一种同步电机与驱动器接线匹配自动识别方法、系统与流程
1.本技术涉及双驱系统技术领域,尤其涉及一种同步电机与驱动器接线匹配自动识别方法、系统。
背景技术:
2.双驱系统是指驱动器控制两台同步电机,两台同步电机拖动同一个负载运行。其中,驱动器可以是两台独立驱动器,也可以是一台驱动器包含两套驱动单元。驱动器或驱动单元通过力矩分配算法,分配两台同步电机的输出力矩、拖动负载。其中,两台同步电机与驱动器之间接线包含功率线缆:u、v、w和编码器反馈线缆。在实际应用时,电机与驱动器之间的接线必须正确匹配,即电机的功率线缆与编码器的反馈线缆必须接至对应驱动器或驱动单元的功率端口与编码器接口,同时必须保证功率线缆相序与编码器接线方向一致,驱动器才可正常运行,否则会报故障甚至损坏设备。
3.目前,两个电机的线缆经电气柜连接到驱动器后容易混乱,通常的做法是通过人工手动查线来确认,但具体实施过程所需时间较长且麻烦,甚至需要在现场重新拆装电气柜进行接线,增加安全隐患。
技术实现要素:
4.为了提高电机与驱动器之间接线匹配的识别效率,降低由于接线错误所造成的安全隐患,本技术提供了一种同步电机与驱动器接线匹配自动识别方法、系统。
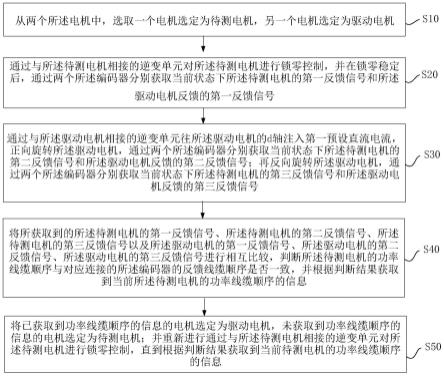
5.第一方面,本技术提供的一种同步电机与驱动器接线匹配自动识别方法,采用如下的技术方案:一种同步电机与驱动器接线匹配自动识别方法,应用于双驱系统,所述双驱系统包括:两个电机,每个所述电机均连接有一个逆变单元和一个编码器,包括以下步骤:从两个所述电机中,选取一个电机选定为待测电机,另一个电机选定为驱动电机;通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,并在锁零稳定后,通过两个所述编码器分别获取当前状态下所述待测电机的第一反馈信号和所述驱动电机反馈的第一反馈信号;通过与所述驱动电机相接的逆变单元往所述驱动电机的d轴注入第一预设直流电流,正向旋转所述驱动电机,通过两个所述编码器分别获取当前状态下所述待测电机的第二反馈信号和所述驱动电机反馈的第二反馈信号;再反向旋转所述驱动电机,通过两个所述编码器分别获取当前状态下所述待测电机的第三反馈信号和所述驱动电机反馈的第三反馈信号;将所获取到的所述待测电机的第一反馈信号、所述待测电机的第二反馈信号、所述待测电机的第三反馈信号以及所述驱动电机的第一反馈信号、所述驱动电机的第二反馈信号、所述驱动电机的第三反馈信号进行相互比较,判断所述待测电机的功率线缆顺序与对应连接的所述编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前所述待测电
机的功率线缆顺序的信息。
6.通过采用上述技术方案,通过从两个电机中,选取一个电机选定为待测电机,另一个电机选定为驱动电机;对待测电机进行锁零控制,并在锁零稳定后,通过两个编码器分别获取当前状态下待测电机的第一反馈信号和驱动电机反馈的第一反馈信号;通过往驱动电机的d轴注入第一预设直流电流,正向旋转驱动电机,通过两个编码器分别获取当前状态下待测电机的第二反馈信号和驱动电机反馈的第二反馈信号;再反向旋转驱动电机,通过两个编码器分别获取当前状态下待测电机的第三反馈信号和驱动电机反馈的第三反馈信号;再将所获取到的待测电机的第一反馈信号、第二反馈信号、第三反馈信号以及所述驱动电机的第一反馈信号、第二反馈信号、第三反馈信号进行相互比较,判断待测电机的功率线缆顺序与对应连接的编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前待测电机的功率线缆顺序的信息,能够实现快速判断出待测电机与驱动器接线是否匹配,提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患。
7.可选的,在所述根据判断结果得到当前待测电机的功率线缆顺序的信息的步骤之后,还包括如下步骤:将已获取到功率线缆顺序的信息的电机选定为驱动电机,未获取到功率线缆顺序的信息的电机选定为待测电机;并重新进行通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,直到根据判断结果获取到当前待测电机的功率线缆顺序的信息。
