一种基于探地雷达技术的城市行道树根系检测方法
1.本发明属于树木根系探测技术领域,具体涉及一种基于探地雷达技术的城市行道树根系检测方法。
背景技术:
2.探地雷达是研究超高频短脉冲电磁波在地下介质中传播规律的一种地球物理探测方法,波在介质中传播遇到不良地质体界面将产生反射,电磁波在界面突变处会产生振幅、相位、频率变化。探地雷达系统(ground-penetrating radar,简称6pr)由操控电脑、雷达控制单元及雷达天线组成,根据雷达天线的频率不同,探测深度及最小探测根径大小也有所不同,一般能探测到树木5mm以上的粗根,由于土壤与根系之间存在介电常数的差异,雷达天线发射的电磁波会在两者交界处发生反射,获得的反射波形呈现光滑的双曲线形状,从而能够以此识别出树木根系的位置。
3.随着城市建设的快速推进,如地铁扩张、道路整修、树木移栽等,行道树的立地条件也直接或间接地受到了影响,为了分析行道树根系健康状况与地上部生长状况、生长环境、土壤状况的关系,探讨道路空间状况对根系健康的影响,需要使用探地雷达技术检测行道树地下粗根,而行道树根系的检测存在一些问题,城市道路的硬质铺装层会减弱下层区域根系的反射信号,这种降低作用会随着道路硬质铺装层厚度增加而增加;道路地下空间状况复杂,介质不均一,信号干扰因素较多,如碎石层、砖块、回填的建筑垃圾、管线、钢筋网都会产生波形,干扰根系信号的判读。
技术实现要素:
4.技术问题:针对现有技术中存在的上述问题,本发明所要解决的技术问题在于提供一种基于探地雷达技术的城市行道树根系检测方法。
5.技术方案:为了解决上述技术问题,本发明采用的技术方案如下:
6.一种基于探地雷达技术的城市行道树根系检测方法,包括以下步骤:
7.s1、利用第一探地雷达对行道树根系采用圆周扫描法进行圆周扫描;
8.s2、圆周扫描后利用第一探地雷达软件对行道树根系进行粗根探测点定位,得到粗根数量及分布位置信息;
9.s3、利用第二探地雷达对行道树根系采用网格扫描法进行直线扫描;
10.s4、直线扫描后利用第二探地雷达软件在现场扫描结束即时生成深度切片,得到不同深度层次的粗根分布;
11.s5、将第一探地雷达和第二探地雷的粗根分布结果比对,确认行道树根系的分布。
12.进一步的,所述步骤s1中圆周扫描法具体包括以下步骤:
13.s1.1、围绕待测量的行道树的树干在地面绘制多条等间距的同心圆扫描线,最外圈扫描线直径为2.5~4m;
14.s1.2、将第一探地雷达的天线沿所述扫描线扫描;
15.s1.3、获取每条扫描线正下方的行道树根系的第一探地雷达数据。
16.进一步的,所述步骤s3中网格扫描法具体包括以下步骤:
17.s3.1、在行道树的树干旁地面,沿x轴绘制多条等间距的第一平行直线;
18.s3.2、在行道树的树干旁地面,沿y轴绘制多条等间距的第二平行直线;多条第二平行直线与多条第一平行直线组成网格;
19.s3.3、将第二探地雷达的天线沿多个第二平行直线逐个单程扫描;
20.s3.4、获取网格正下方的行道树根系的第二探地雷达数据。
21.进一步的,所述多条同心圆扫描线间距为10-20cm。
22.进一步的,所述多条第一平行直线间距10-20cm,第一平行直线长度≤10m,所述多条第二平行直线间距10-20cm,第二平行直线长度≤4m。
23.进一步的,所述第一探地雷达选用ltd2600探地雷达,第一探地雷达采用配套的idsp7软件进行扫描图像分析,对扫描图像初步处理及粗根探测点定位,得到粗根数量及分布位置信息后通过matlab软件分析及绘制粗根分布图和粗根分布密度图。
24.进一步的,所述第二探地雷达选用noggin1000探地雷达,在现场扫描结束即时生成深度切片,扫描数据可通过usb数据转换后导入配套软件ekko_project进行滤波、背景消除处理,从而形成三维切片图,运用voxler软件绘制网格的道路地下空间三维图,判读道路铺装层次厚度,地下管线、钢筋网的存在及其位置;将粗根分布图和粗根分布密度图与三维切片图对比,找到根系分布位置。
