基于能量轨迹提取的高价值目标散射中心参数估计方法
1.本发明属于合成孔径雷达(synthetic aperture radar,sar)参数估计技术领域,具体涉及一种基于能量轨迹提取的高价值目标散射中心参数估计方法。
背景技术:
2.合成孔径雷达是一种具有全天时、全天候、远距离等特点的高分辨微波主动成像雷达。随着对合成孔径雷达成像分辨能力的要求不断提高,发射信号的带宽也随之增大,此时高价值目标的电磁散射频率特性可以从回波中得到准确估计。研究表明,波段在光学区的雷达目标回波可以认为是若干个散射中心回波的相干叠加,而散射中心一般出现在目标的边缘,转角等具有明显几何特征的不连续部位,识别散射中心的类型对于目标检测与识别具有重大意义,因此需要建立宽带回波信号下的目标散射中心模型来反映目标回波的频率特性,以获取回波数据中的特征信息。
3.gtd(geometrical theory of diffraction,几何绕射理论)模型作为一种典型的散射中心模型,很适合雷达回波特性的研究。相比理想点散射模型,gtd模型将散射中心根据几何特征划分为五种不同的典型散射结构,并在回波模型中引入一项频率依赖项以描述不同结构散射体的电磁散射特性。
4.为了实现对gtd模型参数准确估计,“two-dimensional superresolution radar imaging using the music algorithm,ieee transactions on antennas and propagation,vol.42,no.10,pp.1386-13”与“two-dimensional esprit with tracking for radar imaging and feature extraction,ieee transactions on antennas and propagation,vol.52,no.2,pp.524-532,200”提出了基于music与esprit的方法来实现对gtd模型参数的估计,但这类基于谱估计的方法需要解决模型定阶与位置配对等问题。“the parameters estimation of hrrp based on compressive sensing,science technology and engineering,2014”提出了基于压缩感知理论的参数估计方法,克服了基于谱估计方法的局限性,不需要解决位置配对等问题,同时利用散射中心的稀疏特性大大提高了参数估计的性能,但面临计算量大,抗干扰性差且需要目标稀疏等局限性。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种能够降低对场景稀疏性的要求,降低字典矩阵的规模,运算处理复杂度低的基于能量轨迹提取的高价值目标散射中心参数估计方法。
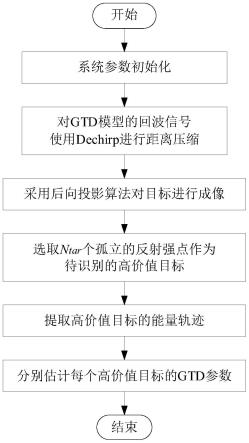
6.本发明的目的是通过以下技术方案来实现的:基于能量轨迹提取的高价值目标散射中心参数估计方法,包括以下步骤:
7.s1、系统参数初始化,初始化的参数包括发射信号载频f0,距离向采样频率fs,方位向采样频率prf,距离向采样点数l,目标观测时间ta,方位向采样点数k;
8.s2、对gtd模型的回波信号s
gtd
(f
τ
,η)使用dechirp进行距离压缩,得到距离压缩后
的信号
9.s3、采用后向投影算法对目标进行成像;
10.s4、选取n
tar
个孤立的反射强点作为待识别的高价值目标
11.s5、提取高价值目标的能量轨迹;
12.s6、分别估计每个高价值目标的gtd参数。
13.进一步地,所述步骤s2具体步骤如下:
14.s21、回波录取:将载机平台的位置pos(η)设为pos(η)=[x(η),y(η),z(η)],对目标场景内的第n个点(xn,yn,zn),距离历史表示为:
[0015][0016]
若共有n个目标,则成像场景整体的gtd回波模型s
gtd
(f
τ
,η)表示为:
[0017][0018]
kr为信号调频率,c是光速,f
τ
为距离频率,σn与αn分别为第n个目标的反射强度与gtd参数;利用驻定相位原理(posp)得到二位时域表达式为:
[0019][0020]
