一种多系统UPD产品估计与检核方法与流程
一种多系统upd产品估计与检核方法
技术领域
1.本发明涉及gnss(全球卫星导航系统)技术领域,属于一种精密单点定位(ppp)定位技术中相位偏差的估计方法,是ppp技术模糊度固定的重要组成部分,尤其涉及一种多系统upd产品估计与检核方法。
背景技术:
2.精密单点定位技术融合了标准单点定位技术和广域差分定位技术,使用单台接收机,通过单向通讯、基于状态空间域改正信息,就可以实现厘米级的高精度定位。但由于gnss卫星未校正的相位延时偏差(upd)和接收机未校正的相位延时偏差(upd)与非差模糊度存在强耦合关系,导致常规ppp模型一般为模糊度浮点解。
3.在精密单点定位术中,正确固定模糊度是提高定位精度和加快收敛速度的首要条件,使用upd的改正可以恢复非差模糊度的整周特性,固定非差模糊度。常用的upd估计算法可以分为三类:第一类为ge等提出的估计星间单差的相位偏差改正数取平均法;第二类是laurichesse等从钟差估计的角度,提出的具有整数特性卫星钟差的方法;第三类为collins等提出的钟差去耦模型。
4.第一类方法必须依赖高精度的轨道钟差,待解算的模糊度浮点解达到一定精度时,才能计算相位偏差;第二类方法是以某一台接收机的相位偏差为基准,消除方程组的秩亏,不同类型接收机的相位偏差稳定性不一样,而且接收机相位偏差的稳定性与温度和光照等因素有关;第三类方法需要分别估计伪距观测值卫星钟差和相位观测值卫星钟差,和当前ppp模型计算存在差异,不利于推广。
技术实现要素:
5.发明目的:本发明的目的在于将解算的upd信息发送给用户,供用户实现非差模糊度的固定,从而加快用户端的收敛时间和实现用户端的高精度定位。
6.本发明一种多系统upd产品估计与检核方法,使用gnss系统全球或区域跟踪站的观测数据,构建多系统多频率的原始观测方程,通过引入外部基准或内部基准约束,构建基于卫星钟差、upd和大气延迟的全网状态空间误差估计模型。
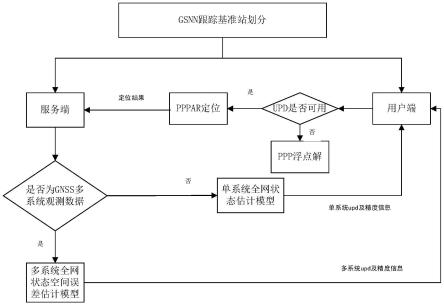
7.一种多系统upd产品估计与检核方法,包括以下步骤:
8.(1)选取gnss全球或区域跟踪站,将跟踪站分为两类,一类用来计算多系统的upd产品作为服务端,一类用来接收计算的upd产品,模拟用户进行定位作为用户端,通过定位结果来初步检核upd产品的精度;
9.(2)根据服务端选取计算upd的基准站,构建单系统的全网状态空间误差估计模型;
10.(3)构建多系统的全网状态空间误差估计模型;
11.(4)用户端在接收服务端的upd产品和精度信息时采用和服务端相同的算法进行pppar定位,同时根据接收到的upd精度信息判断是否使用服务端的upd进行定位;服务端实
时监测用户端定位结果时间序列图,若用户端在使用服务端的upd产品时出现超过3个基准站同一时刻出现或相近时刻出现大的定位结果波动时,可以初步判定服务端解算的upd产品精度存在问题,服务端进行自检,在向用户发送upd的精度信息标识为不可用,此时用户端采用ppp模糊度浮点解进行定位。
12.步骤(2)具体为:
13.(2.1)首先构建服务端,服务端由n个基准站构建而成,各基准站表示为:k=k1,、、、kn;在某历元i,各基准站共观测m颗卫星,观测的卫星s,表示为s=1,、、、,m;上述卫星分别属于gps、bds、galileo星座系统,分别用g(gps)、c(bds)、e(galileo)代表各系统;各系统可观测到的各频观测频率表示为j,其中j=1,、、、f,
14.对基准站的非差伪距、相位观测值组观测方程:
[0015][0016][0017]
式中:s,k,j表示为卫星、接收机和频率号;分别表示卫星s与站点k间在频率j上的伪距观测量和载波相位观测量;表示卫星到接收机天线相位中心的几何距离;δtk、δts表示接收机钟差及卫星钟差;分别表示对流层延迟和电离层延迟;αj是频率比值,αj=f
12
/f
j2
