对大幅宽区域快速成像的SAR二维波束扫描方法及电子设备
对大幅宽区域快速成像的sar二维波束扫描方法及电子设备
技术领域
1.本发明属于雷达发射信号处理技术领域,具体涉及一种对大幅宽区域快速成像的sar二维波束扫描方法及电子设备。
背景技术:
2.随着空间信息技术的快速发展,控制和利用空间成为世界军事强国谋求的重要目标之一。合成孔径雷达(synthetic aperture radar,简称sar)由于其不受天气、气候的影响,能全天时、全天候、高分辨率、大区域对地观测,已经成为空间对地观测的重要手段。机载sar作为一种快速获取地表变化的有效手段,随着近年来的不断发展,已经广泛应用于国土测绘、资源调查、军事侦查、环境监测等诸多领域中。
3.在合成孔径雷达成像技术中高分辨率大测绘带成像是合成孔径雷达技术发展追求的目标,解决方法主要是通过波束扫描,在分辨率和测绘带等性能间进行折衷。随着合成孔径雷达应用领域的研究不断拓展和深入,越来越多的观测任务对sar的性能指标提出了更为苛刻的要求,不仅要求合成孔径雷达具有一定分辨率和大测绘带,还要求其能够实现快速成像,这就对系统设计方面提出了新的挑战。在一般的机载系统中,tops扫描模式通过波束方位向扫描在短时间内实现了大范围方位向观测,但在实际中,当在相同时间内对成像场景并不需要有太高的方位分辨率而需要更大的宽测绘带时,tops扫描模式不再满足要求。而合成孔径雷达提高观测带的做法是采用scansar扫描模式,通过波束扫描可以获得多条子测绘带,通过子观测带的拼接得到纵向超宽的地面观测带。但是传统scansar扫描模式虽然可以提高距离向观测带宽度,但方位向观测带宽度还是受限于固有天线波束宽度,并没有提高。
4.因此,需要寻求一种新的扫描方式,以实现在短时间内对宽测绘带的快速、有效成像。
技术实现要素:
5.为了解决现有技术中存在的上述问题,本发明提供了一种对大幅宽区域快速成像的sar二维波束扫描方法及电子设备。本发明要解决的技术问题通过以下技术方案实现:
6.第一方面,本发明实施例提供了一种对大幅宽区域快速成像的sar二维波束扫描方法,包括:
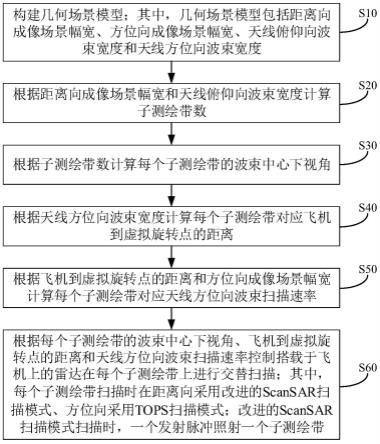
7.构建几何场景模型;其中,所述几何场景模型包括距离向成像场景幅宽、方位向成像场景幅宽、天线俯仰向波束宽度和天线方位向波束宽度;
8.根据所述距离向成像场景幅宽和所述天线俯仰向波束宽度计算子测绘带数;
9.根据所述子测绘带数计算每个子测绘带的波束中心下视角;
10.根据所述天线方位向波束宽度计算每个子测绘带对应飞机到虚拟旋转点的距离;
11.根据所述飞机到虚拟旋转点的距离和所述方位向成像场景幅宽计算每个子测绘带对应天线方位向波束扫描速率;
12.根据所述每个子测绘带的波束中心下视角、所述飞机到虚拟旋转点的距离和所述天线方位向波束扫描速率控制搭载于飞机上的雷达在每个子测绘带上进行交替扫描;其中,每个子测绘带扫描时在距离向采用改进的scansar扫描模式、方位向采用tops扫描模式;所述改进的scansar扫描模式扫描时,一个发射脉冲照射一个子测绘带。
13.在本发明的一个实施例中,所述几何场景模型还包括距离向成像场景近端地距和飞机飞行高度;对应所述根据所述距离向成像场景幅宽和所述天线俯仰向波束宽度计算子测绘带数,包括:
14.根据所述距离向成像场景近端地距、所述飞机飞行高度和所述距离向成像场景幅宽计算飞机距离向对应的天线下视角范围;
15.根据所述天线下视角范围和所述天线俯仰向波束宽度计算子观测带数。
16.在本发明的一个实施例中,所述根据所述子测绘带数计算每个子测绘带的波束中心下视角,包括:
17.根据所述子观测带数、所述天线下视角范围和所述天线俯仰向波束宽度计算每个子观测带的波束重叠部分;
18.根据所述距离向成像场景近端地距、所述飞机飞行高度、所述天线俯仰向波束宽度和所述每个子测绘带的波束重叠部分计算每个子测绘带的波束中心下视角。
19.在本发明的一个实施例中,所述根据所述天线方位向波束宽度计算每个子测绘带对应飞机到虚拟旋转点的距离,包括:
20.计算飞机到每个子测绘带的中心斜距;
21.根据所述天线方位向波束宽度计算条带模式下的方位向分辨率;
22.根据tops扫描模式的方位分辨率和所述条带模式的方位分辨率的比值关系,以及所述中心斜距计算每个子测绘带对应飞机到虚拟旋转点的距离。
