一种车联网3D实时地图与3D轨迹回放系统的制作方法
一种车联网3d实时地图与3d轨迹回放系统
技术领域
1.本发明属于车联网技术领域,尤其涉及一种车联网3d实时地图与3d轨迹回放系统。
背景技术:
2.车联网是以行驶中的车辆为信息感知对象,借助新一代信息通信技术,实现车与云平台、车与车、车与路、车与人、车内等全方位之间的网络连接,车与车之间的通信是指车辆与车辆之间实现信息交流与信息共享,包括车辆位置、行驶速度等车辆状态信息,可用于判断道路车流状况,车与路间的通信是指借助底面道路固定通信设施实现车辆与道路间的信息交流,用于检测道路路面状况,引导车辆选择最佳行驶路径,同时可生成车辆的行驶轨迹信息;车与车、车与路之间的通信可通过地图系统和轨迹回放系统体现。
3.地图系统通常与轨迹回放系统集成一体,现有技术的地图系统通常采用传统的2d地图实现,2d地图比较单调,使得车辆的展示不够明显,不能准确体现出车辆的行驶轨迹,视觉质感较差,为解决2d地图带来的体验感较差的问题,现有的还有采用3d地图,目前市场上常见的3d地图系统在3d轨迹回放技术的应用较少,不能直观的观察车辆的位置信息。
技术实现要素:
4.本发明所解决的技术问题在于提供一种车联网3d实时地图与3d轨迹回放系统,通过3d效果的实时地图和轨迹回放,让用户更客观和更直观的观察到车辆的位置信息。
5.本发明提供的基础方案:一种车联网3d实时地图与3d轨迹回放系统,包括:
6.地图生成模块:用于根据地图数据生成3d地图;
7.数据处理模块:从车联网数据中轮询获取目标车辆的坐标点数据,每次提取坐标点数据中未被提取过的前两个坐标点,提取完成后通过预设的时间阈值重复轮询被提取的坐标点数据,生成轨迹信息,并结合轨迹纠偏处理轨迹信息,生成目标车辆的移动轨迹数据;
8.所述数据处理模块还用于从车联网数据中获取车辆的基础数据,并生成车辆标记和车辆基础信息;
9.3d实时地图模块:将数据处理模块生成的车辆的移动轨迹数据、车辆标记以及车辆基础信息同步至3d地图上并进行实时展示;
10.3d轨迹回放模块:用于根据生成的车辆的移动轨迹数据和车辆标记,在3d地图上回放车辆的行驶轨迹。
11.本发明的原理及优点在于:本技术的一种车联网3d实时地图与3d轨迹回放系统,包括有地图生成模块、数据处理模块、3d实时地图模块以及3d轨迹回放模块,其中,通过地图生成模块根据已有的地图数据构建3d地图,数据处理模块再根据车联网上传的车辆坐标点数据进行轮询,每次提取坐标点数据中的前两条未被提取过的数据,一方面保证每一次轮询的坐标点数据是新的和有效的,另一方面每个坐标点都能被获取,使得车辆的行驶轨
迹中不会出现空缺部分保证轨迹的完整性,提取完成后通过预设的时间阈值再次轮询被提取的坐标点数据,从而生成轨迹信息,再次轮询是用来生成车辆的实时移动信息,结合轨迹纠偏进行处理,最后生成的车辆移动轨迹数据通过在3d地图上进行展示,即能够直观的将车辆的实时移动轨迹呈现给用户;同时3d轨迹回放模块还将车辆的移动轨迹数据在3d地图上进行轨迹回放,生成的3d轨迹回放效果与3d实时地图上生成的移动轨迹相同,使得用户更客观的观察到车辆的行驶轨迹;
12.此外数据处理模块还通过将车联网上传的车辆基础数据生成车辆标记和车辆的基础信息,并将其在3d实时地图模块和3d轨迹回放模块上进行展示,使得用户在查看车辆的移动轨迹信息时还能够通过车辆标记查看想要查询的目标车辆以及目标车辆的一些基础信息。
13.因此,本技术的优点在于:通过数据处理模块将车辆的坐标点数据实时生成车辆的移动轨迹,并在3d地图上进行实时展示和生成轨迹回放,使得用户能够更直观和更客观的了解到车辆的移动情况,同时加入车辆标记和车辆基础信息识别,使得用户能够有针对性地查询目标车辆,提升用户地体验感。