表示频率j的值,fj表示频率j的值;分别表示频率j上接收机和卫星的硬件延迟;分别表示频率j上接收机和卫星的载波相位偏差;λj是频率j上的载波波长;nj是频率j上的非差相位整周模糊度;是其它可模型化误差,包含天线相位中心改正、天线相位缠绕、相对论效应、潮汐改正等,上述误差已采用经验模型修正到了观测值中;是频率j的伪距观测值和相位观测噪声;c表示光速,s=(g、c、e)卫星系统数表示为m;对于一般由湿延迟和干延迟两部分组成,通过相应的映射函数投影到天顶方向,如下式所示:
[0018][0019]
其中,ztd
k,dry
、ztd
k,wet
为站点k天顶方向的对流层干延迟和湿延迟值,为站点k天顶方向的对流层干延迟和湿延迟值,为对应s卫星高度角下的干分量及湿分量映射投影函数;
[0020]
(2.2)对于基准站认为基准站坐标精确已知,将步骤(2.1)的观测方程统一成矩阵的形式;
[0021]
(2.3)步骤(2.2)中的设计矩阵的维数为(2mnf)*(m+2n+2nfm+2mf+mn+mnf),观测方程中电离层、相位偏差和模糊度等参数存在相关问题,需要引入外部基准或者对参数重定义来消除秩亏,解算需要的待估参数;
[0022]
(2.4)对各频点的伪距偏差进行参数重组,将伪距偏差定义为频率无关和相关项,将卫星和接收机的伪距偏差进行定义;
[0023]
(2.5)消除伪距偏差和电离层延迟之间的相关性,附加接收机端及卫星端无电离层伪距偏差基准和硬件延迟dcb基准,进行参数重组;
[0024]
(2.6)根据步骤(2.5),构建重新参数化的伪距和载波观测方程;
[0025]
(2.7)由于缺乏外部时间基准,定义核心基站的接收机钟差和接收机多频硬件延迟偏差(j≥3)为基准,得到此时重定义的参数物理意义;
[0026]
(2.8)步骤(2.7)重组后的观测方程中,核心基准站的接收机载波偏差和卫星载波偏差、模糊度相关,以核心基准站各频段的接收机载波偏差及模糊度为基准,重新定义卫星载波偏差、非核心站点接收机相位偏差和模糊度;
[0027]
(2.9)步骤(2.8)中,非核心基准站的伪距观测方程中,接收机间载波伪距偏差和模糊度相关,以初始历元首颗卫星r模糊度为基准,通过附加基准使得非基准星模糊度吸收基准星(s=r)模糊度,得到重新定义的接收机的载波偏差和模糊度。
[0028]
所述步骤(2.2)中观测方程统一成矩阵的形式有:
[0029]vi
=bix
i-liꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0030]
其中未知数包括n*1维各站点天顶对流层湿延迟ztdk,n*1维的接收机钟差δtk,m*1维的卫星钟差δts,nfm*1维接收机端各频点伪距偏差mf*1维卫星端各频点伪距偏差nfm*1维接收机端各频点载波偏差mf*1维卫星端各频点载波偏差mn*1维各基准站个卫星倾斜方向电离层延迟以及mnf*1维各频点基础模糊度
[0031]
所述步骤(2.4)中对各频点的伪距偏差进行参数重组,将伪距偏差定义为频率无关和相关项,卫星和接收机的伪距偏差可以定义为:
[0032][0033][0034]
式(5)和式(6)中,令分别为接收机及卫星p2与p1的硬件延迟偏差dcb。
[0035]
所述步骤(2.5)中消除伪距偏差和电离层延迟之间的相关性,附加接收机端及卫星端无电离层伪距偏差基准和硬件延迟dcb基准,此时参数重组后的实际物理意义表示为:
[0036][0037][0038][0039][0040][0041]
所述步骤(2.6)中重新参数化的伪距和载波观测方程可以表达为:
[0042]
[0043][0044][0045]
上述观测方程中接收机钟差和卫星钟差存在相关性,接收机伪距偏差和卫星伪距偏差也存在相关性。
[0046]
所述步骤(2.7)中重定义的参数物理意义如下:
[0047][0048][0049][0050][0051][0052]
