白帽检测设备的制作方法
1.本发明涉及一种用于分析谷物样品的设备和具有这种设备的联合收割机。本发明还涉及一种使用该设备分析谷物样品的方法。
背景技术:
2.联合收割机是一种复杂的农业机械,其可在田间行驶以收割谷物作物,同时将谷物穗从植物分离,并将谷粒从穗分离。在某些谷物作物品种(诸如小麦)中,谷粒被谷壳包裹,谷壳在脱粒、分离和清洁单元中与谷粒分离。分离的谷粒(也称为清洁谷物)通常聚集在联合收割机底部附近的清洁单元下方。从那里,谷物升降机将干净的谷物运送到大型谷物罐中,该罐容纳收获的谷物,直到将其卸载到例如从田间获取收获的谷物的拖车或卡车中。秸秆、谷壳和其它非谷物材料通常会掉落或散布在田地上。非谷物材料通常被称为mog(除谷物之外的材料)。
3.理想情况下,联合收割机将从作物中提取所有谷粒并将它们装到谷物罐中,而不会同时吸收谷壳、秸秆和其它非谷物材料。在实践中,必须在最大限度地提高(每平方米田地和/或每分钟)收获的谷物量与最大限度地减少最终在谷物罐中的破碎谷粒或mog量之间找到最佳状态。可以控制联合收割机的许多操作参数以实现这种最佳状态。例如,这样的操作参数包括行驶速度、脱粒转子速度、转子笼间隙、清洁筛开口和清洁风扇速度。许多促进谷粒高产的控制设置也可能导致谷物破碎和大量mog。相反,将谷物破碎和mog降至最低的控制设置通常会导致谷物产量降低。最佳控制设置难以确定并且会随着例如作物、天气和田间条件的变化而不断地改变。
4.为了改进对联合收割机所有操作参数的控制,使用了许多不同的传感器。当今用于该目的的一种特别有用的感测系统是所谓的谷物凸轮,诸如在公开为wo 2006/010761 a1的国际专利申请中公开的那种,它周期性地捕获清洁谷物升降机中谷物的图像或从清洁谷物升降机中取出的谷物样品的图像。使用标准的且更先进的图像识别技术对捕获的图像进行分析,以区分谷粒、秸秆碎片、破碎谷物和谷壳。当观察到的谷物样品的mog含量超过预定限度时,可以调整收割机设置和行进速度。
5.虽然在wo 2006/010761 a1中公开的谷物凸轮对于确定谷物样品中mog或破碎谷粒的相对量是有用的,但它不能区分所有相关类型的mog。更具体而言,已知的谷物凸轮不能区分空的谷壳颗粒和仍然保持有谷粒的谷壳颗粒(通常称为白帽)。在谷物凸轮捕获的图像中,(空的)谷壳颗粒和白帽无法区分。这是一个问题,因为谷物样品中谷壳过多和白帽含量过多需要非常不同的对策。例如,可以通过增加清洁风扇的风扇速度来避免谷壳过多。例如,可以通过调整脱粒转子的转子速度和/或通过减小脱粒转子和转子笼之间的间隙来避免白帽过多。
6.本发明的目的是解决与现有技术相关联的一个或多个缺点。
技术实现要素:
7.根据本发明的一个方面,提供了一种用于分析谷物样品的设备,包括光源、图像传感器和控制器。光源被配置用于照亮谷物样品。图像传感器用于捕获谷物样品的图像。控制器耦合到图像传感器,用于从其接收谷物样品的图像,并且被配置为分析图像以检测谷物样品中除谷物之外的至少一种材料。在根据本发明的设备中使用的光源被配置为用局部光斑照亮谷物样品,该光斑的尺寸小于平均小麦粒的宽度。