23.在本发明的一个实施例中,所述几何场景模型还包括飞机飞行速度,对应根据所述飞机到虚拟旋转点的距离和所述方位向成像场景幅宽计算每个子测绘带对应天线方位向波束扫描速率之前,还包括:
24.根据所述tops扫描模式的方位分辨率和所述条带模式的方位分辨率的比值关系,以及所述方位向成像场景幅宽计算飞机飞行距离;
25.根据所述飞机飞行距离和所述飞机飞行速度计算每个子测绘带对应扫描成像时间。
26.在本发明的一个实施例中,所述根据所述飞机到虚拟旋转点的距离和所述方位向成像场景幅宽计算每个子测绘带对应天线方位向波束扫描速率,包括:
27.根据所述方位向成像场景幅宽、所述飞机到虚拟旋转点的距离和所述中心斜距计算每个子测绘带对应方位向视角范围;
28.根据所述方位向视角范围和所述扫描成像时间计算每个子测绘带对应天线方位波束扫描速率。
29.在本发明的一个实施例中,还包括:
30.计算每个子测绘带的发射脉冲重复频率;其中,所述发射脉冲重复频率用于保证无模糊扫描成像。
31.在本发明的一个实施例中,所述计算每个子测绘带的发射脉冲重复频率,包括:
32.根据雷达的多普勒带宽计算最小发射脉冲重复频率;
33.根据飞机到最远端子测绘带的中心斜距计算最大发射脉冲重复频率;
34.根据所述最小发射脉冲重复频率和所述最大发射脉冲重复频率计算每个子测绘带的发射脉冲重复频率。
35.第二方面,本发明实施例提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,所述处理器、所述通信接口、所述存储器通过所述通信总线完成相互的通信;
36.所述存储器,用于存放计算机程序;
37.所述处理器,用于执行所述存储器上所存放的程序时,实现上述任一所述的对大幅宽区域快速成像的sar二维波束扫描方法的步骤。
38.本发明的有益效果:
39.本发明提出的对大幅宽区域快速成像的sar二维波束扫描方法,是一种新的扫描方法,通过构建几何场景模型,并根据几何场景模型设计扫描时的关键参数,包括子测绘带数,以及每个子测绘带的波束中心下视角、飞机到虚拟旋转点的距离和天线方位向波束扫描速率,通过这些参数控制搭载于飞机上的雷达在每个子测绘带上进行交替扫描,每个子测绘带扫描时在距离向采用改进的scansar扫描模式、方位向采用tops扫描模式,且改进的scansar扫描模式在扫描时,一个发射脉冲照射一个子测绘带。本发明提出的扫描方法相对于只是用tops扫描模式,实现了在相同时间内对距离向宽测绘带的快速扫描成像,相对于传统的scansar扫描模式,实现了在相同时间内对方位向宽测绘带的快速扫描成像。因此,在指定的距离向和方位向测绘带宽内,本发明提出的扫描方法所用的成像时间比单独采用tops扫描模式或传统scansar扫描模式都少,能够实现快速成像。
40.以下将结合附图及实施例对本发明做进一步详细说明。
附图说明
41.图1是本发明实施例提供的一种对大幅宽区域快速成像的sar二维波束扫描方法的流程示意图;
42.图2是本发明实施例提供的几何场景模型示意图;
43.图3是本发明实施例提供的几何场景模型中每个子测绘带的波束中心下视角示意图;
44.图4是本发明实施例提供的一种电子设备的结构示意图。
具体实施方式
45.下面结合具体实施例对本发明做进一步详细的描述,但本发明的实施方式不限于此。
46.实施例一
47.经发明人研究发现,不管是tops扫描模式,还是传统scansar扫描模式,均无法同时满足成像时间短与测绘带宽度宽这样的需求。而随着观测任务对sar性能指标的更为苛刻的要求,急需要寻求一种新的扫描方式,以实现在短时间内对宽测绘带的快速、有效成像。
48.基于上述存在的问题,为了实现对大幅宽区域的快速成像,本发明实施例提供了一种对大幅宽区域快速成像的sar二维波束扫描方法。扫描过程中,根据实际的场景,如何设计扫描控制参数至关重要,不合理的参数设计,会严重影响扫描成像效果。请参见图1,本发明实施例提供了一种对大幅宽区域快速成像的sar二维波束扫描方法,合理设计了扫描控制参数,使得tops扫描模式与改进的scansar扫描模式在该扫描控制参数下可以有效结合,实现对大幅宽区域的快速成像,具体包括以下步骤:
49.s10、构建几何场景模型。