使用重新定义的参数,核心基准站的伪距和相位观测方程可表达为:
[0053][0054][0055][0056]
非核心基准站伪距、相位观测方程可表达为:
[0057][0058][0059][0060]
所述步骤(2.8)中重新定义卫星载波偏差、非核心站点接收机相位偏差和模糊度,表达式为:
[0061][0062][0063][0064]
重新参数化后的核心基站载波和非核心基站的载波观测方程可表达为:
[0065][0066][0067]
所述步骤(2.9)中重新定义的接收机的载波偏差和模糊度可以表达为:
[0068][0069][0070]
此时非核心基站的载波相位的观测方程可表示为:
[0071][0072]
通过定义各级基准,待估参数个数为(nf+mf+mn+mnf-m-f+1),基准个数为(nf+mf+2m+2n+f-1),而且最终载波观测方程可以获得具有整数特性的双差模糊度参数,这样就可以解算单系统的高精度upd产品。
[0073]
所述步骤(3)具体为:
[0074]
(3.1)多系统联合定位解算时,在同一坐标和时间基准的前提下,需要考虑系统间偏差的影响,选定gps星座接收机端的各项偏差作为参考基准,其它偏差项表示与为gps系统的差值结果,在进行消秩亏时,采取和步骤(2)中相同的策略,唯一不同的是在消除接收机的载波偏差和模糊度相关性时,选取某一系统的单颗卫星为基准;其中,gps系统基准定义为gps星座接收机钟差基准多频接收机伪距偏差基准及接收机载波偏差基准
[0075]
(3.2)由于各系统的αj和λj不同,增加系统标识以区别不同星座,定义各系统间的无电离层伪距偏差多频伪距偏差及各频点载波偏差其中s≠g,各参数可以表达为:
[0076][0077][0078][0079]
对于多系统的全网状态空间误差估计模型,当存在n个基准站,每个基准站可视卫星数为m颗,包含m个星座的全频点观测值,频率数为f,,则观测方程数为2mnf,基准参数数目为(nfm+nm+2m+n+mf+fm-m),待估参数数目为(nfm-ns-m+n+mf+mn+mnf-fm+m),待估参数为每个基准站天顶对流层式延迟ztd
k,wet
,每颗可视卫星的电离层倾斜延迟非核心基准站的接收机钟差系统间的无电离层伪距偏差卫星钟差接收机各频点载波偏差系统间各频点载波偏差卫星各频点载波偏差非核心基准站接收机伪距偏差系统间接收机伪距偏差卫星伪距偏差模糊度
[0080]
按照多系统的全网状态空间误差估计模型,可以同时解算各系统卫星的upd产品和精度信息,然后发送给用户,以实现用户端的模糊度整数特性恢复,从而实现高精度定
位。
[0081]
有益效果:与现有技术相比,该方法不需要利用外部的轨道和钟差,通过引入外部基准或内部基准约束构建了多系统的全网状态空间误差估计模型,实现了所有参数的统一估计,避免分步估计upd产品时依赖其它产品的精度。本方法在估计多系统upd产品时同时记录了upd的精度信息,在向用户提供多系统upd产品时,同时也包含了upd的精度信息,用户可以根据upd的精度信息来判断服务端的upd产品信息是否可用。
附图说明
[0082]
图1为本发明流程图。
具体实施方式
[0083]
下面结合附图对本发明的技术方案作进一步说明。
[0084]
如图1所示,本发明提供一种技术方案:一种多系统upd产品估计与检核方法,包括以下步骤:
[0085]
(1)选取gnss全球或区域跟踪站,将跟踪站分为两类,一类用来计算多系统的upd产品作为服务端,一类用来接收计算的upd产品,模拟用户进行定位作为用户端,通过定位结果来初步检核upd产品的精度;
[0086]
(2)根据服务端选取计算upd的基准站,构建单系统的全网状态空间误差估计模型;
[0087]
(3)构建多系统的全网状态空间误差估计模型;
[0088]