8.当局部光斑击中空谷壳颗粒时,光的至少一部分将穿过谷壳的壳并且在空壳的内表面反射。该反射光中的一些(可能在多次内部反射之后)将再次穿过谷壳的壳,然后被图像传感器捕获。因此,整个(或几乎整个)谷壳颗粒在谷物样品的捕获图像中亮起。当局部光斑击中白帽,即包含谷粒的谷壳颗粒时,谷粒吸收最初穿过谷壳的壳的光。谷粒对光的这种吸收防止光深入到谷壳颗粒中并在谷壳的壳的内表面反射。因此,在谷物样品的捕获图像中,只有在谷壳颗粒外壳处的光斑的局部直接反射才会亮起。因此,从反射的宽度可以确定谷壳颗粒是否包含谷粒。这使得根据本发明的设备能够将空谷壳颗粒与白帽区分开来。
9.为了允许谷粒吸收入射光的大部分,重要的是光斑的尺寸(直径、长度和/或宽度)小于平均谷粒的宽度。较大的光斑将照亮谷壳的壳的整个外表面。然后在其外表面的直接反射将导致整个谷壳的壳出现在捕获的图像中,从而使得无法将空谷壳颗粒和白帽区分开来。
10.光斑在谷物样品上的投影优选地是圆形或基本圆形,但是可以使用不同形状的光斑作为替代方案。对于圆形光斑,光斑尺寸由光斑的直径定义。对于本发明,任何非圆形光斑的“尺寸”在本文中被定义为光斑中可识别的最大可用维度。该最大维度通常将是光斑的长度和宽度中的最大值。
11.不同的谷物作物和谷物作物品种可能具有不同尺寸的谷粒。优选地,光斑尺寸小于可用的最小谷物作物品种的平均谷粒,使得该设备可以用于各种作物。因为根据本发明的设备将主要用于小麦,因此光斑尺寸优选地至少小于小麦粒的平均尺寸。此类光斑还可以用于检测其它谷物作物类型和作物类型品种(诸如,黑麦、黑小麦、燕麦、大豆或水稻)中的白帽。优选地,局部光斑的直径小于5mm,更优选地,小于3mm、2mm、1mm或0.5mm。
12.在优选实施例中,光源包括用于生成局部光斑的激光源。替代地,可以使用高度聚焦的led或其它类型的光源。
13.为了能够检测谷物样品中不同位置的白帽,光源优选地被配置为用多个局部光斑照亮谷物样品,这些光斑的尺寸小于平均小麦粒的宽度。多个光斑可以例如沿着至少基本上直线布置和/或以网格图案布置。
14.替代地或附加地,光源可以被配置为相对于谷物样品移动局部光斑。这可以通过控制光斑的位置或通过移动谷物样品来实现。例如,单个光斑或具有多个光斑的水平线可以瞄准固定位置,而谷物样品移动经过该位置。谷物样品的移动可以至少部分地由重力引起或由谷物升降机中的谷物的向上运输引起。
15.除了局部光斑之外,光源还可以被配置为用宽光斑照亮谷物样品,该宽光斑的尺寸大于平均小麦粒的长度的数倍。宽光斑可以具有至少5cm的直径。优选地,宽光斑照亮全部谷物样品或至少大部分谷物样品。可以以已知方式处理使用这种宽光斑捕获的图像,并提供关于谷物样品中谷壳位置的信息。然后该信息可以用于将局部光斑引导到检测到谷壳
的壳的位置。通过使用局部光斑,然后可以确定检测到的谷壳的壳表示空谷壳颗粒还是白帽。替代地,从使用宽光斑捕获的图像中获得的信息可以用于将图像处理区域限制为其中检测到谷壳是颗粒的那些区域。
16.根据本发明的另一方面,提供了一种联合收割机,包括如上所述用于分析谷物样品的设备。联合收割机可以包括清洁谷物升降机,用于将清洁谷物输送到谷物罐,用于分析谷物样品的设备被布置为在清洁谷物升降机或其旁路部分中捕获谷物的图像。
17.根据本发明的另一方面,提供了一种使用如上所述设备分析谷物样品的方法。该方法包括以下步骤:
18.使用光源用尺寸小于平均小麦粒宽度的局部光斑照亮谷物样品,
19.使用图像传感器来捕获谷物样品的至少一个图像,
20.分析至少一幅捕获的图像以确定谷物样品处局部光斑的反射,以及
21.基于所确定的反射检测谷物样品中除谷物之外的材料。
