基于广义似然比检验的零速区间检测方法及系统与流程
1.本发明涉及定位导航技术领域,具体地,涉及一种基于广义似然比检验的零速区间检测方法及系统。
背景技术:
2.以gps为代表的全球卫星导航系统(gnss)广泛运用于户外定位并提供地图导航等服务。随着城市化发展,越来越多的摩天大楼、综合商超、交通枢纽和体育场馆已成为城市日常生活不可或缺的一部分。这些现代化的大型建筑,都拥有错综复杂的多层大面积室内空间。但在建筑物周边和室内环境中,由于存在卫星信号盲区或严重信号衰减和多径效应,gnss并不适用于因室内定位。在火灾救援等极端状况下,室内空间可能供电中断并充满浓烟。依赖于室内署大量的beacon设备的无线信号定位(wi-fi、蓝牙、rfid)、依赖于计算机视觉(摄像头)和可见光技术(led)并不能提供稳定有效的定位方案。与其他常用的传感器模式不同,惯性测量是不依赖于预先部署的基础设施、视线和能见度等因素。因此,基于惯性传感器(imu)的测量方法需要将惯性测量与初始测量多重积分换算到方向,速度和位置信息。然而,低成本惯性传感器受制于高传感器噪声,随着误差累积系统误差迅速增长。为了解决误差漂移问题并提升惯导系统的准确性,基于人体运动特征的纠偏方法被引入行人航位推算(pdr)系统。一般而言,行人导航系统依赖于安装于足部的imu,但imu安装位置也可包括臀部、膝盖、胸部等。常用的解决方案是基于足部imu的零速更新(zupt),在零速区间停止惯性导航,并修正传感器误差,减少了惯性导航的累积误差,具有稳定性强,精度高的优点。
3.在行人运动过程中,足部的运动遵循某些周期性的规律。在两个相邻运动状态之间脚部与地面接触时都会有一个相对静止的区间,也称作是零速区间,准确检测零速区间并在零速区间进行误差修正可以有效的抑制误差的积累。目前常用的几种零速区间检测方法为:加速度或角速率滑动方差检测(acceleration or angular rate moving variance),参考文献1:j. le scornec, m. ortiz, and v. renaudin,
ꢀ“
foot-mounted pedestrian navigation reference with tightly coupled gnss carrier phases, inertial and magnetic data,
”ꢀ
in proc. int. conf. indoor positioning indoor navigat. (ipin). sapporo, japan: ieee, sep. 2017, pp. 1
–
8.加速度或角速率滑动均值检测(acceleration or angular rate moving average),参考文献2:k. abdulrahim, c. hide, t. moore, and c. hill,
ꢀ“
integrating low cost imu with building heading in indoor pedestrian navigation,
”ꢀ
j. globalpositioning syst., vol. 10, no. 1, pp. 30
–
38, jun. 2011;加速度幅值检(acceleration magnitude),参考文献3:x. meng, s. sun, l. ji, j. wu, and w.-c. wong,
ꢀ“
estimation of centerof mass displacement based on gait analysis,
”ꢀ
in proc. int. conf. bodysensor netw., may 2011, pp. 150
–
155.角速率能量检测(angular rate energy detector),参考文献4:r. feliz alonso, e. zalama casanova, and j. g
ó
mez garc
í
a-bermejo,“pedestrian tracking using inertial sensors,
”ꢀ
j. phys. agents, vol. 3, no. 1,pp. 35
–
43, jan. 2009.姿态假设最优检测(stance hypothesis optimal detector),参考文献5:i. skong, p. handel, j.o. nilsson, and j. rantakokko,
ꢀ“
zero-velocity detection
ꢀ–ꢀ
an algorithm evaluation”, ieee transactions on biomedical engineering, vol. 57, no. 11, pp. 2657-2666, 2010.这些静止检测算法与零速修正算法结合,在人员走路步态下取得了较好的修正效果。然而,针对不同运动场景,比如,步行,跑动,爬楼梯等,以上传统零速检测法依赖的最优固定阈值有显著差异。这限制了传统零速区间检测法在复杂运动场景下的应用。对于传统方法,几乎不可能找到最优的固定阈值来应用于不同运动场景和不同人。