(4)用户端在接收服务端的upd产品和精度信息时采用和服务端相同的算法进行pppar定位,同时根据接收到的upd精度信息判断是否使用服务端的upd进行定位;服务端实时监测用户端定位结果时间序列图,若用户端在使用服务端的upd产品时出现超过3个基准站同一时刻出现或相近时刻出现大的定位结果波动时,可以初步判定服务端解算的upd产品精度存在问题,服务端进行自检,在向用户发送upd的精度信息标识为不可用,此时用户端采用ppp模糊度浮点解进行定位。
[0089]
步骤(2)具体为:
[0090]
(2.1)首先构建服务端,服务端由n个基准站构建而成,各基准站表示为:k=k1,、、、kn;在某历元i,各基准站共观测m颗卫星,观测的卫星s,表示为s=1,、、、,m;上述卫星分别属于gps、bds、galileo星座系统,分别用g(gps)、c(bds)、e(galileo)代表各系统;各系统可观测到的各频观测频率表示为j,其中j=1,、、、f,
[0091]
对基准站的非差伪距、相位观测值组观测方程:
[0092][0093][0094]
式中:s,k,j表示为卫星、接收机和频率号;分别表示卫星s与站点k间在频率j上的伪距观测量和载波相位观测量;表示卫星到接收机天线相位中心的几何距离;δtk、δts表示接收机钟差及卫星钟差;分别表示对流层延迟和电离层延迟;αj是频率
比值,αj=f
12
/f
j2
表示频率j的值,fj表示频率j的值;分别表示频率j上接收机和卫星的硬件延迟;分别表示频率j上接收机和卫星的载波相位偏差;λj是频率j上的载波波长;nj是频率j上的非差相位整周模糊度;是其它可模型化误差,包含天线相位中心改正、天线相位缠绕、相对论效应、潮汐改正等,上述误差已采用经验模型修正到了观测值中;是频率j的伪距观测值和相位观测噪声;c表示光速,s=(g、c、e)卫星系统数表示为m;对于一般由湿延迟和干延迟两部分组成,通过相应的映射函数投影到天顶方向,如下式所示:
[0095][0096]
其中,ztd
k,dry
、ztd
k,wet
为站点k天顶方向的对流层干延迟和湿延迟值,为站点k天顶方向的对流层干延迟和湿延迟值,为对应s卫星高度角下的干分量及湿分量映射投影函数;
[0097]
(2.2)对于基准站认为基准站坐标精确已知,将步骤(2.1)的观测方程统一成矩阵的形式;
[0098]
(2.3)步骤(2.2)中的设计矩阵的维数为(2mnf)*(m+2n+2nfm+2mf+mn+mnf),观测方程中电离层、相位偏差和模糊度等参数存在相关问题,需要引入外部基准或者对参数重定义来消除秩亏,解算需要的待估参数;
[0099]
(2.4)对各频点的伪距偏差进行参数重组,将伪距偏差定义为频率无关和相关项,将卫星和接收机的伪距偏差进行定义;
[0100]
(2.5)消除伪距偏差和电离层延迟之间的相关性,附加接收机端及卫星端无电离层伪距偏差基准和硬件延迟dcb基准,进行参数重组;
[0101]
(2.6)根据步骤(2.5),构建重新参数化的伪距和载波观测方程;
[0102]
(2.7)由于缺乏外部时间基准,定义核心基站的接收机钟差和接收机多频硬件延迟偏差(j≥3)为基准,得到此时重定义的参数物理意义;
[0103]
(2.8)步骤(2.7)重组后的观测方程中,核心基准站的接收机载波偏差和卫星载波偏差、模糊度相关,以核心基准站各频段的接收机载波偏差及模糊度为基准,重新定义卫星载波偏差、非核心站点接收机相位偏差和模糊度;
[0104]
(2.9)步骤(2.8)中,非核心基准站的伪距观测方程中,接收机间载波伪距偏差和模糊度相关,以初始历元首颗卫星r模糊度为基准,通过附加基准使得非基准星模糊度吸收基准星(s=r)模糊度,得到重新定义的接收机的载波偏差和模糊度。
[0105]
所述步骤(2.2)中观测方程统一成矩阵的形式有:
[0106]vi
=bix
i-liꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0107]