8.通过采用上述技术方案,将已获取到功率线缆顺序的信息的电机选定为驱动电机,未获取到功率线缆顺序的信息的电机选定为待测电机;并重新进行通过与待测电机相接的逆变单元对待测电机进行锁零控制,可以实现判断同步电机中的每个电机与驱动器接线是否匹配,提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患。
9.可选的,在所述通过与所述驱动电机相接的逆变单元往所述驱动电机的d轴注入第一预设直流电流的步骤中,还包括以下步骤:所述逆变单元往所述驱动电机的d轴注入所述预设直流电流,所述驱动电机依据所述第一预设直流电流的方向进行正转;所述驱动电机正转一定预设角度后,通过两个所述编码器分别获取当前状态下所述待测电机的所述第二反馈信号和所述驱动电机反馈的所述第二反馈信号;所述逆变单元往所述驱动电机的d轴注入所述第一预设直流电流,所述驱动电机依据所述第一预设直流电流的方向进行反转;所述驱动电机反转一定预设角度后,通过两个所述编码器分别获取当前状态下所述待测电机的所述第三反馈信号和所述驱动电机反馈的所述第三反馈信号。
10.通过采用上述技术方案,通过逆变单元往驱动电机的d轴注入第一预设直流电流,驱动电机依据第一预设直流电流进行正转和反转,可以通过两个编码器获取到测试电机和驱动电机的第二反馈信号、第三反馈信号。
11.可选的,在所述将所获取到的所述待测电机的第一反馈信号、所述待测电机的第二反馈信号、所述待测电机的第三反馈信号以及所述驱动电机的第一反馈信号、所述驱动电机的第二反馈信号、所述驱动电机的第三反馈信号进行相互比较,判断所述待测电机的功率线缆顺序与对应连接的所述编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前所述待测电机的功率线缆顺序的信息的步骤中,还包括以下步骤:
判断所述待测电机的第一反馈信号、所述待测电机的第二反馈信号和所述待测电机的第三反馈信号是否都小于设定阈值,以及判断所述驱动电机的第二反馈信号是否同时大于所述驱动电机的第一反馈信号、所述驱动电机的第三反馈信号;若判断任一者为否,则反馈出所述待测电机的功率线缆顺序与所述编码器的反馈线缆顺序不一致的信息;若判断两者都为是,则反馈出所述待测电机的功率线缆顺序与所述编码器的反馈线缆顺序一致的信息。
12.通过采用上述技术方案,通过判断待测电机的第一反馈信号、第二反馈信号和第三反馈信号是否都小于设定阈值,以及判断驱动电机的第二反馈信号是否同时大于驱动电机的第一反馈信号、第三反馈信号,可以实现判断待测电机的功率线缆顺序与编码器的反馈线缆顺序是否一致的信息。
13.可选的,在所述通过与所述驱动电机相接的逆变单元往所述驱动电机的d轴注入第一预设直流电流的步骤中,还包括以下步骤:判断驱动电机中是否连接有抱闸装置,若驱动电机中连接有抱闸装置,则所述逆变单元对所述驱动电机的所述抱闸装置输出松闸电压;所述逆变单元往所述驱动电机的d轴注入所述第一预设直流电流。
14.通过采用上述技术方案,可针对具有抱闸装置的驱动电机,需要逆变单元先对抱闸装置输出松闸电压,以实现逆变单元往驱动电机的d轴注入第一预设直流电流后,驱动电机能够转动。
15.可选的,在所述通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制的步骤中,还包括以下步骤:判断待测电机中是否连接有抱闸装置,若待测电机中连接有抱闸装置,则所述逆变单元不对所述待测电机的所述抱闸装置输出松闸电压,实现对所述待测电机进行锁零控制。
16.通过采用上述技术方案,可针对具有抱闸装置的待测电机,可以不对抱闸装置输出松闸电压,以便于对待测电机进行锁零控制。
17.可选的,在所述通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制的步骤中,还包括以下步骤:判断待测电机中是否连接有抱闸装置,若待测电机中没有连接抱闸装置,则所述逆变单元对所述待测电机的d轴注入第二预设直流电流;所述第二预设直流电流将所述测试电机拖动至所述第二预设直流电流方向进行锁零控制。