τ为距离向时间变量,η为方位时间变量;令
[0021][0022]
则二维时域表达式表示为:
[0023][0024]
其中,方位时间变量η的范围为:
[0025]
η=[-m/2:m/2]/prf
[0026]
快时间变量τ的范围为:
[0027]
τ=[-l/2:l/2]/fs;
[0028]
s22、进行距离向脉冲压缩:采用dechirp进行距离压缩,将回波s
gtd
(τ,η)与参考信号s
ref
(τ)进行相关处理,得到距离向脉冲压缩后的结果
[0029][0030]
式中fft
τ
{}表示做距离向fft;参考信号s
ref
(τ)为:
[0031][0032]rref
为参考距离;h
rvp
(f
τ
)为dechirp后产生的剩余视频相位项rvp项的补偿信号,表示为:
[0033][0034]
考虑噪声对回波的影响,将回波表示为:
[0035][0036]
nd为经过dechirp后的高斯噪声;
[0037]
根据dechirp定标公式
[0038][0039]
将回波g(f
τ
,η)转为由斜距r
δn
与方位时间变量η表示,即g(r
δn
,η),其中
[0040]rδ
∈(r
min-r
ref
,r
max-r
ref
),r
min
与r
max
分别表示目标场景至载机平台的最近与最远距离。
[0041]
进一步地,所述步骤s3具体步骤如下:
[0042]
s31、初始化后向投影成像空间,将成像空间划分为n
x
×
ny个像素单元;
[0043]
s32、计算各个网格像素点与雷达在不同方位时刻下的距离历史,通过距离历史求出相对场景中心的距离差:在第m个方位时刻ηm,载机平台位置为pos(ηm)=[x(ηm),y(ηm),z(ηm)],像素点p(x
p
,y
p
,z
p
)的距离差r
m,p
为:
[0044][0045]
s33、对成像场景中的各个网格p
p
(x
p
,y
p
,z
p
),提取其对应徙动轨迹上的回波数据,利用s32得到的距离信息对提取出的数据沿轨迹做相位补偿,得到相位补偿因子为:
[0046][0047]
s34、对相位补偿后的回波数据进行相干叠加,得到bp成像结果:
[0048][0049]
进一步地,所述步骤s5具体步骤如下:
[0050]
s51、第n个高价值目标的位置表示为(x'n,y'n,z'n),根据载机的运动轨迹计算出第n个高价值目标的徙动轨迹:
[0051][0052]
经过dechirp后徙动轨迹表示为r'
δn
(η)=r'n(η)-r
ref
,在r'n(η)附近搜索目标的能量轨迹
[0053]
s52、初始化参数,初始化迭代次数n=1、搜索范围δr;
[0054]
s53、确定第n个高价值目标能量轨迹的搜索边界令m=0;
[0055]
s54、在第m个方位时刻,边界内根据最大snr准则进行搜索,具体表达式为:
[0056][0057]
式中表示第n个高价值目标在第m个方位时刻具有最大信噪比的距离单元对应的距离;
[0058]
s55、基于遍历完所有方位时刻作为迭代终止判定,如果m=m,第n个高价值目标的能量轨迹搜索完毕,其能量轨迹表示为进入s56;反之,m=m+1,返回s54;
[0059]
s56、如果n=n
tar
,所有目标的能量轨迹搜索完毕,结束操作;反之,n=n+1,返回s53。
[0060]
进一步地,所述步骤s6具体步骤如下:
[0061]
s61、初始化迭代参数n=1;
[0062]
s62、提取第n个高价值目标的能量轨迹上的回波信息,第m个方位时刻提取的回波表示为遍历m个方位时刻得到第n个高价值目标能量轨迹上的所有回波tn,其维度为m
×
1;
[0063]
依照回波模型与距离向dechirp的公式构建字典,第m个方位时刻的字典表示为:
[0064][0065]
式中α∈{-1,-0.5,0,0.5,1},对应gtd模型的五种类型参数;对于其中一个类型,所有m个方位时刻构成了维度为m
×
1的字典ψn(α);
[0066]
s63、以最小残差作为估计准则,构建估计gtd模型参数的目标函数
[0067][0068]
s64、如果n=n
tar
,输出各个目标的gtd模型参数,得到最终结果;反之,n=n+1,返回s62。
[0069]
