衍射光栅,所述衍射光栅将该激光信号转换为具有不同衍射路径的衍射光,各个具有不同衍射路径的衍射光通过该平凸透镜后被转换为具有不同波长的平行光,并入射至该待测物上;所述待测物上对应位置在接收到平行光后产生反射光,且该对应位置处的深度信息被编码至所述反射光的光谱中,所述反射光沿着原传输路径,依次通过该平凸透镜、衍射光栅和第二准直器传输给该分束器;所述分束器依次通过该第一准直器、环形器,将反向传输回的反射光以及由各个光谱成分组成的激光信号传输给该探测器。
[0054]
本实施例中,激光器可以为超快激光器,其提供的激光信号可以是光谱宽度为几十纳米,脉冲重复频率大于兆赫兹的超快脉冲激光。由于不同波长的光谱成分在色散补偿光纤中的折射率不同,因此激光信号在通过色散补偿光纤后,会在时域上被拉伸,从而使得光谱与光脉冲形状相对应。本发明基于时域拉伸技术,将光谱与光脉冲对应,波长与时间相映射,可以保证单帧瞬时光谱的获取,提高成像系统的时间分辨率,并且使本发明成像系统可以基于单脉冲实现三维扫描。本发明将光谱信息由探测器(可以为高速光电探测器)来探测,而非光谱仪,可以避免因光谱仪采样率较低而限制系统帧率,由探测器进行光谱信息采集,可以将采样率提高至兆赫兹。另外,由于本发明激光信号的光谱宽度为几十纳米,即光谱对应的脉冲与脉冲之间的间隔为纳米量级,因此系统具有每秒千万张图片的刷新帧率,
从而可以保证对快速变化的待测物进行高速的三维扫描。本发明通过衍射光栅,将光谱中波长与空间位置相对应,可以实现多波长并行的干涉,提高了待测物表面的空间分辨率。
[0055]
探测器在探测到的干涉信号转换为干涉电信号后,由示波器进行模数转换、记录和采集。由于空间位置、波长和时间之间的相互对应关系,在探测器处形成了时间干涉谱。采集到的干涉信号经计算机处理后可获得待测物的三维信息随时间的变化过程。
[0056]
本实施例中,探测器探测到的干涉信号的干涉谱可以表示为:
[0057][0058]
其中,a(x)为干涉谱的包络,β2是色散补偿光纤的二阶色散系数,wc为激光器提供的激光信号的中心角频率,a为与光栅对相关的色散系数,c为空气中的光速,d(x)为不同位置下的相对深度信息,n为空气的折射率,τ为参考臂与测量臂的时延。
[0059]
根据所述二次项相位的最低相位点对应的中心角频率,可以按照以下公式确定所述参考臂与测量臂的时延τ:
[0060][0061]
其中a为与光栅对相关的色散系数,β2是色散补偿光纤的二阶色散系数,ω
′c为二次项相位的最低相位点对应的中心角频率;
[0062]
或者根据所述二次项平均相位的最低相位点对应的中心角频率,可以按照以下公式确定所述参考臂与测量臂的时延τ:
[0063][0064]
其中a为与光栅对相关的色散系数,β2是色散补偿光纤的二阶色散系数,ω
′c为二次项平均相位的最低相位点对应的中心角频率。
[0065]
根据各个位置对应的相位差,可以按照以下公式确定各个位置上相对深度:
[0066]
其中,c为空气中的光速,β2是色散补偿光纤的二阶色散系数,为每个位置对应的相位差,n为空气的折射率。
[0067]
本实施例中,该成像系统的视场大小主要由空间衍射器件(例如衍射光栅)的色散能力,激光信号的光谱带宽共同决定;波长分辨能力主要有以下几个因素决定:一是空间衍射器件的色散能力,二是色散傅里叶变换(dft)的光谱分辨能力,三是探测器、高速示波器等数字器件的带宽决定的光谱分辨能力,系统最终的光谱分辨能力由以上三个参数中最大的决定;成像帧率由激光信号的脉冲频率决定,通常超快激光的脉冲频率大于兆赫兹;图像的像素点主要由激光信号的光谱宽度,色散补偿光纤的色散系数和示波器的采样率共同决定。深度方向的空间分辨率主要与相位分辨率相关,并与系统的噪声水平,探测系统的位数,干涉的对比度等相关。
[0068]
在一个例子中,激光器可以为中心波长为1556nm,光谱带宽为50nm,重复频率约为20mhz的超快脉冲激光器,其提供的激光信号经过色散系数为1.2ns/nm的色散补偿光纤进行时域拉伸后传输至环形器的第一端,环形器的第二端将时域拉伸后的激光信号传输给第一准直器,经第一准直器转换为空间光后,经50:50的分束器分成两路。其中一路在光栅对的空间色散作用下,激光信号中各个不同波长的光谱成分的光程长度发生不同程度的改变,并将光程改变后的激光信号传输回分束器;另一路经第二准直器调整光路后,由一维空间衍射器件(衍射光栅)进行空间色散,从而形成位于同一平面且波长不同的平行光,该平行光垂直入射到待测物上的各个位置处。待测物各个位置处的深度信息被加载到反射光的相位中,反射光沿原路径传输回分束器。在分束器处激光信号与反射光相遇,合束通过第一准直器传输给环形器,由环形器的第三端输出光电探测器(带宽20ghz)的输入端,经过光电探测器进行光强-电压的转换,从而产生干涉光信号。光电探测器的输出端接入高速示波器进行数据采集,采样率为50gsa/s,采样时间应大于经过色散光纤拉伸后的脉冲时间,采集的脉冲个数取决于需要扫描的时间需求并且受限于高数示波器的存储容量。在采集到多组脉冲数据后将其由计算机进行图像恢复。待测物沿x轴的空间位置由波长、时间和空间位置对应关系确定。沿x轴的深度信息可以通过解调干涉谱的相位,通过时间干涉谱相位与两干涉臂相对时延的对应关系获得绝对深度信息,再由时间干涉谱相位变化量与深度的关系来获得不同位置的相对深度信息。
[0069]
由上述实施例可见,本发明利用参考臂,对激光信号中各个光谱成分的光程进行对应调节,以使各个光谱成分从激光器传输给探测器所经历的光程长度不同,由此传输回探测器的激光信号和加载有深度信息的反射光发生干涉,生成的干涉信号中会被引入二次项相位,使得本发明基于该二次项相位进行深度测量;本发明在进行深度测量时,首先根据二次项相位的最低相位点对应的中心角频率,确定所述参考臂与测量臂的时延,从而获得所述待测物上的绝对深度,以在微米量级上进行深度判断;然后针对位于一列的各个位置,求得该列中各个位置处二次项相位的平均值,获得二次项平均相位,并将该列中各个位置的二次项相位与该二次项平均相位做差处理,获得该列中各个位置对应的相位差;根据各个位置对应的相位差,确定各个位置上相对深度,通过相位差的变化来反映深度的变化,使得深度的测量精度可以轻而易举达到纳米量级;而待测物上各个位置的实际深度是由绝对深度和相对深度共同决定的,因此本发明深度的测量精度得到了提高,可达纳米量级;另外,本发明将激光信号转换为具有不同波长的平行光入射至待测物上各个位置处,即不同位置处接收到的入射光的波长不同,由此可以根据反射光的波长不同来确定该反射光是从待测物上哪个位置处反射回来的,实现待测物表面的二维高分辨率位置扫描,各个位置处的深度信息都会被加载至反射光的光谱中且深度的测量精度可达纳米量级,由此实现了待测物的三维高分辨率高速扫描。
[0070]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
[0071]
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并
且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来管制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1