4.专利文献6m. ma, q. song, y. gu, y. li, and z. zhou,
ꢀ“
an adaptive zero velocity detection algorithm based on multi-sensor fusion for a pedestriannavigation system,
”ꢀ
sensors, vol. 18, no. 10, p. 3261, sep. 2018.中虽然同样额外增加压力传感器丰富采集到的传感器数据,但是该方法还是基于传统姿态假设最优检测的改进。由于深度神经网络模型相较于传统浅层神经网络能实现非常复杂的非线性多分类映射关系,已经被广泛运用于图像处理、自然语言处理等领域。在零速区间检测领域,深度神经网络比如(卷积网络和循环神经网络)被用于姿态分类和零速区间分类,参见y. kone, n. zhu, v. renaudin,
ꢀ“
machine learning-based zero-velocitydetection for inertial pedestrian navigation”, sensors. vol 20, no. 20, p. 12343, oct. 2020;b. wagstaff, v. peretroukhin, j.kelly,
ꢀ“
robust data driven zero velocity detection for foot-mounted inertial navigation”, sensors. vol 20, no. 20, p. 957-967. jan. 2020;b. wagstaff, v. peretroukhin, j.kelly,
ꢀ“
lstm-based zero velocity detection for robust inertial navigation”, in proc. int. conf. on indoor positioning and indoor navigation (ipin), 2018。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种基于广义似然比检验的零速区间检测方法及系统。
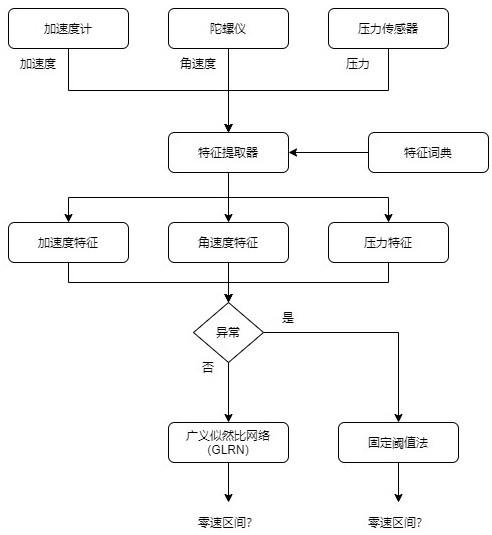
6.根据本发明提供的一种基于广义似然比检验的零速区间检测方法,包括如下步骤:信号采集步骤:基于传感设备采集加速度信号、角速度信号以及压力信号;特征词典构建步骤:利用领域知识构建特征词典;特征生成步骤:基于网络的特征提取器提取信号信息,并与特征词典结合,生成加速度特征、角速度特征以及压力特征作为输入信号;输入信号偏差判断步骤:判断输入信号与训练集信号是否有偏差,若判断结果为是,则通过固定阈值法检测零速区间;若判断结果为否,则采用神经网络模型检测零速区间。
7.优选地,所述特征词典包括如下任一项或者任多项特征:加速度模值、角速度模值、压力模值、方差、75%分位数、滑动窗口绝对值误差。
8.优选地,基于网络的特征提取器包括自编码器的编码器部分或者变分编码器的编
码器部分。
9.优选地,加速度信号通过加速度计采集;角速度信号通过陀螺仪采集;压力信号通过压力传感器采集。
10.优选地,所述固定阈值法的计算公式为:其中: 表示测量信号的广义似然比检测, 为长度为 的imu测量信号, 为加速度模值, 为滑动窗口内加速度的均值, 为重力加速度常量;用高斯分布来描述测量噪声, 为加速度测量的方差, 为角速度测量的方差, 为压力测量的方差, 为角速度, 为压力信号标量, 为前三个零速区间的压力信号平均值。
11.优选地,所述神经网络模型采用广义似然比检验,广义极大似然比的损失函数为:,其中:sigmoid函数保证数值在0到1的区间内,条件概率通过深度神经网络来估计。
12.优选地,深度神经网络包括卷积网络或者循环神经网络。
13.优选地,交叉熵被加入到损失函数中:其中 为可调节权重系数, 为交叉熵。
14.根据本发明提供的一种基于广义似然比检验的零速区间检测系统,包括如下模块:信号采集模块:基于传感设备采集加速度信号、角速度信号以及压力信号;特征词典构建模块:利用领域知识构建特征词典;特征生成模块:基于网络的特征提取器提取信号信息,并与特征词典结合,生成加速度特征、角速度特征以及压力特征作为输入信号;输入信号偏差判断模块:判断输入信号与训练集信号是否有偏差,若判断结果为是,则通过固定阈值法检测零速区间;若判断结果为否,则采用神经网络模型检测零速区间。
15.与现有技术相比,本发明具有如下的有益效果:1、本方法并非基于加速计和磁强计采集数据直接训练一个二分类器来确定检测零速区间。而是首先利用压力信息丰富数据的维度,同时利用基于神经网络的广义似然比检测来检测零速区间。
16.2、相对于传统方法以及目前文献中常用的各种数据驱动的零速区间方法,本发明在不同运动姿态下的稳定性和准确性更优。
17.3、本发明的零速区间检测运用于零速更新,可使得定位轨迹更平滑,最终的定位精度更高。