18.通过采用上述技术方案,可针对待测电机中没有连接抱闸装置的操作,通过逆变单元对待测电机的d轴注入第二预设直流电流,将测试电机拖动至第二预设直流电流方向进行锁零控制。
19.可选的,所述第二预设直流电流大于所述第一预设直流电流。
20.通过采用上述技术方案,将第二预设直流电流大于第一预设直流电流,可以确保驱动电机不会拖动待测电机进行转动,以影响待测电机的锁零控制,导致信号反馈不准确。
21.第二方面,本技术提供的一种同步电机与驱动器接线匹配自动识别系统,采用如
下的技术方案:一种同步电机与驱动器接线匹配自动识别系统,包括双驱系统,所述双驱系统包括:两个电机,每个所述电机均连接有一个逆变单元和一个编码器,所述逆变单元和编码器均与控制指令单元相接,所述控制指令单元包括:待测电机选定模块,用于从两个所述电机中,选取一个电机选定为待测电机,另一个电机选定为驱动电机;锁零控制模块,所述锁零控制模块与所述待测电机选定模块相连接,用于通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,并在锁零稳定后,通过两个所述编码器分别获取当前状态下所述待测电机的第一反馈信号和所述驱动电机反馈的第一反馈信号;预设直流电流注入模块,所述预设直流电流注入模块与所述锁零控制模块相连接,用于通过与所述驱动电机相接的逆变单元往所述驱动电机的d轴注入预设直流电流,正向旋转所述驱动电机,通过两个所述编码器分别获取当前状态下所述待测电机的第二反馈信号和所述驱动电机反馈的第二反馈信号;再反向旋转所述驱动电机,通过两个所述编码器分别获取当前状态下所述待测电机的第三反馈信号和所述驱动电机反馈的第三反馈信号;判断及信息获取模块,所述判断及信息获取模块与所述预设直流电流注入模块相连接,用于将所获取到的所述待测电机的第一反馈信号、所述待测电机的第二反馈信号、所述待测电机的第三反馈信号以及所述驱动电机的第一反馈信号、所述驱动电机的第二反馈信号、所述驱动电机的第三反馈信号进行相互比较,判断所述待测电机的功率线缆顺序与对应连接的所述编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前所述待测电机的功率线缆顺序的信息。
22.通过采用上述技术方案,通过待测电机选定模块,从两个电机中选取一个电机选定为待测电机,另一个电机选定为驱动电机;通过锁零控制模块,对待测电机进行锁零控制,并在锁零稳定后,通过两个编码器分别获取当前状态下待测电机的第一反馈信号和驱动电机反馈的第一反馈信号;通过预设直流电流注入模块,往驱动电机的d轴注入第一预设直流电流,正向旋转驱动电机,通过两个编码器分别获取当前状态下待测电机的第二反馈信号和驱动电机反馈的第二反馈信号;再反向旋转驱动电机,通过两个编码器分别获取当前状态下待测电机的第三反馈信号和驱动电机反馈的第三反馈信号;再通过判断及信息获取模块,将所获取到的待测电机的第一反馈信号、第二反馈信号、第三反馈信号以及所述驱动电机的第一反馈信号、第二反馈信号、第三反馈信号进行相互比较,判断待测电机的功率线缆顺序与对应连接的编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前待测电机的功率线缆顺序的信息,能够实现快速判断出待测电机与驱动器接线是否匹配,大大提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患。
23.可选的,同步电机与驱动器接线匹配自动识别系统还包括:待测电机转换模块,所述待测电机转换模块与所述判断及信息获取模块相连接,用于将已获取到功率线缆顺序的信息的电机选定为驱动电机,未获取到功率线缆顺序的信息的电机选定为待测电机;并重新进行通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,直到根据判断结果获取到当前待测电机的功率线缆顺序的信息。