25.有益效果:与现有技术相比,本发明具有以下优点:1、通过使用两种不同分辨率的探地雷达进行了地下根系的检测,一个探地雷达使用圆周扫描法,另一个使用网格扫描法,将扫描的根系分布点与地下三维切片相结合,使检测结果更加精确,更有说服力;2、两种探地雷达结合使用,排除地下钢筋网以及管道产生的干扰,适应在复杂的城市道路环境中使用。
附图说明
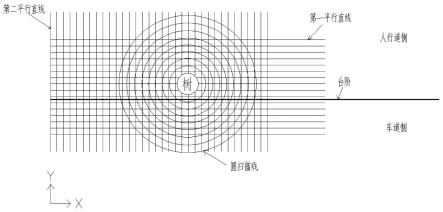
26.图1是本发明实施例同心圆扫描线和网格扫描直线的分布示意图;
27.图2是ltd2600探地雷达进行圆周扫描图像示意图;
28.图3是noggin1000探地雷达配套软件ekko_project三维切片图;
29.图4是noggin1000探地雷达扫描到7.7cm粗管道扫描结果示意图;
30.图5是noggin1000探地雷达扫描到3.3cm粗管道扫描结果示意图;
31.图6是;中山南路zsnl(e)161法桐使用noggin1000探地雷达扫描的深度切片图;
32.图7是中山南路zsnl(e)161法桐人行道道路断面不同深度地下空间切片图;
33.图8是中山南路zsnl(e)161法桐人行道道路断面地下空间三维构造图;
34.图9是中山南路zsnl(e)161法桐根系大致的粗根分布图;
35.图10是中山南路zsnl(e)161法桐根系大致的粗根分布密度图。
具体实施方式
36.下面结合具体实施例,进一步阐明本发明,实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
37.以检测南京市中山南路zsnl(e)161法桐为例,该法桐位于中山南路北段东侧,树高17米,胸径33cm,东西冠幅8.2米,南北冠幅8.3米,冠长10米,长势偏弱。树干有一处损伤,损伤部位长度占树体周长的10%,枝叶茂密度中等,存在轻度的病虫害,出现部分裸根现象,裸根面积为0.04m2。该法桐综合健康等级评价为3级,即亚健康状态。该法桐树池宽度为1.5米,铺有鹅卵石,该法桐所处人行道为大尺寸面砖铺设道路类型,面砖下可能是水泥垫层。本发明提出的基于探地雷达技术的城市行道树根系检测方法,包括以下步骤:
38.s1、利用第一探地雷达对行道树根系采用圆周扫描法进行圆周扫描,包括步骤s1.1至步骤s1.3:
39.s1.1、围绕该行道树的树干在地面绘制多条等间距的同心圆扫描线,最外圈扫描线直径为4m。
40.如图1所示,以zsnl(e)161法桐的树干为圆心,同心圆扫描线间距设置为20cm,由于人行道侧和车道侧有台阶,圆以台阶为分界线分隔成两个圆弧,误差可忽略不计。
41.s1.2、将第一探地雷达的天线沿所述扫描线扫描。
42.拖动第一探地雷达的天线,沿扫描线绕树扫描,第一探地雷达采用ltd-2600型智能化探地雷达,ltd-2600探地雷达由一体化主机、天线及相关配件组成,天线采用900m屏蔽天线。
43.s1.3、获取每条扫描线正下方的行道树根系的第一探地雷达数据。
44.雷达工作时,向地下介质发射高频电磁脉冲(九百兆赫),电磁脉冲遇到不同电性介质的分界面时即产生反射或散射,探地雷达接收并记录这些信号。
45.s2、圆周扫描后利用第一探地雷达软件对行道树根系进行粗根探测点定位,得到粗根数量及分布位置信息。
46.所有扫描线扫描结束后,通过ltd-2600探地雷达配套的idsp7软件进行扫描图像分析,软件可进行调零、数字滤波、背景消除等多方面的前期处理,有利于根系点位的识别,采用此数据软件进行扫描图像初步处理及粗根探测点定位,如图2所示,zsnl(e)161法桐的一个圆扫描线扫描后得到扫描图像,得到粗根数量及分布位置信息后通过matlab软件分析及绘制粗根分布图和粗根分布密度图等,如图9所示,zsnl(e)161法桐根系大致的粗根分布图,如图10所示,zsnl(e)161法桐根系大致的粗根分布密度图,zsnl(e)161法桐距树干1-3米水平范围内根系扫描点平均密度为0.20个/米,人行道一侧根系扫描点分布平均密度为0.22个/米,高于车道一侧根系扫描点分布平均密度(0.18个/米)。从垂直分布状况来看,检测到的根系较多分布于20-40cm的深度范围。