14.进一步,所述数据处理模块包括坐标获取单元和轨迹计算单元,所述预设的时间阈值至少包括第一时间阈值、第二时间阈值以及第三时间阈值,所述第一时间阈值为第二时间阈值的一半,所述第三时间阈值小于第二时间阈值;所述坐标获取单元用于根据第一时间阈值获取目标车辆在历史记录中的当前时间段的坐标点数据,并判断是否位有效数据,直至获取到坐标点数据中的前两条有效坐标点数据;所述轨迹计算单元用于根据第二时间阈值轮询坐标获取单元获取到的前两条有效坐标点数据计算车辆的有效移动轨迹数据,再根据第三时间阈值重复轮询第二时间阈值生成的有效移动轨迹数据并进行计算,生成目标车辆实时移动轨迹数据。
15.有益效果:首先通过坐标获取单元来获取车辆的坐标点数据中的前两条有效坐标数据,即根据设定的第一时间阈值来轮询获取,轨迹计算单元首先根据设定的第二时间阈值来轮询第一时间阈值获取到的两条坐标点数据,通过计算生成车辆的有效移动轨迹数据,此时根据第二时间阈值计算获得车辆有效移动轨迹为两个坐标点之间的轨迹信息,再根据第三时间阈值轮询第二时间阈值计算得到的有效移动轨迹,此时能够生成一个完整的车辆移动轨迹数据,同时第三时间阈值小于第二时间阈值,使得根据第三时间阈值每次轮询时获得的车辆移动轨迹数据不会出现轨迹缺失的情况。
16.进一步,所述3d轨迹回放模块包括轨迹渲染模块和轨迹切换模块,所述轨迹渲染模块用于根据轨迹纠偏将3d轨迹回放渲染生成高精率3d轨迹回放和轨迹点3d轨迹回放,所述高精率3d轨迹回放为通过车辆上传的坐标,角度,速度,时间戳方式进行轨迹纠偏,并在3d轨迹回放中展示出车辆行驶的轨迹线;所述轨迹点3d轨迹回放为通过坐标点纠偏在3d轨迹回放中展示出轨迹点和轨迹线;所述轨迹切换模块用于切换高精率3d轨迹回放和轨迹点3d轨迹回放。
17.有益效果:高精率的3d轨迹回放的纠偏率高,但是缺少轨迹点详情,通过轨迹点型的3d轨迹回放,满足用户想要查询某一事件的轨迹点详情,通过轨迹切换单元方便用户根据自己的需求切换相应的3d轨迹回放。
18.进一步,所述3d轨迹回放模块还包括进度条渲染模块、轨迹筛选模块、轨迹定位模
块以及轨迹分析模块,所述进度条渲染模块用于在3d地图顶部渲染出轨迹进度条;所述轨迹筛选模块用于筛选3d轨迹回放中的时间范围、限速区域、越线区域、漂移点、定位点、停车点以及停车时长,所述轨迹定位模块用于根据轨迹筛选模块的筛选结果和进度条渲染模块渲染出的进度条定位至3d轨迹回放相应的进度,所述轨迹分析模块根据轨迹线和轨迹点进行轨迹明细分析、报警记录分析、速度分析以及停车分析。
19.有益效果:通过进度条渲染模块渲染出的轨迹进度条,供用户调整3d轨迹回放的进度和速度,还用于供用户针对3d轨迹回放进行暂停以及重置,通过轨迹筛选模块能够供用户筛选3d轨迹回放中想要查询的相关数据,提升用户的使用体验感,通过轨迹定位模块能够准确定位用户查询的3d轨迹回放的进度位置,通过轨迹分析模块可以对车辆行驶的轨迹线和轨迹点进行数据分析,方便用户查看和改正驾驶习惯。
20.进一步,所述车辆基本信息包括车辆详情信息、油量信息、驾驶员信息、限速区域以及视频监控信息,所述车辆标记包括车牌号标记和车辆状态标记,所述车辆状态标记具体为:将行驶状态车辆标记为蓝色,停车状态车辆标记为绿色,异常状态车辆标记为黄色,报警状态车辆标记为红色,离线状态车辆标记为灰色。
21.有益效果:通过车辆基本信息用户能够查看车辆的基本状况,通过车牌号标记和车辆状态标记用户能够直观查询到目标车辆以及目标车辆的状态。
22.进一步,所述地图生成模块包括地图切换单元、昼夜渲染单元、图层切换单元以及模糊查询单元,所述地图切换单元用于2d地图和3d地图的切换,所述昼夜渲染单元用于根据昼夜模式渲染3d地图样式,所述图层切换单元用于标准图层和卫星图层的切换,所述卫星图层中包括可自定义加载的路网及路况,所述模糊查询单元用于根据用于输入的模糊地址定位到查询地址。