24.通过采用上述技术方案,通过待测电机转换模块,将已获取到功率线缆顺序的信息的电机选定为驱动电机,未获取到功率线缆顺序的信息的电机选定为待测电机;并重新进行通过与待测电机相接的逆变单元对待测电机进行锁零控制,可以实现判断同步电机中的每个电机与驱动器接线是否匹配,大大提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患患。
25.综上所述,本技术包括以下至少一种有益技术效果:1.通过从两个电机中,选取一个电机选定为待测电机,另一个电机选定为驱动电机;对待测电机进行锁零控制,并在锁零稳定后,通过两个编码器分别获取当前状态下待测电机的第一反馈信号和驱动电机反馈的第一反馈信号;通过往驱动电机的d轴注入第一预设直流电流,正向旋转驱动电机,通过两个编码器分别获取当前状态下待测电机的第二反馈信号和驱动电机反馈的第二反馈信号;再反向旋转驱动电机,通过两个编码器分别获取当前状态下待测电机的第三反馈信号和驱动电机反馈的第三反馈信号;再将所获取到的待测电机的第一反馈信号、第二反馈信号、第三反馈信号以及所述驱动电机的第一反馈信号、第二反馈信号、第三反馈信号进行相互比较,判断待测电机的功率线缆顺序与对应连接的编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前待测电机的功率线缆顺序的信息,能够实现快速判断出待测电机与驱动器接线是否匹配,大大提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患。
26.2.通过将已获取到功率线缆顺序的信息的电机选定为驱动电机,未获取到功率线缆顺序的信息的电机选定为待测电机;并重新进行通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,直到根据判断结果获取到当前待测电机的功率线缆顺序的信息,可以实现判断同步电机中的每个电机与驱动器接线是否匹配,大大提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患。
附图说明
27.图1是本技术中同步电机与驱动器接线匹配自动识别方法的流程示意图;图2为图1中所示的s20步骤的一种实现流程示意图;图3为图1中所示的s30步骤的一种实现流程示意图;图4为图1中所示的s30步骤的另一种实现流程示意图;图5为图1中所示的s40步骤的一种实现流程示意图;图6是本技术中同步电机与驱动器接线匹配自动识别方法的举例流程示意图;图7是本技术中同步电机与驱动器接线匹配自动识别系统的模块示意图。
28.附图标记说明:10、待测电机选定模块;20、锁零控制模块;30、预设直流电流注入模块;40、判断及信息获取模块;50、待测电机转换模块。
具体实施方式
29.以下结合附图对本技术作进一步详细说明。
30.本技术实施例,为了提高电机与驱动器之间接线匹配的识别效率,以降低由于接线错误所造成的安全隐患,具体公开了一种同步电机与驱动器接线匹配自动识别方法、系
统。参照图1,为同步电机与驱动器接线匹配自动识别方法的步骤流程图,其中,该同步电机与驱动器接线匹配自动识别方法应用于双驱系统,所述双驱系统包括:两个电机,每个所述电机均连接有一个逆变单元和一个编码器,该方法包括:s10:从两个所述电机中,选取一个电机选定为待测电机,另一个电机选定为驱动电机;其中,步骤s10可理解为驱动器收到自动识别命令后,开始进入自动识别程序,并将该双驱系统中的一号电机选定为待测电机,将该双驱系统中的二号电机选定为驱动电机,在此说明,在进入自动识别步骤之前,驱动器默认已经满足运行状态,硬件检测正常,母线电压达到运行要求。