22.根据本发明的另一方面,提供了一种包括指令的计算机程序,所述指令在由计算机执行时使计算机执行如上所述的方法。
附图说明
23.现在将参考附图以示例的方式描述本发明的实施例。
24.图1示出了一种联合收割机,其中可以有利地使用根据本发明的谷物凸轮。
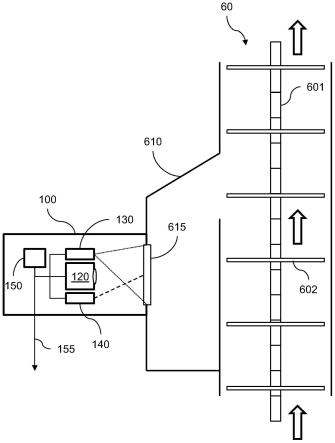
25.图2示意性地示出了具有根据本发明的谷物凸轮的清洁谷物升降机。
26.图3示出了由图2的谷物凸轮捕获的图像,其中谷物样品被宽光斑照亮。
27.图4示出了在局部光斑照亮时谷壳颗粒和白帽的反射曲线。
28.图5示出了由图2的谷物凸轮捕获的图像,其中谷物样品被局部光斑照亮。
29.图6a示出了由局部光斑照亮的空谷壳颗粒的照片。
30.图6b示出了由局部光斑照亮的白帽颗粒的照片。
31.图7示出了根据本发明的方法的实施例的流程图。
具体实施方式
32.图1示出了联合收割机10形式的农业收割机,其通常包括前后圆形接合轮14、16、割台18、给料机20、操作室22、脱粒和分离系统24、清洁系统26、谷物罐28和卸载管30。应该认识到的是,虽然农业收割机被显示为联合收割机10,但根据本发明的农业收割机可以被实施为允许收割作物材料的任何构造,诸如常规的联合收割机(其没有转子)、旋转联合收割机、混合联合收割机、切碎收割机等。
33.割台18安装在联合收割机10的前部并且包括用于在联合收割机向前运动期间从田地中切断作物的刀具杆34。可旋转的卷轴36将作物送入到割台18中,并且双螺旋输送器38将切断的作物从每一侧横向地送入给料机20。给料机20将切断的作物输送到脱粒和分离系统24。
34.脱粒和分离系统24是轴流式的并且包括脱粒转子40,该脱粒转子40至少部分地位于脱粒凹部42内并且可旋转。脱粒凹部可以采取穿孔凹部的形式。在脱粒凹部42内的脱粒转子40的作用下,来自切断的作物的谷物被脱粒并与mog分离。mog的较大元素(诸如茎和
叶)不通过脱粒凹部42中的孔眼而从联合收割机10的后部排出。mog的谷物和较小元素(以下称为小mog,诸如谷壳、灰尘和秸秆)足够小以通过脱粒凹部42中的穿孔,然后从脱粒和分离系统24排出。
35.已成功通过脱粒和分离系统24的谷物和小mog落到准备盘44上并被输送到清洁系统26。清洁系统包括一系列筛子和清洁风扇52。该系列筛子包括预清洁筛46、上筛(或颖糠筛)48和下筛(或鞋筛(shoe sieve))50。清洁风扇52生成通过筛子46、48、50的气流,其撞击筛子上的谷物和小mog。小mog通常比谷物轻,因此当它在空中时与谷物分离。随后经由秸秆罩54将小mog从联合收割机10中排出。
36.准备盘44和预清洁筛46以前后方式摆动,将谷物和小mog输送到上筛48的上表面。上筛48垂直地布置在下筛50上方,并且也以前后方式摆动,使得谷物和小mog散布在两个筛48、50上,同时还允许清洁谷物在重力的作用下通过筛48、50中的开口。
37.清洁谷物落入清洁谷物螺旋输送器56,该清洁谷物螺旋输送器56定位在下筛50下方和前方,并且跨联合收割机10的宽度。清洁谷物螺旋输送器56将清洁谷物横向传送到垂直谷物升降机60,该垂直谷物升降机60被布置为将清洁谷物输送到谷物罐28。一旦进入谷物罐28,谷物罐底部的谷物罐螺旋输送器68将谷物罐28内的清洁谷物横向传送到卸载管30以从联合收割机10排出。