本发明的有益效果是:本发明根据gtd模型的sar回波信号的特点,提出了一种基于能量轨迹提取的高价值目标散射中心参数估计方法,通过先对回波数据进行bp成像,确定了待估计的高价值目标的数量与位置;通过对高价值目标能量轨迹的搜索,来提取高价值目标能量轨迹上对应的回波信息;在获得能量轨迹上的回波信息后,构建字典矩阵与目标函数,估计目标对应的gtd参数。相比基于压缩感知的估计方法,降低了对场景稀疏性的要求,降低了字典矩阵的规模,运算处理复杂度低。
附图说明
[0070]
图1为本发明的sar目标散射中心参数估计方法程图;
[0071]
图2为本发明的sar成像几何构型;
[0072]
图3为能量轨迹提取示意图;
[0073]
图4为基于本发明方法对表2各点gtd参数的目标函数估计结果图;
[0074]
图5为基于本发明方法对表2各点的成像结果与gtd参数估计结果示意图。
具体实施方式
[0075]
下面结合附图进一步说明本发明的技术方案。
[0076]
如图1所示,本发明的一种基于能量轨迹提取的高价值目标散射中心参数估计方法,包括以下步骤:
[0077]
s1、系统参数初始化,初始化的参数包括发射信号载频f0,距离向采样频率fs,方位向采样频率prf,距离向采样点数l,目标观测时间ta,方位向采样点数k;具体初始化参数如表1所示;
[0078]
表1
[0079]
平台速度(v)100m/s中心时刻平台位置(r0)(700,0,300)载频(f0)9.6ghz发射信号带宽(br)1ghz发射信号脉冲宽度(tr)1.5μs距离向采样频率(fs)500mhz距离向采样点数(l)4096合成孔径时间(ts)1s脉冲重复频率(prf)2048hz方位向采样点数(m)2048高价值目标数目(n
tar
)5
[0080]
本实施方式中sar成像几何构型如图2所示,假定场景中有五个点目标,其分布以及参数如表2所示,其中目标1为场景中心位置。
[0081]
表2
[0082] 目标点位置(m)散射中心参数(σ,α)1(-12,10,0)(5,0.5)2(-4,4,0)(1.5,0)3(0,-4,0)(4,-1)4(9,4,0)(3,1)5(11,-11,0)(2,-0.5)
[0083]
s2、对gtd模型的回波信号s
gtd
(f
τ
,η)使用dechirp进行距离压缩,得到距离压缩后的信号具体步骤如下:
[0084]
s21、回波录取:将载机平台的位置pos(η)设为pos(η)=[x(η),y(η),z(η)],对目标场景内的第n个点(xn,yn,zn),距离历史表示为:
[0085][0086]
若共有n个目标,则成像场景整体的gtd回波模型s
gtd
(f
τ
,η)表示为:
[0087][0088]
kr为信号调频率,c是光速,f
τ
为距离频率,σn与αn分别为第n个目标的反射强度与
gtd参数;利用驻定相位原理(posp)得到二位时域表达式为:
[0089][0090]
τ为距离向时间变量,η为方位时间变量;令
[0091][0092]
则二维时域表达式表示为:
[0093][0094]
其中,方位时间变量η的范围为:
[0095]
η=[-m/2:m/2]/prf
[0096]
=[-0.5:0.5]s
[0097]
快时间变量τ的范围为:
[0098][0099]
s22、进行距离向脉冲压缩:采用dechirp进行距离压缩,将回波s
gtd
(τ,η)与参考信号s
ref
(τ)进行相关处理,得到距离向脉冲压缩后的结果
[0100][0101]
式中fft
τ
{}表示做距离向fft;参考信号s
ref
(τ)为:
[0102][0103]rref
为参考距离;h
rvp
(f
τ
)为dechirp后产生的剩余视频相位项rvp项的补偿信号,表示为:
[0104][0105]
考虑噪声对回波的影响,将回波表示为:
[0106][0107]
nd为经过dechirp后的高斯噪声;
[0108]
根据dechirp定标公式
[0109][0110]
将回波g(f
τ
,η)转为由斜距r
δn
与方位时间变量η表示,即g(r
δn
,η),其中
[0111]rδ
∈(r
min-r
ref
,r
max-r
ref
),r
min
与r
max
分别表示目标场景至载机平台的最近与最远距离。
[0112]