31.s20:通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,并在锁零稳定后,通过两个所述编码器分别获取当前状态下所述待测电机的第一反馈信号posa1和所述驱动电机反馈的第一反馈信号posb1;其中,锁零控制可理解为“刹车”控制,对当前状态进行停止锁定,待测电机的第一反馈信号posa1可理解为编码器反馈的脉冲信号或正弦波信号,以作为待测电机经锁零控制后的初始位置信号,驱动电机反馈的第一反馈信号posb1作为驱动电机当前的初始位置信号。在步骤s20中,参见图2,还包括如下步骤:s21:判断待测电机中是否连接有抱闸装置,若待测电机中没有连接抱闸装置,则所述逆变单元对所述待测电机的d轴注入第二预设直流电流;其中,步骤s21是针对待测电机中没有抱闸装置的操作,若待测电机中连接有抱闸装置,则所述逆变单元不对所述待测电机的所述抱闸装置输出松闸电压,实现对所述待测电机进行锁零控制。另外,d轴可理解为由编码器反馈角度减去转子磁偏角所得的方向。往待测电机的d轴注入第二预设直流电流,可以实现待测电机的转动。
32.s22:所述第二预设直流电流在向所述测试电机输入电流后,测试电机被拖动至所述第二预设直流电流方向,并进行锁零控制。
33.s30:通过与所述驱动电机相接的逆变单元往所述驱动电机的d轴注入第一预设直流电流,正向旋转所述驱动电机,通过两个所述编码器分别获取当前状态下所述待测电机的第二反馈信号posa2和所述驱动电机反馈的第二反馈信号posb2;再反向旋转所述驱动电机,通过两个所述编码器分别获取当前状态下所述待测电机的第三反馈信号posa3和所述驱动电机反馈的第三反馈信号posb3。
34.其中,驱动电机依据预设直流电流的方向,可先进行正向旋转,再进行反向旋转,以分别记录正向和反向旋转后,待测电机和驱动电机的状态信号也即第二反馈信号(posa2、posb2)、第三反馈信号(posa3、posb3)。在此说明,第二预设直流电流大于第一预设直流电流,可以确保驱动电机不会拖动待测电机进行转动,以影响待测电机的锁零控制,导致信号反馈不准确。
35.具体地,在步骤s30中,参见图3,还包括如下步骤:s31:所述逆变单元往所述驱动电机的d轴注入所述第一预设直流电流,所述驱动电机依据所述第一预设直流电流的方向进行正转。
36.s32:所述驱动电机正转一定预设角度后,通过两个所述编码器分别获取当前状态下所述待测电机的所述第二反馈信号posa2和所述驱动电机反馈的所述第二反馈信号
posb2;其中,驱动电机正转的一定预设角度可取0~360
°
中任意角度,在此并不限定,例如取45
°
、60
°
等。
37.s33:所述逆变单元往所述驱动电机的d轴注入所述第一预设直流电流,所述驱动电机依据所述第一预设直流电流的方向进行反转。
38.s34:所述驱动电机反转一定预设角度后,通过两个所述编码器分别获取当前状态下所述待测电机的所述第三反馈信号posa3和所述驱动电机反馈的所述第三反馈信号posb3;其中,驱动电机反转的一定预设角度同上,可取0~360
°
中任意角度,在此并不限定,例如取45
°
、60
°
等。
39.在另一实施例中,参见图4,步骤s30包括如下步骤:s35:判断驱动电机中是否连接有抱闸装置,若驱动电机中连接有抱闸装置,则所述逆变单元对所述驱动电机的所述抱闸装置输出松闸电压。
40.s36:所述逆变单元往所述驱动电机的d轴注入所述第一预设直流电流。
41.其中,步骤s35和步骤s36,是针对驱动电机中自带有抱闸装置的情况,先对驱动电机进行松闸的操作。
42.s40:将所获取到的所述待测电机的第一反馈信号posa1、所述待测电机的第二反馈信号posa2、所述待测电机的第三反馈信号posa3以及所述驱动电机的第一反馈信号posb1、所述驱动电机的第二反馈信号posb2、所述驱动电机的第三反馈信号posb3进行相互比较,判断所述待测电机的功率线缆顺序与对应连接的所述编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前所述待测电机的功率线缆顺序的信息。
43.其中,步骤s40用于判断待测电机和驱动电机的第一反馈信号(posa1、posb1)、第二反馈信号(posa2、posb2)和第三反馈信号(posa3、posb3)的大小,判断出待测电机的功率线缆顺序与对应连接的编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前待测电机的功率线缆顺序的信息,能够实现快速判断出待测电机与驱动器接线是否匹配,提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患。
