一种无人驾驶汽车环境感知与定位方法与流程
1.本发明涉及无人驾驶定位技术领域,具体为一种无人驾驶汽车环境感知与定位方法。
背景技术:
2.无人驾驶技术是传感器、计算机、导航定位、人工智能、通信、模式识别、智能控制、机器视觉等多门前沿学科的综合体。无人驾驶汽车又称自动驾驶汽车、电脑驾驶汽车或轮式移动机器人,其是一种通过电脑系统来实现无人驾驶的智能汽车。无人驾驶汽车依靠人工智能、雷达、视觉计算、监控组件和全球定位系统协同合作,使得电脑可在没有任何人类主动操作下,自动安全地操作机动车辆。
3.现有的无人驾驶汽车的定位方法,对准确位置的定位数据精度较差,例如在停车场或其他信号比较差的位置的定位效果较差,无法精确定位到无人驾驶汽车的准确位置。
技术实现要素:
4.本发明的目的在于提供一种无人驾驶汽车环境感知与定位方法,以解决上述背景技术中提出的问题。
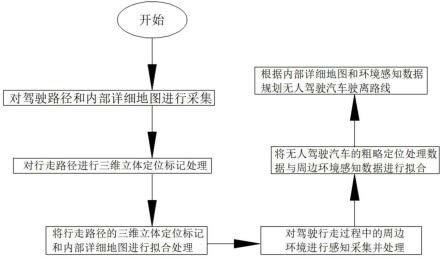
5.为了解决上述技术问题,本发明提供如下技术方案:一种无人驾驶汽车环境感知与定位方法,包括以下步骤:
6.s1、对无人驾驶汽车的驾驶行走路径进行采集处理,对信号比较差的位置进行内部详细地图检索提取处理;
7.s2、对行走路径进行三维立体定位标记处理;
8.s3、将行走路径的三维立体定位标记和内部详细地图进行拟合处理,实现对无人驾驶汽车的粗略定位处理;
9.s4、对驾驶行走过程中的周边环境进行感知采集并处理;
10.s5、将无人驾驶汽车的粗略定位处理数据与周边环境感知数据进行拟合,实现对无人驾驶汽车的精确定位处理;
11.s6、根据内部详细地图和环境感知数据规划无人驾驶汽车驶离路线。
12.进一步的,在步骤s2中,对内部详细地图进行分析处理,以内部详细地图为基准建立三维立体坐标系,以无人驾驶汽车进入内部详细地图的入口为三维立体坐标系的原点。
13.进一步的,在步骤s2中,将行走路径在三维立体坐标系中进行定位标记处理,无人驾驶汽车的定位坐标为(xi,yi,zi),无人驾驶汽车定位数据为ai、bi、ci、di;
14.ai为无人驾驶汽车在x,y平面上与坐标系原点的距离;
15.bi为无人驾驶汽车在x,y平面上与坐标系原点的偏移角度;
16.ci为无人驾驶汽车在三维立体坐标系中与坐标系原点的偏移角度;
17.di为无人驾驶汽车在三维立体坐标系中与坐标系原点的距离。
18.进一步的,在步骤s3中,将无人驾驶汽车的行走路径在三维立体坐标系中进行拟合处理,在三维立体坐标系中拟合出无人驾驶汽车的行走路线。
19.进一步的,在步骤s4中,对驾驶行走过程中的周边环境中的路标、障碍物、车位、车辆进行感知采集并对环境感知数据进行亮度和对比度调整处理,同时对环境感知数据进行定位标记处理,环境感知定位数据为(ej,fj,gj),环境感知定位数据为pj、qj、rj、sj;
20.pj为环境标记在x,y平面上与坐标系原点的距离;
21.qj为环境标记在x,y平面上与坐标系原点的偏移角度;
22.rj为环境标记在三维立体坐标系中与坐标系原点的偏移角度;
23.sj为环境标记在三维立体坐标系中与坐标系原点的距离。
24.进一步的,在步骤s5中,将周边环境感知数据的定位标记数据与内部详细地图进行拟合填充,对内部详细地图进行动态补充调整,实时更新内部详细地图的定位数据。
25.进一步的,在步骤s6中,无人驾驶汽车的驶离路线实时定位坐标为(xi,yi,zi);
26.定位坐标(xi,yi,zi)至少满足条件:或中的任意一个;
27.a={a1、a2、a3…ai
…an
};a为ai的集合;
28.b={b1、b2、b3…bi
…bn
};b为bi的集合;
29.c={c1、c2、c3…ci
…cn
};c为ci的集合;
30.d={d1、d2、d3…di
…dn
};d为di的集合;
31.p={p1、p2、p3…
pj…
pm};p为pj的集合;
32.q={q1、q2、q3…
qj…
qm};q为qj的集合;
33.r={r1、r2、r3…rj
…rm
};r为rj的集合;
34.s={s1、s2、s3…
sj…
sm};s为sj的集合;
35.当定位坐标(xi,yi,zi)满足条件:a∈p、b∈q、c∈r或d∈s中的任意三个,发出警示,重新规划路线。