47.s3、利用第二探地雷达对行道树根系采用网格扫描法进行直线扫描,包括步骤s3.1至步骤s3.4:
48.s3.1、在行道树的树干旁地面,沿x轴绘制多条等间距的第一平行直线。
49.如图1所示,在zsnl(e)161法桐的树干两侧沿x轴绘制多条间距为10cm的第一平行直线(图中仅画出部分第一平行直线),第一平行直线长度为8m,树干处在第一条第一平行直线的中心位置。
50.s3.2、在行道树的树干旁地面,沿y轴绘制多条等间距的第二平行直线;多条第二平行直线与多条第一平行直线组成网格。
51.在zsnl(e)161法桐的树干两侧沿y轴绘制多条间距为10cm的第二平行直线(图中
仅画出部分第二平行直线),第二平行直线垂直于第一平行直线,第二平行直线长度为4m。
52.s3.3、将第二探地雷达的天线沿多个第二平行直线逐个单程扫描。
53.拖动第二探地雷达的天线沿第二平行直线从上到下单程扫描,第一平行直线用作距离测量,雷达经过时自动识别,确定雷达位置,第二探地雷达采用noggin1000探地雷达,它由数字视频记录器、天线、拖拽单轮以及相关配件组成。基本工作原理与ltd-2600探地雷达相同。noggin1000探地雷达具有频带宽、探测范围广、适应能力强、抗干扰能力强等特点,数字视频记录器功能强大,数据采集简单。
54.s3.4、获取网格正下方的行道树根系的第二探地雷达数据。
55.雷达工作时,向地下介质发射高频电磁脉冲(一千兆赫),电磁脉冲遇到不同电性介质的分界面时即产生反射或散射,探地雷达接收并记录这些信号。
56.s4、直线扫描后利用第二探地雷达软件在现场扫描结束即时生成深度切片,得到不同深度层次的粗根分布。
57.noggin1000探地雷达,在现场扫描结束即时生成深度切片,从深度切片图中可得到不同深度层次的粗根分布,如图3所示,zsnl(e)161法桐人行道一侧的某条第一平行直线深度切片。
58.s5、将第一探地雷达和第二探地雷的粗根分布结果比对,确认行道树根系的分布。
59.noggin1000探地雷达,在现场扫描结束即时生成深度切片(如图6所示),探地雷达扫描到管道图,信号极为明显,但不同的管道内部构造不同,可能出现不同的波形;此次扫描到的两种管道的波形(如图4和图5所示),一种为亮度极亮的叠次波且振幅较大的形式(7.7cm粗管道扫描结果),一种则为亮度较亮但振幅较小,整体波形较宽的形式(3.3cm粗管道扫描结果);雷达的扫描图像中若波形出现亮度极高、叠次波、过宽的情况,有较大的可能是管道,在后期根系判定时可区分开来;扫描数据可通过usb数据转换后导入配套软件ekko_projiect进行滤波、背景消除处理,从而形成空间切片图(如图7所示),图7中,(a)~(i)是不同深度的人行道道路断面地下空间切片图,在(g)图深度0.28m时出现第一层钢筋网,在(j)图深度0.40m时出现第二层钢筋网,运用voxler软件绘制zsnl(e)161法桐的人行道道路地下空间三维图(如图8所示),判读道路铺装层次厚度,地下管线、钢筋网的存在及其位置(根据雷达公司各种介质信号的图片以及前期做的相应的图像验证实验结果);将粗根分布图和粗根分布密度图与三维切片图对比,找到人行道侧道路下的根系分布位置。在zsnl(e)161法桐的车道侧同样操作,找到车道侧道路下的根系分布位置,从而获得zsnl(e)161法桐根系的分布。
60.以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1