44.具体地,在步骤s40中,参见图5,还包括如下步骤:s41:判断所述待测电机的第一反馈信号posa1、所述待测电机的第二反馈信号posa2和所述待测电机的第三反馈信号posa3是否都小于设定阈值,以及判断所述驱动电机的第二反馈信号posb2是否同时大于所述驱动电机的第一反馈信号posb1、所述驱动电机的第三反馈信号posb3;其中,判断比较待测电机的反馈信号与判断驱动电机的反馈信号,在此并限定判断的先后顺序,可同步进行。
45.s42:若判断任一者为否,则反馈出所述待测电机的功率线缆顺序与所述编码器的反馈线缆顺序不一致的信息;其中,反馈线缆顺序不一致的信息,可以为文字形式的“接线错位”,也可以为发出报警音,或者触发报警指示灯等。
46.s43:若判断两者都为是,则反馈出所述待测电机的功率线缆顺序与所述编码器的反馈线缆顺序一致的信息;
其中,反馈出的一致的信息,可以为文字形式的“接线正确”,也可以为发出报警音,或者触发报警指示灯等。至此,在本实施例中即可获取到待测电机,也即是一号电机的接线信息。
47.而为了能获取到另一台电机的接线信息,在步骤s43后,该方法还可以包括:s50:将已获取到功率线缆顺序的信息的电机选定为驱动电机,未获取到功率线缆顺序的信息的电机选定为待测电机;并重新进行通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,直到根据判断结果获取到当前待测电机的功率线缆顺序的信息;具体地,其可将本双驱系统中的二号电机选定为待测电机,将该双驱系统中的一号电机选定为驱动电机;并重新进行步骤s20-s40,以得到二号电机功率线缆顺序的信息。
48.其中,步骤s50可以实现判断同步电机中的每个电机与驱动器接线是否匹配,提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患。
49.另外,为了更清楚的了解本技术公开的一种同步电机与驱动器接线匹配自动识别方法,请参见图6,为对该方法流程进行举例,如下:s101:系统收到自动识别命令;s102:随机从两个电机中,选取一个电机a选定为待测电机,另一个电机b选定为驱动电机,s103:逆变单元a对电机a进行锁零控制,记录两个编码器反馈的电机a的位置信号posa1、电机b的位置信号posb1,s104:逆变单元b对电机b的d轴注入直流,先正向旋转电机b,记录两个编码器反馈的电机a的位置信号posa2、电机b的位置信号posb2,再反向旋转电机b,记录两个编码器反馈的电机a的位置信号posa3、电机b的位置信号posb3;s105:判断posa3、posa2与posa1的差值是否都小于设定阈值,若为否,可以直接判断出电机b与驱动器之间的接线错误,反馈错误信息;若为是,继续判断;s106:判断posb2是否大于posb1,且posb3小于posb2,若不是,则可以直接判断出电机a与驱动器之间的接线错误,反馈错误信息;若为是,则可以直接判断出电机a与驱动器之间的接线正确;s107:将电机b选定为待测电机,电机a选定为驱动电机,逆变单元b对电机b进行锁零控制,记录两个编码器反馈的电机a的位置信号posa4、电机b的位置信号posb4;s108:逆变单元a对电机a的d轴注入直流,先正向旋转电机b,记录两个编码器反馈的电机a的位置信号posa5、电机b的位置信号posb5,再反向旋转电机b,记录两个编码器反馈的电机a的位置信号posa6、电机b的位置信号posb6;s109:判断posb6、posb5与posb4的差值是否都小于设定值,若不是,则可以直接判断出电机b与驱动器之间的接线错误,反馈错误信息,若为是,则继续判断;s110:判断posa5是否同时大于posa4、posa6,若不是,则可以直接判断出电机b与驱动器之间的接线错误,反馈错误信息;若为是,则可以直接判断出电机b与驱动器之间的接线正确,提示识别完成。