附图说明
18.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、
目的和优点将会变得更明显:图1为本发明的基于广义似然比检验的零速区间检测方法的算法流程图。
19.图2为似然比和零速检测结果比较示意图。
20.图3为根据不同零速区间检测法得到的运动轨迹示例图。
具体实施方式
21.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
22.众所周知,传感器总是存在噪声的,惯性导航这种积分运算,必然使得 imu 器件中的测量噪声不断的累积,从而造成定位和姿态误差。零速更新(zvpt)利用,支持足落地时加速度和角速度误差可观的假设来周期性修正。在支持足静止期间的零速区间,假设以下条件成立:加速度模值为一个重力加速度航向角没有变化,则零速区间的角速度为则此时刻的传感器测量误差可观。因此,可以定义假设检验,其中, 为长度为 的imu测量信号, 为长度为3的单位向量。零速区间检测的性能由虚警概率 和检出概率 描述。基于neyman-pearson定律的似然比检验(lr test)为在 的情况下最大化检出概率。由于概率分布和 未知。因此在假设独立同分布的高斯白噪声情况下,根据极大似然估计(mle),似然比lr可写为
ꢀꢀ
(1)其中 (2)依据公式(1),广义似然比检测(glr test)可以表述为 (3)最后,广义似然比检测的零速区间检测的目标为寻找一个阈值。
23.传统基于广义似然比检测的方法依赖很多假设,例如每帧得到的测量信号 服从独立同样的高斯分布。高斯分布为均值零,协方差矩阵为对角阵。
24.在 成立时,由于信号分布完全不可知,假设测量信号的似然函数为 (4)这些简化假设能近似计算广义似然比检测,然后这些假设并不符合实际情况。比如,独立同分布并的假设直接忽略了时间序列数据中的相关性。由于以上缺陷,在实际数据
中直接约束 并最大化的情况下最大化检出概率 不能很好地达到稳定的零速区间检测效果。
25.为了解决传统广义似然比检测的缺陷,本方法提出了以下改进:首先,本发明通过增加压力传感器提供额外压力数据。
26.其次,为了减少网络的复杂度和降低计算复杂性,从传感器采集到的信号并不作为神经网络的直接输入。我们利用领域知识构建了特征词典,并和基于网络的特征提取器相结合来生成加速度特征,角速度特征和压力特征。特征词典包含且不局限于以下特征:加速度/角速度/压力的模值,方差,75%分位数,滑动窗口绝对值误差等。基于网络的特征提取器是并不局限于自编码器(autoencoder)和变分编码器(variational autoencoder)的编码器部分(encoder)。
27.当输入信号和训练集有显著偏差的时候,传统数据驱动的黑盒方法的结果往往不够稳定。为了提供算法的稳定性,我们额外使用一个异常处理模块来协助算法评估当前输入信号和训练集信号的相似度。当异常处理模块认为当前输入信号和训练集信号有显著差异时,零速区间的检测为使用固定阈值法来处理。
28.固定阈值法的计算逻辑可以从公式(1)和(2)扩展可得:
ꢀꢀ
(5)其中 为压力信号标量, 为前三个零速区间的压力信号平均值。
29.为了消除传统广义似然比例检测依赖的假设,本方法利用神经网络模型来估算似然比,我们把该模型定义为广义似然比检验(glrn)。对于广义似然比测试,可定义为 和 ,式(1)就改写为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)依据贝叶斯定理,后验概率为
ꢀꢀꢀꢀꢀꢀ
(6)当独立同分布假设成立时,公式(6)简化为为了捕捉时间序列的不同帧间的相关性,这里考虑n阶马氏链(n order markov process),因此,公式(1)可以写为
ꢀꢀꢀꢀ
(7)由公式(7)可以定义广义极大似然比的损失函数为 (8)其中sigmoid函数保证数值在0到1的区间内。式(8)的条件概率可以通过深度神经网络来估计。网络结构可为卷积网络、循环神经网络等。最后,为了保证广义似然比检验稳定收敛,交叉熵被加入到损失函数中
其中 为可调节权重系数, 为交叉熵。
30.相对于传统方法以及目前文献中常用的各种数据驱动的零速区间方法,本发明在不同运动姿态下的稳定性和准确性更优。如图2所示,本发明相较于常用的长短记忆循环神经网络(lstm),本发明提出的方法能够更准确的检测到零速区间。图2中,虚线为lstm的检测结果,实线为llrnet的检测结果。相较于lstm,llrnet能够更加准确的捕捉到零速区间。
31.图3为根据不同零速区间检测法得到的运动轨迹示例,llrnet能减小累计定位误差。
32.表1:累计4.6公里的平均最终定位误差ꢀlstm(m)llrnet(m)快走4.3063.367慢走1.0461.010表1为分别进行10次快走和10次慢走的实验,累计距离为4.6公里。表1中,在快走和慢走的姿态下,本发明提出的方法相较于长短记忆循环神经网络,能获得更高的定位精度。
33.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1