50.具体而言,请参见图2和图3,本发明实施例构建的几何场景模型包括距离向成像场景幅宽wg、方位向成像场景幅宽wa、天线俯仰向波束宽度θf、天线方位向波束宽度θa、距离向成像场景近端地距x0、飞机飞行高度h和飞机飞行速度vs。
51.s20、根据距离向成像场景幅宽wg和天线俯仰向波束宽度θf计算子测绘带数。
52.具体而言,本发明实施例根据距离向成像场景幅宽wg和天线俯仰向波束宽度θf计算子测绘带数,包括:
53.s201、根据距离向成像场景近端地距x0、飞机飞行高度h和距离向成像场景幅宽wg计算飞机距离向对应的天线下视角范围,公式表示为:
[0054][0055]
s202、根据天线下视角范围和天线俯仰向波束宽度θf计算子观测带数,公式表示为:
[0056][0057]
其中,ceil(
·
)表示向上取整。
[0058]
s30、根据子测绘带数n计算每个子测绘带的波束中心下视角。
[0059]
具体而言,本发明实施例根据子测绘带数n计算每个子测绘带的波束中心下视角,包括:
[0060]
s301、根据子观测带数n、天线下视角范围和天线俯仰向波束宽度θf计算每个子观测带的波束重叠部分。对于所有子观测带的波束重叠部分计算公式表示为:
[0061][0062]
则对应每个子测绘带的波束重叠部分公式表示为:
[0063][0064]
其中,θ
ri
表示第i个子测绘带的波束重叠部分。
[0065]
s302、根据距离向成像场景近端地距x0、飞机飞行高度h、天线俯仰向波束宽度θf和每个子测绘带的波束重叠部分θ
ri
计算每个子测绘带的波束中心下视角,公式表示为:
[0066]
[0067]
其中,θi表示第i个子测绘带的波束中心下视角。
[0068]
s40、根据天线方位向波束宽度θa计算每个子测绘带对应飞机到虚拟旋转点的距离。
[0069]
具体而言,虚拟旋转点(虚拟旋转中心)为tops扫描模式对应的一场景外虚拟旋转点,本发明实施例根据天线方位向波束宽度θa计算每个子测绘带对应飞机到虚拟旋转点的距离,包括:
[0070]
s401、计算飞机到每个子测绘带的中心斜距,记为表示第i个子测绘带的中心斜距(图2只是示意性的画出一子测绘带的中心斜距);采用现有计算中心斜距的方法均可,在此不详细说明。
[0071]
s402、根据天线方位向波束宽度θa计算条带模式下的方位向分辨率,公式表示为:
[0072][0073]
其中,λ表示波长。
[0074]
s402、根据tops扫描模式的方位分辨率和条带模式的方位分辨率ρ
a-strip
的比值关系,以及中心斜距计算每个子测绘带对应飞机到虚拟旋转点的距离,公式表示为:
[0075][0076]
其中,ρ
a-tops
表示tops扫描模式的方位分辨率,在这里是已知量,取值比如可以为3,表示第i个子测绘带对应飞机到虚拟旋转点的距离。
[0077]
需要说明的是,条带模式是星载sar常用的成像模式,在此不做详细介绍。这里,只是利用条带模式下的方位分辨率来计算本发明提出方法的关键扫描参数。
[0078]
s50、根据飞机到虚拟旋转点的距离和方位向成像场景幅宽wa计算每个子测绘带对应天线方位向波束扫描速率。
[0079]
具体而言,本发明实施例在计算每个子测绘带对应天线方位向波束扫描速率之前,还包括:
[0080]
s501、根据tops扫描模式的方位分辨率ρ
a-tops
和条带模式的方位分辨率ρ
a-strip
的比值关系,以及方位向成像场景幅宽wa计算飞机飞行距离,公式表示为:
[0081][0082]
s502、根据飞机飞行距离s和飞机飞行速度vs计算每个子测绘带对应扫描成像时间,公式表示为:
[0083][0084]
可见,本发明实施例每个子测绘带的扫描成像时间t相同。
[0085]
进一步地,本发明实施例根据飞机到虚拟旋转点的距离和方位向成像场景幅
宽wa计算每个子测绘带对应天线方位向波束扫描速率,包括:
[0086]
s503、根据方位向成像场景幅宽wa、飞机到虚拟旋转点的距离和中心斜距计算每个子测绘带对应方位向视角范围,公式表示为:
[0087][0088]
其中,表示第i个子测绘带对应方位向视角范围。
[0089]
s504、根据方位向视角范围和扫描成像时间t计算每个子测绘带对应天线方位波束扫描速率,公式表示为:
[0090][0091]
其中,表示第i个子测绘带对应天线方位波束扫描速率。