50.综上所述,本技术公开的同步电机与驱动器接线匹配自动识别方法,通过从两个电机中,选取一个电机选定为待测电机,另一个电机选定为驱动电机;对待测电机进行锁零
控制,并在锁零稳定后,通过两个编码器分别获取当前状态下待测电机的第一反馈信号和驱动电机反馈的第一反馈信号;通过往驱动电机的d轴注入第一预设直流电流,正向旋转驱动电机,通过两个编码器分别获取当前状态下待测电机的第二反馈信号和驱动电机反馈的第二反馈信号;再反向旋转驱动电机,通过两个编码器分别获取当前状态下待测电机的第三反馈信号和驱动电机反馈的第三反馈信号;再将所获取到的待测电机的第一反馈信号、第二反馈信号、第三反馈信号以及所述驱动电机的第一反馈信号、第二反馈信号、第三反馈信号进行相互比较,判断待测电机的功率线缆顺序与对应连接的编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前待测电机的功率线缆顺序的信息,能够实现快速判断出待测电机与驱动器接线是否匹配,大大提高接线匹配的识别效率,以降低由于接线错误所造成的安全隐患;另外,通过将已获取到功率线缆顺序的信息的电机选定为驱动电机,未获取到功率线缆顺序的信息的电机选定为待测电机;并重新进行通过与待测电机相接的逆变单元对待测电机进行锁零控制,可以实现判断同步电机中的每个电机与驱动器接线是否匹配,提高接线匹配的识别效率。
51.另外,本实施例中各步骤的标号仅为方便说明,不代表对各步骤执行顺序的限定,在实际应用时,可以根据需要各步骤执行顺序进行调整,或同时进行,这些调整或者替换均属于本发明的保护范围。
52.第二方面,本技术提供的一种同步电机与驱动器接线匹配自动识别系统,包括:双驱系统,所述双驱系统包括:两个电机,每个所述电机均连接有一个逆变单元和一个编码器,所述逆变单元和编码器均与控制指令单元相接,参照图7,所述控制指令单元包括:待测电机选定模块10、锁零控制模块20、预设直流电流注入模块30、判断及信息获取模块40和待测电机转换模块50,待测电机选定模块10,用于待测电机选定模块,用于从两个所述电机中,选取一个电机选定为待测电机,另一个电机选定为驱动电机;锁零控制模块20与待测电机选定模块10相连接,用于通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,并在锁零稳定后,通过两个所述编码器分别获取当前状态下所述待测电机的第一反馈信号和所述驱动电机反馈的第一反馈信号;预设直流电流注入模块30与锁零控制模块20相连接,用于通过与所述驱动电机相接的逆变单元往所述驱动电机的d轴注入预设直流电流,正向旋转所述驱动电机,通过两个所述编码器分别获取当前状态下所述待测电机的第二反馈信号和所述驱动电机反馈的第二反馈信号;再反向旋转所述驱动电机,通过两个所述编码器分别获取当前状态下所述待测电机的第三反馈信号和所述驱动电机反馈的第三反馈信号;判断及信息获取模块40与预设直流电流注入模块30相连接,用于将所获取到的所述待测电机的第一反馈信号、所述待测电机的第二反馈信号、所述待测电机的第三反馈信号以及所述驱动电机的第一反馈信号、所述驱动电机的第二反馈信号、所述驱动电机的第三反馈信号进行相互比较,判断所述待测电机的功率线缆顺序与对应连接的所述编码器的反馈线缆顺序是否一致,并根据判断结果获取到当前所述待测电机的功率线缆顺序的信息;待测电机转换模块50与判断及信息获取模块40相连接,用于将已获取到功率线缆顺序的信息的电机选定为驱动电机,未获取到功率线缆顺序的信息的电机选定为待测电机;并重新进行通过与所述待测电机相接的逆变单元对所述待测电机进行锁零控制,直到根据判断结果获取到当前待测电机的功率线缆顺序的信息。
53.需要说明的是,本实施例公开的一种同步电机与驱动器接线匹配自动识别系统,
所实现的接线匹配自动识别方法如前述实施例所述,故在此不再进行详细讲述。可选地,本实施例中的各个模块、单元和上述其他操作或功能分别为了实现前述实施例中的方法。
54.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1