36.进一步的,还包括无人驾驶汽车环境感知与定位系统,包括环境感知模块、定位管理模块、数据采集模块、数据整合模块、中央处理模块和警示模块;所述环境感知模块、定位管理模块、数据采集模块、数据整合模块、警示模块均分别与中央处理模块通信数据连接;所述环境感知模块用于对环境进行感知数据采集处理;所述定位管理模块用于对无人驾驶汽车进行定位处理;所述数据采集模块用于对无人驾驶汽车、内部详细地图和环境进行数据采集处理;所述数据整合模块用于对数据进行整合处理;所述中央处理模块用于对数据进行综合分析处理;所述警示模块用于在无人驾驶汽车定位数据发生异常时进行警示处理。
37.进一步的,所述环境感知模块包括环境识别单元、环境调整单元、环境标记单元;所述环境识别单元用于进行路标识别、障碍物识别、车位识别处理;所述环境调整单元用于对环境数据进行亮度调整和对比度调整;所述环境标记单元用于对环境数据进行定位标记
处理。
38.进一步的,所述定位管理模块包括定位拟合单元、粗略定位单元、精确定位单元;所述定位拟合单元用于对数据进行拟合处理;所述粗略定位单元用于对驾驶路线和内部详细地图进行拟合处理;所述精确定位单元用于对拟合后的定位数据和环境标记数据进行再次拟合处理。
39.与现有技术相比,本发明所达到的有益效果是:
40.1、本发明可对驾驶路径和停车场或其他信号比较差的位置内部详细地图进行采集,以无人驾驶汽车的行走路径进行三维立体定位标记处理,并配合内部详细地图进行拟合处理,进而实现对无人驾驶汽车进行粗略定位处理;可对内部详细地图中的环境进行实时数据采集并定位标记,将无人驾驶汽车的粗略定位数据和环境感知定位数据进行拟合处理,进一步细化无人驾驶汽车的定位信息;同时根据停车场内部地图和环境感知定位数据进行对比配合规划驶离路线;
41.2、本发明中的环境感知模块中的环境识别单元可实现路标识别、障碍物识别、车位识别;环境调整单元可实现对环境数据进行亮度调整和对比度调整;环境标记单元可实现对环境数据进行定位标记处理;定位管理模块中的定位拟合单元可实现对数据进行拟合处理;粗略定位单元可实现对驾驶路线和内部详细地图进行拟合处理,实现对无人驾驶汽车的粗略定位处理;将无人驾驶汽车的行走路径在三维立体坐标系中进行拟合处理,在三维立体坐标系中拟合出无人驾驶汽车的行走路线;精确定位单元可实现对拟合后的定位数据和环境标记数据进行再次拟合处理,实现对无人驾驶汽车的精确定位处理;将周边环境感知数据的定位标记数据与内部详细地图进行拟合填充,对内部详细地图进行动态补充调整,实时更新内部详细地图的定位数据。
附图说明
42.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
43.图1是本发明中整体的工作原理示意图;
44.图2是本发明中整体的模块连接示意图;
45.图3是本发明中环境感知模块的示意图;
46.图4是本发明中定位管理模块的示意图;
47.图中:1、环境感知模块;2、定位管理模块;3、数据采集模块;4、数据整合模块;5、中央处理模块;6、警示模块。
具体实施方式
48.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
49.如图1-图4所示的一种无人驾驶汽车环境感知与定位方法,包括以下步骤:
50.s1、对无人驾驶汽车的驾驶行走路径进行采集处理,对信号比较差的位置进行内
部详细地图检索提取处理;
51.s2、对行走路径进行三维立体定位标记处理;对内部详细地图进行分析处理,以内部详细地图为基准建立三维立体坐标系,以无人驾驶汽车进入内部详细地图的入口为三维立体坐标系的原点;
52.将行走路径在三维立体坐标系中进行定位标记处理,无人驾驶汽车的定位坐标为xi,yi,zi,无人驾驶汽车定位数据为ai、bi、ci、di;
53.ai为无人驾驶汽车在x,y平面上与坐标系原点的距离;
54.bi为无人驾驶汽车在x,y平面上与坐标系原点的偏移角度;
55.ci为无人驾驶汽车在三维立体坐标系中与坐标系原点的偏移角度;
56.di为无人驾驶汽车在三维立体坐标系中与坐标系原点的距离;
57.s3、将行走路径的三维立体定位标记和内部详细地图进行拟合处理,实现对无人驾驶汽车的粗略定位处理;将无人驾驶汽车的行走路径在三维立体坐标系中进行拟合处理,在三维立体坐标系中拟合出无人驾驶汽车的行走路线;