[0092]
s60、根据每个子测绘带的波束中心下视角θi、飞机到虚拟旋转点的距离和天线方位向波束扫描速率控制搭载于飞机上的雷达在每个子测绘带上进行交替扫描;其中,每个子测绘带扫描时在距离向采用改进的scansar扫描模式、方位向采用tops扫描模式;改进的scansar扫描模式扫描时,一个发射脉冲照射一个子测绘带。
[0093]
具体而言,经过上述s20~s50,确定了构建的几何场景模型下的子测绘带数,以及计算得到了每个子测绘带的波束中心下视角θi、飞机到虚拟旋转点的距离和天线方位向波束扫描速率这几个至关重要的扫描控制参数,雷达搭载于飞机上,在这些扫描控制参数的作用下,在每个子测绘带上进行交替扫描。交替扫描时在距离向采用改进的scansar扫描模式、方位向采用tops扫描模式,可见,本发明实施例在距离向和方位向采用了不同的扫描模式,实现了tops扫描模式和改进的scansar扫描模式的有效结合,tops扫描模式扫描方向为从后向前扫描,改进的scansar扫描模式在一个合成孔径时间内交替照射子测绘带,一个发射脉冲照射一个子测绘带,具体比如:第一个发射脉冲指向第一子测绘带,第二个发射脉冲指向第二子测绘带,第三个发射脉冲指向第三子测绘带,
……
,第n个发射脉冲指向第n子测绘带,第n+1个发射脉冲指向第一个子测绘带,以此类推,交替照射实现整个成像场景的扫描。
[0094]
经发明人研究发现,本发明实施例中改进的scansar扫描模式中发射脉冲对成像效果影响很大,为了保证无模糊扫描成像,本发明实施例提出了一种计算每个子测绘带的发射脉冲重复频率的方式,该发射脉冲重复频率用于保证无模糊扫描成像。发射脉冲重复频率的选择受方位模糊与距离模糊的限制,则对应计算每个子测绘带的发射脉冲重复频率,可以包括:
[0095]
s601、根据雷达的多普勒带宽计算最小发射脉冲重复频率,公式表示为:
[0096]
prf
min
≥bdꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0097]
其中,bd表示雷达的多普勒带宽。
[0098]
公式(12)选择的最小发射脉冲重复频率可以避免对应子测绘带的方位向模糊。
[0099]
s602、根据飞机到最远端子测绘带的中心斜距计算对应的最大发射脉冲重复频率,公式表示为:
[0100][0101]
其中,c表示光速,r
max
表示飞机到最远端子测绘带的中心斜距。r
max
计算方式同不同的是,这里r
max
计算的最远端子测绘带对应的中心斜距。
[0102]
公式(13)选择的最大发射脉冲重复频率可以避免对应子测绘带的距离向模糊。
[0103]
s603、根据最小发射脉冲重复频率prf
min
和最大发射脉冲重复频率prf
max
确定每个子测绘带的发射脉冲重复频率,公式表示为:
[0104][0105]
其中,prf
set
表示从最小发射脉冲重复频率prf
min
和最大发射脉冲重复频率prf
max
确定的范围中任意选择的一发射脉冲重复频率。
[0106]
根据公式(14)计算得到发射于每个子测绘带的发射脉冲重复频率,以确保扫描成像的的有效性。
[0107]
为了验证本发明实施例提供的对大幅宽区域快速成像的sar二维波束扫描方法的有效性,进行以下实验进行验证。
[0108]
1.实验仿真参数
[0109]
本发明实施例仿真过程中的sar系统参数如表1所示。
[0110]
表1sar系统仿真参数表
[0111]
飞机高度h(km)20飞机飞行速度vs(m/s)90距离向成像场景近端地距x0(km)50tops方位分辨率ρ
a-tops
(m)3发射信号载频(ghz)8.65天线方位向波束宽度θa(
°
)2.2成像场景幅宽wa×
wg(km)60
×
60天线俯仰向波束宽度θf(
°
)8.9
[0112]
2.仿真内容和结果分析
[0113]
在sar系统仿真参数表所示的仿真条件下,通过本发明所提方法进行相关参数计算如下:
[0114]
根据天线运动情况,天线扫描至最远端子测绘带时波束中心下视角变化范围故子测绘带的个数飞机飞行速度vs为90m/s,最小发射脉冲重复频率prf
min
为1386hz,最大发射脉冲重复频率prf
max