23.有益效果:通过切换单元能够方便用户进行2d地图和3d地图的切换,通过昼夜渲染单元方便用户按需切换昼夜模式,通过图层切换单元方便用户进行标准图层和卫星图层之间的切换,通过模糊查询单元方便用户输入模糊地址即可查询到详细地址,提升用户体验感。
24.进一步,还包括存储模块,所述存储模块用于存储3d轨迹回放模块生成的3d轨迹回放。
25.有益效果:通过存储模块方便用户随时查看3d轨迹回放。
26.进一步,还包括清除模块,所述清除模块用于清除3d轨迹回放模块和3d实时地图模块生成的数据。
27.有益效果:因为驾驶的路径和路况可能存在不相同,用户想要查询3d轨迹回放视频的目标也不同,通过清除模块能够在用户使用完3d地图界面或者轨迹回放功能后进行初始化,方便下一次使用。
附图说明
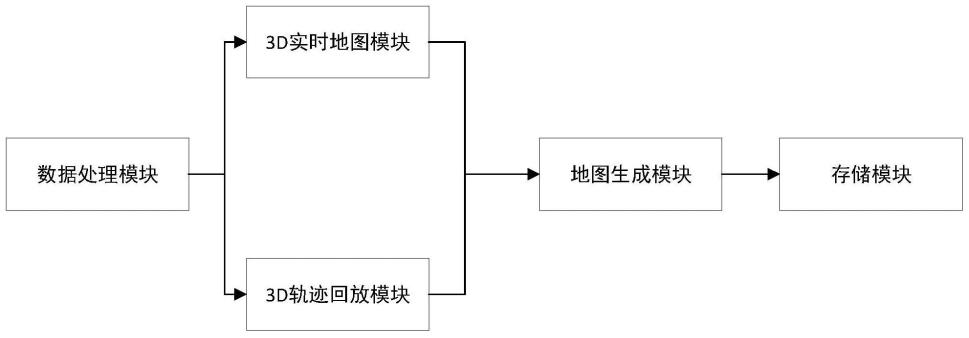
28.图1为本发明实施例的功能框图;
29.图2为本发明实施例的流程框图。
具体实施方式
30.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明,同时,虽然在实施例中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或所描述的步骤。
31.下面通过具体实施方式进一步详细说明:
32.实施例基本如图1和图2所示:一种车联网3d实时地图与3d轨迹回放系统,其基于现有的车联网技术和高德地图的相关api构建,具体为,包括地图生成模块、数据处理模块、3d实时地图模块、3d轨迹回放模块存储模块以及清除模块,其中:
33.地图生成模块用于根据地图数据生成3d地图,在本实施例中,地图生成模块包括地图切换单元、昼夜渲染单元、图层切换单元以及模糊查询单元,所述地图切换单元用于2d地图和3d地图的切换,所述昼夜渲染单元用于根据昼夜模式渲染3d地图样式,所述图层切换单元用于标准图层和卫星图层的切换,所述卫星图层中包括可自定义加载的路网及路况,所述模糊查询单元用于根据用于输入的模糊地址定位到查询地址;具体实现方式为:首先调用高德地图的api-jsapi,利用amaploader的方式进行3d地图的加载和渲染,加载时设定自定义视角、范围以及地图样式,地图加载完成后利用高德地图的api选择插件和工具加载出车辆树模型,加载插件包括amap.moveanimation,amap.grasproad,amap.maptype,amap.placesearch,amap.geocoder等。
34.数据处理模块用于从车联网数据中轮询获取目标车辆的坐标点数据,每次提取坐标点数据中未被提取过的前两个坐标点,提取完成后通过预设的时间阈值重复轮询被提取的坐标点数据,生成轨迹信息,并结合轨迹纠偏处理轨迹信息,生成目标车辆的移动轨迹数据;数据处理模块包括坐标获取单元和轨迹计算单元,预设的时间阈值通过定时器set timeout实现,预设的时间阈值至少包括第一时间阈值、第二时间阈值以及第三时间阈值,第一时间阈值为第二时间阈值的一半,第三时间阈值小于第二时间阈值;例如:第一时间阈值设为5s,则第二时间阈值设为10s,第三时间阈值设有8s,坐标获取单元用于根据第一时间阈值获取目标车辆在历史记录中的当前时间段的坐标点数据,并判断是否位有效数据,直至获取到坐标点数据中的前两条有效坐标点数据;轨迹计算单元用于根据第二时间阈值轮询坐标获取单元获取到的前两条有效坐标点数据计算车辆的有效移动轨迹数据,再根据第三时间阈值重复轮询第二时间阈值生成的有效移动轨迹数据并进行计算,生成目标车辆实时移动轨迹数据;具体实施流程为:先根据当前时间获取当前车辆历史记录中的当前时间段之前几条数据,如果没有历史点位数据,则车辆不马上进行移动,通过定时器获取之后几次的点位数据之后,再进行对数据的处理,如果有数据,则每次取数据的前面两条,进行点位以及轨迹的纠偏,然后通过高德提供的移动api进行,两个坐标点之间的移动,通过定时器预设一定的时间阈值,在车辆即将移动到两个点的终点的时候,删除使用的前两条坐标点数据,然后销毁当前地图车辆,然后立即又获取新的前两条数据,进行重复操作,如果中途出现点位数据缺省,则暂停移动车辆,等定时器重新执行逻辑后,再次判断是否有点位进行处理,此时的定时器是一直存在。