58.s4、对驾驶行走过程中的周边环境进行感知采集并处理;对驾驶行走过程中的周边环境中的路标、障碍物、车位、车辆进行感知采集并对环境感知数据进行亮度和对比度调整处理,同时对环境感知数据进行定位标记处理,环境感知定位数据为ej,fj,gj,环境感知定位数据为pj、qj、rj、sj;
59.pj为环境标记在x,y平面上与坐标系原点的距离;
60.qj为环境标记在x,y平面上与坐标系原点的偏移角度;
61.rj为环境标记在三维立体坐标系中与坐标系原点的偏移角度;
62.sj为环境标记在三维立体坐标系中与坐标系原点的距离;
63.s5、将无人驾驶汽车的粗略定位处理数据与周边环境感知数据进行拟合,实现对无人驾驶汽车的精确定位处理;将周边环境感知数据的定位标记数据与内部详细地图进行拟合填充,对内部详细地图进行动态补充调整,实时更新内部详细地图的定位数据;
64.s6、根据内部详细地图和环境感知数据规划无人驾驶汽车驶离路线;无人驾驶汽车的驶离路线实时定位坐标为xi,yi,zi;
65.定位坐标xi,yi,zi至少满足条件:或中的任意一个;
66.a={a1、a2、a3…ai
…an
};a为ai的集合;
67.b={b1、b2、b3…bi
…bn
};b为bi的集合;
68.c={c1、c2、c3…ci
…cn
};c为ci的集合;
69.d={d1、d2、d3…di
…dn
};d为di的集合;
70.p={p1、p2、p3…
pj…
pm};p为pj的集合;
71.q={q1、q2、q3…
qj…
qm};q为qj的集合;
72.r={r1、r2、r3…rj
…rm
};r为rj的集合;
73.s={s1、s2、s3…
sj…
sm};s为sj的集合;
74.当定位坐标xi,yi,zi满足条件:a∈p、b∈q、c∈r或d∈s中的任意三个,发出警示,重新规划路线。
75.还包括无人驾驶汽车环境感知与定位系统,包括环境感知模块1、定位管理模块2、数据采集模块3、数据整合模块4、中央处理模块5和警示模块6;所述环境感知模块1、定位管理模块2、数据采集模块3、数据整合模块4、警示模块6均分别与中央处理模块5通信数据连接;所述环境感知模块1用于对环境进行感知数据采集处理;所述定位管理模块2用于对无人驾驶汽车进行定位处理;所述数据采集模块3用于对无人驾驶汽车、内部详细地图和环境进行数据采集处理;所述数据整合模块4用于对数据进行整合处理;所述中央处理模块5用于对数据进行综合分析处理;所述警示模块6用于在无人驾驶汽车定位数据发生异常时进行警示处理;所述环境感知模块1包括环境识别单元、环境调整单元、环境标记单元;所述环境识别单元用于进行路标识别、障碍物识别、车位识别处理;所述环境调整单元用于对环境数据进行亮度调整和对比度调整;所述环境标记单元用于对环境数据进行定位标记处理;所述定位管理模块2包括定位拟合单元、粗略定位单元、精确定位单元;所述定位拟合单元用于对数据进行拟合处理;所述粗略定位单元用于对驾驶路线和内部详细地图进行拟合处理;所述精确定位单元用于对拟合后的定位数据和环境标记数据进行再次拟合处理。
76.本发明的有益效果是:
77.本发明可对驾驶路径和停车场或其他信号比较差的位置内部详细地图进行采集,以无人驾驶汽车的行走路径进行三维立体定位标记处理,并配合内部详细地图进行拟合处理,进而实现对无人驾驶汽车进行粗略定位处理;可对内部详细地图中的环境进行实时数据采集并定位标记,将无人驾驶汽车的粗略定位数据和环境感知定位数据进行拟合处理,进一步细化无人驾驶汽车的定位信息;同时根据停车场内部地图和环境感知定位数据进行对比配合规划驶离路线;环境感知模块1中的环境识别单元可实现路标识别、障碍物识别、车位识别;环境调整单元可实现对环境数据进行亮度调整和对比度调整;环境标记单元可实现对环境数据进行定位标记处理;定位管理模块2中的定位拟合单元可实现对数据进行拟合处理;粗略定位单元可实现对驾驶路线和内部详细地图进行拟合处理,实现对无人驾驶汽车的粗略定位处理;将无人驾驶汽车的行走路径在三维立体坐标系中进行拟合处理,在三维立体坐标系中拟合出无人驾驶汽车的行走路线;精确定位单元可实现对拟合后的定位数据和环境标记数据进行再次拟合处理,实现对无人驾驶汽车的精确定位处理;将周边环境感知数据的定位标记数据与内部详细地图进行拟合填充,对内部详细地图进行动态补充调整,实时更新内部详细地图的定位数据。
78.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1