38.图2示意性地示出了图1的联合收割机10的清洁谷物升降机60,其配备有根据本发明的实施例的谷物凸轮100。谷物升降机60包括链条或皮带601,其上附有桨叶602。链条或皮带601被驱动以使桨叶602在谷物升降机60的一侧向上移动并在另一侧向下移动。当向上移动时,桨叶602携带从下筛50下方的清洁谷物螺旋输送器56获得的清洁谷物(未示出)。在谷物升降机60的顶部,该清洁谷物然后被传递到用于将谷物引入到谷物罐28中的螺旋输送器,然后传送谷物的桨叶602开始其向下的行程。
39.在谷物升降机60的向上区段,设有旁路710。在操作期间,由谷物升降机桨叶602向上输送的部分谷物被引导或可以被引导到旁路710中。旁路710包括窗口615。当旁路710充满谷物时,可以从旁路710的外部通过窗口615看到该谷物。谷物凸轮100以使得谷物凸轮100的图像传感器或相机120可以捕获窗口615后面可见的谷物样品的图像的方式附接到旁路710。除了相机120之外,谷物凸轮100还包括一个或多个光源130、140,用于在捕获窗口615后面的谷物样品的图像时照亮该谷物样品。提供控制器150用于控制光源130、140和相机120,并且用于处理由相机120获得的图像数据。
40.通信线路155将谷物凸轮控制器150耦合到联合收割机10的中央控制器,以使得可以根据谷物凸轮控制器150执行的图像分析的结果来调整联合收割机10的相关控制设置。联合收割机控制设置的这种调整可以是全自动的、用户发起的或它们的组合。替代地,实施在谷物凸轮处理器150中的谷物凸轮控制功能和/或图像数据处理功能至少部分地由联合收割机10的中央控制器或可操作地耦合到谷物凸轮100的一些其它控制器执行。
41.根据本发明,光源130、140至少包括局部光斑源140,该局部光斑源140被配置为用尺寸小于平均小麦粒宽度的局部光斑照亮谷物样品。局部光斑源140可以包括激光器。替代地,可以使用高度聚焦的led或其它类型的光源。除了局部光斑源140之外,可以提供宽光斑源130以用尺寸大于平均小麦粒长度数倍的宽光斑照亮谷物样品。宽光斑可以具有至少5cm的直径。优选地,宽光斑照亮可以通过窗口615观察到的全部或至少大部分谷物样品。宽光
斑源130例如可以包括多个led或一个或多个白炽光源。可以以已知方式处理使用这种宽光斑捕获的图像,并提供关于谷物样品中谷壳位置的信息。
42.注意,虽然这里所示的谷物凸轮100被配置用于捕获联合收割机10的清洁谷物升降机60的旁路区段710中的谷物样品的图像,但谷物凸轮100同样可以适用于需要分析谷物样品的其它位置。例如,这样的其它位置可以包括联合收割机10、谷仓或实验室环境中的不同位置。
43.图3示出了由图2的谷物凸轮100捕获的图像,其中谷物样品被宽光斑源130照亮。在这些照明条件下捕获的图像与可以通过例如wo 2006/010761a1中描述的谷物凸轮捕获的图像相同或相似。如图3中可见,该图像示出了多个谷粒310和四个谷壳的壳320、330,它们通过窗口615可见。实际上,图像中也可能出现其它类型的mog,诸如秸秆颗粒。该图像示出了由相机120记录的由谷粒310和谷壳的壳320、330的外表面反射的光。白帽是仍然包含谷粒的谷壳的壳。