其中未知数包括n*1维各站点天顶对流层湿延迟ztdk,n*1维的接收机钟差δtk,m*1维的卫星钟差δts,nfm*1维接收机端各频点伪距偏差mf*1维卫星端各频点伪距偏差nfm*1维接收机端各频点载波偏差mf*1维卫星端各频点载波偏差mn*1维各基准站个卫星倾斜方向电离层延迟以及mnf*1维各频点基础模糊度
[0108]
所述步骤(2.4)中对各频点的伪距偏差进行参数重组,将伪距偏差定义为频率无
关和相关项,卫星和接收机的伪距偏差可以定义为:
[0109][0110][0111]
式(5)和式(6)中,令分别为接收机及卫星p2与p1的硬件延迟偏差dcb。
[0112]
所述步骤(2.5)中消除伪距偏差和电离层延迟之间的相关性,附加接收机端及卫星端无电离层伪距偏差基准和硬件延迟dcb基准,此时参数重组后的实际物理意义表示为:
[0113][0114][0115][0116][0117][0118]
所述步骤(2.6)中重新参数化的伪距和载波观测方程可以表达为:
[0119][0120][0121][0122]
上述观测方程中接收机钟差和卫星钟差存在相关性,接收机伪距偏差和卫星伪距偏差也存在相关性。
[0123]
所述步骤(2.7)中重定义的参数物理意义如下:
[0124][0125][0126][0127][0128]
[0129]
使用重新定义的参数,核心基准站的伪距和相位观测方程可表达为:
[0130][0131][0132][0133]
非核心基准站伪距、相位观测方程可表达为:
[0134][0135][0136][0137]
所述步骤(2.8)中重新定义卫星载波偏差、非核心站点接收机相位偏差和模糊度,表达式为:
[0138][0139][0140][0141]
重新参数化后的核心基站载波和非核心基站的载波观测方程可表达为:
[0142][0143][0144]
所述步骤(2.9)中重新定义的接收机的载波偏差和模糊度可以表达为:
[0145][0146][0147]
此时非核心基站的载波相位的观测方程可表示为:
[0148][0149]
通过定义各级基准,待估参数个数为(nf+mf+mn+mnf-m-f+1),基准个数为(nf+mf+2m+2n+f-1),而且最终载波观测方程可以获得具有整数特性的双差模糊度参数,这样就可以解算单系统的高精度upd产品。
[0150]
所述步骤(3)具体为:
[0151]
(3.1)多系统联合定位解算时,在同一坐标和时间基准的前提下,需要考虑系统间偏差的影响,选定gps星座接收机端的各项偏差作为参考基准,其它偏差项表示与为gps系统的差值结果,在进行消秩亏时,采取和步骤(2)中相同的策略,唯一不同的是在消除接收机的载波偏差和模糊度相关性时,选取某一系统的单颗卫星为基准;其中,gps系统基准定义为gps星座接收机钟差基准多频接收机伪距偏差基准及接收机载波偏差
基准
[0152]
(3.2)由于各系统的αj和λj不同,增加系统标识以区别不同星座,定义各系统间的无电离层伪距偏差多频伪距偏差及各频点载波偏差其中s≠g,各参数可以表达为:
[0153][0154][0155][0156]
对于多系统的全网状态空间误差估计模型,当存在n个基准站,每个基准站可视卫星数为m颗,包含m个星座的全频点观测值,频率数为f,,则观测方程数为2mnf,基准参数数目为(nfm+nm+2m+n+mf+fm-m),待估参数数目为(nfm-ns-m+n+mf+mn+mnf-fm+m),待估参数为每个基准站天顶对流层式延迟ztd
k,wet
,每颗可视卫星的电离层倾斜延迟非核心基准站的接收机钟差系统间的无电离层伪距偏差卫星钟差接收机各频点载波偏差系统间各频点载波偏差卫星各频点载波偏差非核心基准站接收机伪距偏差系统间接收机伪距偏差卫星伪距偏差模糊度
[0157]
按照多系统的全网状态空间误差估计模型,可以同时解算各系统卫星的upd产品和精度信息,然后发送给用户,以实现用户端的模糊度整数特性恢复,从而实现高精度定位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1