s3、采用后向投影算法(backprojection)对目标进行成像;具体步骤如下:
[0113]
s31、初始化后向投影成像空间,根据成像区域大小与分辨率对成像空间进行二维网格划分,将成像空间划分为n
x
×
ny个像素单元,为了使相邻两个点目标能被区分,网格间隔应略小于分辨率要求;
[0114]
s32、计算各个网格像素点与雷达在不同方位时刻下的距离历史,通过距离历史求出相对场景中心的距离差:在第m个方位时刻ηm,载机平台位置为pos(ηm)=[x(ηm),y(ηm),z(ηm)],像素点p(x
p
,y
p
,z
p
)的距离差r
m,p
为:
[0115][0116]
s33、对成像场景中的各个网格p
p
(x
p
,y
p
,z
p
),提取其对应徙动轨迹上的回波数据,利用s32得到的距离信息对提取出的数据沿轨迹做相位补偿,得到相位补偿因子为:
[0117][0118]
s34、对相位补偿后的回波数据进行相干叠加,得到bp成像结果:
[0119][0120]
s4、波段在光学区的雷达目标回波可以认为是若干个散射中心回波的相干叠加,而散射中心一般出现在目标的边缘,转角等具有明显几何特征的不连续部位,对应了目标成像结果中存在的孤立反射强点,对这些强点的识别对于目标检测有重大意义。因此,在bp成像后选取n
tar
个孤立的反射强点作为待识别的高价值目标;
[0121]
s5、提取高价值目标的能量轨迹;如图3所示,具体方法为:
[0122]
s51、第n个高价值目标的位置表示为(x'n,y'n,z'n),根据载机的运动轨迹计算出第n个高价值目标的徙动轨迹:
[0123][0124]
经过dechirp后徙动轨迹表示为r'
δn
(η)=r'n(η)-r
ref
,当高价值目标的位置信息不够准确或者载机平台存在运动误差时,计算出的徙动轨迹r'
δn
(η)与实际距离历史r
δn
(η)间存在误差以至于不能将其作为目标的能量轨迹,因此需要在r'
δn
(η)附近搜索目标的能量轨迹
[0125]
s52、初始化参数,初始化迭代次数n=1、搜索范围δr;
[0126]
s53、确定第n个高价值目标能量轨迹的搜索边界令m=0;
[0127]
s54、在第m个方位时刻,边界内根据最大snr准则进行搜索,具体表达式为:
[0128][0129]
式中表示第n个高价值目标在第m个
方位时刻具有最大信噪比的距离单元对应的距离;
[0130]
s55、基于遍历完所有方位时刻作为迭代终止判定,如果m=m,第n个高价值目标的能量轨迹搜索完毕,其能量轨迹表示为进入s56;反之,m=m+1,返回s54;
[0131]
s56、如果n=n
tar
,所有目标的能量轨迹搜索完毕,结束操作;反之,n=n+1,返回s53。
[0132]
s6、分别估计每个高价值目标的gtd参数;具体步骤如下:
[0133]
s61、初始化迭代参数n=1;
[0134]
s62、提取第n个高价值目标的能量轨迹上的回波信息,第m个方位时刻提取的回波表示为遍历m个方位时刻得到第n个高价值目标能量轨迹上的所有回波tn,其维度为m
×
1;
[0135]
依照回波模型与距离向dechirp的公式构建字典,第m个方位时刻的字典表示为:
[0136][0137]
式中α∈{-1,-0.5,0,0.5,1},对应gtd模型的五种类型参数;对于其中一个类型,所有m个方位时刻构成了维度为m
×
1的字典ψn(α);
[0138]
s63、以最小残差作为估计准则,构建估计gtd模型参数的目标函数
[0139][0140]
s64、如果n=n
tar
,输出各个目标的gtd模型参数,得到最终结果;反之,n=n+1,返回s62。
[0141]
仿真结果如图4和图5所示,图4为基于本发明方法对表2各点gtd参数的目标函数估计结果图;图5为基于本发明方法对表2各点的成像结果与gtd参数估计结果示意图。由图4可知,目标gtd参数可以在信号残差最小时获得。由图5与表2对比可知,通过提取能量轨迹可以实现对目标gtd参数的正确估计,相比基于压缩感知方法对成像场景严格的稀疏性要求,本方法只需保证能量轨迹提取时的稀疏性,同时本方法降低了字典矩阵的规模,提升了运算效率。
[0142]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1