44.从外面看,空的谷壳的壳(本文也称为“谷壳颗粒”320)看起来如果不与白帽330完全一样的话也非常相似。这是一个问题,因为谷物样品中谷壳过多和白帽含量过多需要非常不同的对策。例如,可以通过增加清洁风扇52的风扇速度来避免谷壳过多。例如,可以通过调整脱粒转子40的转子速度和/或通过减小脱粒转子40和转子笼42之间的间隙来避免白帽过多。
45.根据本发明,该问题通过将局部光斑源140添加到谷物凸轮100来解决。当局部光斑击中空谷壳颗粒320时,光的至少一部分穿过谷壳的壳并且在空壳320的内表面反射。该反射光中的一些(可能在多次内部反射之后)将再次穿过谷壳的壳320,然后被相机120捕获。因此,整个(或几乎整个)谷壳颗粒320在谷物样品的捕获图像中亮起。当局部光斑击中白帽330(即包含谷粒的谷壳颗粒)时,谷粒吸收或非常局部地反射最初穿过谷壳的壳的光。谷粒对光的这种吸收或非常局部的反射防止光深入到谷壳颗粒中并在谷壳的壳的内表面反射。因此,在谷物样品的捕获图像中,只有在谷壳颗粒外壳处的光斑的非常局部的直接反射才会亮起。因此,从反射的宽度可以确定谷壳颗粒是否包含谷粒。这使得谷物凸轮100可以将空谷壳颗粒320与白帽330区分开来。
46.为了图示反射行为的这种差异,图4示出了当被局部光斑照亮时空谷壳颗粒320和白帽330的反射曲线。如在该图中可以看出,空谷壳颗粒320和白帽(330)都显示出由光斑在谷壳的壳的外表面的直接反射引起的反射峰(以任意单位指示)。如果谷壳的壳包围谷粒,如在白帽330中的情况,那么大部分剩余的光被谷粒吸收。如果谷壳的壳是空的,则谷壳的壳在其几乎整个外表面上都会发光。
47.为了允许谷粒吸收入射光的大部分,重要的是光斑的尺寸(直径、长度和/或宽度)小于平均谷粒的宽度。较大的光斑将照亮谷壳的壳的整个外表面。然后在其外表面的直接反射将导致整个谷壳的壳出现在捕获的图像中,从而使得无法将空谷壳颗粒320和白帽330区分开来。优选地,局部光斑的直径小于5mm,更优选地,小于3mm、2mm、1mm或0.5mm。
48.图5示出了由图2的谷物100凸轮捕获的图像,其中谷物样品被局部光斑500照亮。这里,可以看出两个空谷壳颗粒320在它们的整个外表面上发光,而白帽330仅显示出局部光斑500的小的直接反射。
49.为了能够检测谷物样品中不同位置处的白帽330并获得例如图5中所示的图像,局
部光斑源140优选地被配置为用多个局部光斑照亮谷物样品。多个光斑可以例如沿着至少基本上直线布置和/或以网格图案布置。
50.替代地或附加地,局部光斑源140可以被配置为相对于谷物样品移动局部光斑。这可以通过控制光斑的位置或通过移动谷物样品来实现。例如,单个光斑或具有多个光斑的水平线可以瞄准固定位置,而谷物样品移动经过该位置。例如,这可以通过逐步或连续降低载有谷物样品的平台同时相机120捕获该谷物样品的一系列图像来实现。替代地,旁路710具有定位在低于窗口615的位置处的可控出口。当旁路710充满谷物时,出口保持关闭。然后可以在出口仍然关闭的情况下捕获第一图像。然后随后的图像可以在谷物经由出口离开旁路710时被捕获,从而导致谷物样品暂时沿着旁路窗口615逐渐向下移动。实现谷物样品沿着旁路窗口615的类似移动的其它机械解决方案对于任何足够熟练的技术人员来说都是清楚的。替代地,当相机直接安装在谷物升降机60上时,谷物被升降机向上提升,也在图像捕获过程期间在谷物表面上生成局部光斑的相对移动。