为1606hz,则从[1386,1606]范围中选择1400hz作为4个子测绘带的发射脉冲重复频率prf
set
,此时对于4个子测绘带来说,每个子测绘带发射脉冲重复频率prf为350hz;条带模式的分辨率tops扫描模式的分辨率ρ
a-tops
=3,距离向成像场景近端地距x0是7.29km,故可得第1个子测绘带的波束中心下视角θ1为49.13
°
,中心斜距为30.90km,飞机
到虚拟旋转点的距离为5.47km;第2个子测绘带的波束中心下视角θ2为56.10
°
,中心斜距为36.18km,飞机到虚拟旋转点的距离为6.41km;第3个子测绘带的波束中心下视角θ3为63.13
°
,中心斜距为45.38km,飞机到虚拟旋转点的距离为8.04km;第4个子测绘带的波束中心下视角θ4为71.61
°
,中心斜距为67.23km,飞机到虚拟旋转机飞行距离为11.90km;飞机飞行距离为故每个子测绘带的成像时间为
[0115]
为了验证本发明提供的对大幅宽区域快速成像的sar二维波束扫描方法的优势,同样采用上述表1所示的sar系统仿真参数进行仿真,对应仿真结果如下:
[0116]
当雷达成像模式只为传统scansar扫描模式时,扫描成像时间为:
[0117]
当雷达成像模式只为tops扫描模式时,扫描成像时间为:t
tops
=4t=401.16s;其中,t为本发明提出方法的扫描成像时间。
[0118]
可见,本发明实施例提出的对大幅宽区域快速成像的sar二维波束扫描方法,对相同的幅宽区域,其成像时间最短。反之,在相同成像时间内,本发明实施例可以实现更大幅宽区域的成像。本发明实施例更适用于大幅宽区域的快速成像领域。
[0119]
综上所述,本发明实施例提出的对大幅宽区域快速成像的sar二维波束扫描方法,是一种新的扫描方法,通过构建几何场景模型,并根据几何场景模型设计扫描时的关键参数,包括子测绘带数,以及每个子测绘带的波束中心下视角、飞机到虚拟旋转点的距离和天线方位向波束扫描速率,通过这些参数控制搭载于飞机上的雷达在每个子测绘带上进行交替扫描,每个子测绘带扫描时在距离向采用改进的scansar扫描模式、方位向采用tops扫描模式,且改进的scansar扫描模式在扫描时,一个发射脉冲照射一个子测绘带。本发明实施例提出的扫描方法相对于只是用tops扫描模式,实现了在相同时间内对距离向宽测绘带的快速扫描成像,相对于传统scansar扫描模式,实现了在相同时间内对方位向宽测绘带的快速扫描成像。因此,在指定的距离向和方位向测绘带宽内,本发明实施例提出的扫描方法所用的成像时间比单独采用tops扫描模式或传统scansar扫描模式都少,能够实现快速成像。
[0120]
请参见图4,本发明实施例提供了一种电子设备,包括处理器401、通信接口402、存储器403和通信总线404,其中,处理器401、通信接口402、存储器403通过通信总线404完成相互的通信;
[0121]
存储器403,用于存放计算机程序;
[0122]
处理器401,用于执行存储器403上所存放的程序时,实现上述对大幅宽区域快速成像的sar二维波束扫描方法的步骤。
[0123]
本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述对大幅宽区域快速成像的sar二维波束扫描方法的步骤。
[0124]
对于装置/电子设备/存储介质实施例而言,由于其基本相近于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
[0125]
在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0126]
尽管在此结合各实施例对本技术进行了描述,然而,在实施所要求保护的本技术过程中,本领域技术人员通过查看所述附图、公开内容、以及所附权利要求书,可理解并实现所述公开实施例的其他变化。在权利要求中,“包括”(comprising)一词不排除其他组成部分或步骤,“一”或“一个”不排除多个的情况。单个处理器或其他单元可以实现权利要求中列举的若干项功能。相互不同的从属权利要求中记载了某些措施,但这并不表示这些措施不能组合起来产生良好的效果。
[0127]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1