35.此外,数据处理模块还用于从车联网数据中获取车辆的基础数据,并生成车辆标记和车辆基础信息;其中,车辆基本信息包括车辆详情信息、油量信息、驾驶员信息、限速区域以及视频监控信息,车辆标记包括车牌号标记和车辆状态标记,其中车牌号标记在本实
施例中选择10辆车的车牌号进行标记,车辆状态标记具体为:将行驶状态车辆标记为蓝色,停车状态车辆标记为绿色,异常状态车辆标记为黄色,报警状态车辆标记为红色,离线状态车辆标记为灰色。
36.3d实时地图模块用于将数据处理模块生成的车辆的移动轨迹数据、车辆标记以及车辆基础信息同步至3d地图上并进行实时展示。
37.3d轨迹回放模块用于根据生成的车辆的移动轨迹数据和车辆标记,在3d地图上回放车辆的行驶轨迹,3d轨迹回放模块包括轨迹渲染模块、轨迹切换模块、进度条渲染模块、轨迹筛选模块、轨迹定位模块以及轨迹分析模块,轨迹渲染模块用于根据轨迹纠偏将3d轨迹回放渲染生成高精率3d轨迹回放和轨迹点3d轨迹回放,高精率3d轨迹回放为通过车辆上传的坐标,角度,速度,时间戳方式进行轨迹纠偏,并在3d轨迹回放中展示出车辆行驶的轨迹线;轨迹点3d轨迹回放为通过坐标点纠偏在3d轨迹回放中展示出轨迹点和轨迹线,在本实施例中,轨迹纠偏主要分为“高精度轨迹纠偏(线)”以及“坐标点纠偏(点)”两种方式,“高精度轨迹纠偏”使用了高德提供的amap.grasproad插件,通过选中的车辆的轨迹集合获取到车辆信息中的经度,纬度,速度,角度,以及上一个轨迹点与当前轨迹点之间的时间差(这里是以秒为单位)数据集合,调用高德api返回轨迹数据,然后进行去重处理,返回最后的轨迹数据进行处理;“坐标点纠偏”的方式是根据获取到的经度,纬度,通过“卫星椭球坐标投影到平面地图坐标系的投影因子”以及“椭球的偏心率”计算出纠偏后的坐标点;因此,高精率3d轨迹回放是通过车辆上传的坐标、角度、速度、时间戳利用高德地图的轨迹纠偏方式进行轨迹纠偏,然后使用polyline准确的绘制出车辆行驶的轨迹,轨迹点3d轨迹回放通过坐标点的纠偏之后,使用marker和polyline在地图中同时绘制出轨迹点和轨迹线;此外,在本实施例中,在调用“高精度轨迹纠偏”的时候,在调用之前,都会进行一次“坐标点纠偏”。
38.轨迹切换模块用于切换高精率3d轨迹回放和轨迹点3d轨迹回放,方便用户切换。
39.进度条渲染模块用于在3d地图顶部渲染出轨迹进度条;通过进度条调节轨迹回放的进度、速度、暂停以及重置,同时本实施例中将轨迹切换模块功能集成在进度条上,使得进度条还能够同时切换3d轨迹回放。
40.轨迹筛选模块用于筛选3d轨迹回放中的时间范围、限速区域、越线区域、漂移点、定位点、停车点以及停车时长,轨迹定位模块用于根据轨迹筛选模块的筛选结果和进度条渲染模块渲染出的进度条定位至3d轨迹回放相应的进度。
41.轨迹分析模块根据轨迹线和轨迹点进行轨迹明细分析、报警记录分析、速度分析以及停车分析。
42.存储模块用于存储3d轨迹回放模块生成的3d轨迹回放,方便用户后续查看。
43.清除模块用于清除3d轨迹回放模块和3d实时地图模块生成的数据,因为用户每次驾驶的路径和路况可能存在不相同,用户想要查询轨迹回放的目标也不同,通过清除模块能够在用户使用完3d地图界面或者轨迹回放功能后进行初始化,方便下一次使用。
44.以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障
碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1