51.图6a和图6b分别示出了由局部光斑照亮的较大谷物样品中的空谷壳颗粒和白帽颗粒的照片。这两张照片证实了上面已经参考图5的图像所描述的内容。在两张照片中,都可以看到局部光斑的直接反射。除此之外,图6a清楚地示出了整个空谷壳颗粒如何由于空谷壳颗粒内部的光的内部反射而发光。在图6b中,可以看到大部分光是如何被白帽颗粒内部的谷粒吸收的,从而显著减少内部反射。因此,白帽颗粒主要在被局部光斑击中的区域附近发光。如上所述,图6a的照片中的空谷壳颗粒与图6b的照片中的白帽颗粒之间的这种反射图案的差异被根据本发明的设备和方法使用,以检测谷物样品中的白帽颗粒。
52.图7示出了根据本发明的方法的实施例的流程图。该方法从宽照明步骤710开始,其中宽光斑光源130用于照亮至少大部分。优选地,照亮全部谷物样品(只要它能通过窗口615可见)。在第一图像捕获步骤720中,相机120然后捕获谷物样品的至少一个图像。在该第一图像捕获步骤720中获得的图像可以例如看起来像图3中所示的图像。
53.使用已知的图像处理技术(诸如过滤、分割、边缘检测和阈值化),然后在第一图像分析步骤730中分析捕获的图像。在该第一图像分析步骤730中,可以识别谷粒310、谷壳的壳320、330、秸秆颗粒和其它类型的mog。在优选实施例中,经训练的神经网络和其它人工智能(ai)算法可以用于对谷物样品的不同成分进行识别和计数。可以使用先前分析的图像获得此类ai算法的训练数据集。
54.在随后的局部照明步骤740中,局部光斑源140用于用尺寸小于平均小麦粒宽度的局部光斑来照亮谷物样品。优选地,使用多个局部光斑在相应的多个不同位置同时照亮谷物样品。然后,在第二图像捕获步骤750中,相机120捕获谷物样品的至少一个图像。在该第二图像捕获步骤750中获得的图像可以例如看起来像图5中所示的图像。在局部光斑或多个局部光斑没有一次覆盖全部谷物样品的情况下,可以控制局部光斑源140移动局部光斑并且可以重复局部照明步骤740以及第二图像捕获步骤750,直到获得全部谷物样品的整个图像。
55.在第二图像分析步骤760中,分析在第二图像捕获步骤750中获得的一个或多个图像以检测谷物样品中的空谷壳颗粒320和白帽330。同样对于该第二图像分析步骤760,可以使用标准的和更先进的图像处理技术。如果ai算法用于该第二图像分析步骤760,那么可以使用先前分析的图像再次获得训练数据集。这样的训练数据可以使用多个受控谷物样品来
生成,其中在捕获和分析谷物样品的图像之前标记空谷壳颗粒320和/或白帽330。优选地,使用使得标记不能被谷物凸轮100的相机120检测到的技术来标记空谷壳颗粒320和/或白帽330。例如,放射性或uv反射染料可以用于标记白帽330。
56.在优选实施例中,第一图像分析步骤730的结果被用作第二图像分析步骤720的输入。在第一图像分析步骤730的结果可以指示在谷物样品中发现谷壳的壳320、330的位置的情况下,然后可以使用第二图像分析步骤760来区分空谷壳颗粒320和白帽330。注意,图6中所示方法的前两个步骤是可选的,因此对于白帽的检测不是必需的。可以用仅包括局部光斑源140而没有宽光斑源130的谷物凸轮100来检测白帽330和空谷壳颗粒320。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1