车轮速度检测系统的制作方法
1.本发明涉及车轮速度检测系统。
背景技术:
2.如今,道路上几乎所有的车辆都配备有防抱死制动系统(abs)或电子稳定程序(esp)。这些系统通过在制动时改进车辆稳定性或者通过在危急道路条件下稳定驾驶行为来防止事故。
3.abs和esp系统二者都使用轮速传感器,轮速传感器单独检测每个车轮的角速度。角速度检测由安装在汽车的每个车轮上的电子传感器实现,该电子传感器检测每个车轮旋转的固定数量的脉冲。abs/esp电子控制单元(abs/esp ecu)检测每个车轮的每个传感器脉冲并且控制每个车轮的制动力以便在任何时间优化车辆稳定性。
4.车辆内的典型车轮速度传感器经由单独的电线直接连接到abs/esp ecu。这种检测各个车轮转速的车轮速度传感器产生相对低带宽的信号,但是具有时延敏感的特性。车轮速度传感器主要使用模拟信号,并且布线从全部四个车轮延伸穿过车辆达到abs/esp ecu。这已经是一种可靠的解决方案,但是它在材料方面是昂贵的并且在诊断和修理方面具有挑战性。
5.因此,需要一种车轮速度检测系统,该车轮速度检测系统能够容易地进行诊断和修理,并且降低了对材料成本的要求。
技术实现要素:
6.一个方面,本发明涉及一种车辆的车轮速度检测系统。该车轮速度检测系统包括:多个车轮速度传感器,其中,每个车轮速度传感器被配置成监测车辆的相应车轮的速度;多个控制装置,其中,每个控制装置通信地联接到所述车轮速度传感器中的至少一个;以及中央电子控制单元,该中央电子控制单元经由网络连接通信地联接到所述控制装置中的每一个并且被配置成处理从所述控制装置中的每一个接收到的数据。
7.代替可以是用于防抱死制动系统和/或电子稳定性程序(abs/esp ecu)的电子控制单元的单个中央控制单元,车轮速度检测系统包括多个控制装置,每个控制装置被分配并连接到车辆的一个或更多个车轮速度传感器。因此,不再需要像abs/esp ecu这样的中央单元与车轮速度传感器之间的直接电线连接。因此,可以是车辆线束的一部分的直接布线至少部分地被每个控制装置与中央电子控制单元之间的网络连接代替。因此,可以简化车辆线束,从而降低材料成本。
8.控制装置可以位于车辆的不同区域中,并且可以用于控制车辆的其他装置和功能(即,除了车轮速度传感器之外)。控制装置与各个车轮速度传感器的联接可以通过有线连接或通过另外的网络连接来实现。因此,由于控制装置的分散架构及其与中央电子控制单元的网络连接,车轮速度检测系统内的直接布线可以保持为最小。在基于车轮速度传感器的信号的信息被传送到例如abs/esp ecu之前,中央电子控制单元对从控制装置接收到的
数据进行预处理。
9.由于多个控制装置及它们与各个车轮速度传感器的单独联接和分配,可以简化车轮速度检测系统的诊断和修理。即,可以基于从各个控制装置接收到的数据执行诊断,这允许对车轮速度检测系统内的故障进行简化和局部化的检测,所述故障可能与例如各个车轮速度传感器相关。结果,由于可能故障的详细定位,也可以支持诊断之后的修理。
10.总之,由于多个控制装置被联接和分配到车轮速度传感器并且具有与中央电子控制单元的网络连接,多个控制检测系统降低了关于车辆内布线的要求,同时简化了车轮速度检测系统的诊断和修理。
11.电子控制单元(ecu)可以包括处理单元、至少一个存储器单元以及至少一个非暂时性数据存储器。如本文所用的,术语电子控制单元和处理单元可指专用集成电路(asic),可用是专用集成电路(asic)的一部分或包括专用集成电路(asic);电子电路;组合逻辑电路;现场可编程门阵列(fpga);执行代码的处理器(共享、专用或组);提供所述功能的其他合适的组件;或上述的一些或全部的组合,诸如片上系统中。电子控制单元和处理单元可以包括存储由处理器执行的代码的存储器(共享、专用或组)。
12.车轮速度检测系统可以包括以下特征中的一个或更多个:
13.每个控制装置可以被分配给车辆的预定区域。中央电子控制单元与每个控制装置之间的网络连接可以包括经由数字通信总线的连接。各个控制装置和车轮速度传感器中的至少一个可以经由有线连接来连接。另选地,各控制装置和至少一个车轮速度传感器可以经由数字通信总线连接。
14.中央电子控制单元与每个控制装置之间的网络连接可以包括经由具有第一数据传输速率的数字通信总线的连接,每个控制装置和至少一个车轮速度传感器可以经由具有第二数据传输速率的数字通信总线连接,并且第一数据传输速率可以不同于第二数据传输速率。各控制装置可以与车轮速度传感器中的单独一个连接。另选地,控制装置中的至少一个可以连接到至少两个车轮速度传感器。多个控制装置中的每一个可以包括本地时基,本地时基可以与由中央电子控制单元提供的中央时基同步。此外,多个控制装置中的每一个的本地时基可以与中央时基周期性地同步。
15.所述多个控制装置中的每一个可被配置为检测由所述车轮速度传感器中的所述至少一个提供的脉冲,并且所述多个控制装置中的每一个可生成网络封包,所述网络封包包括所述相应控制装置检测到所述脉冲中的一个脉冲的时间点以及检测到所述脉冲中的所述一个脉冲的所述相应车轮速度传感器的标识符。
16.所述多个控制装置中的至少一个控制装置可被配置为从由所述至少一个车轮速度传感器提供的信号导出另外的量,其中,所述另外的量不同于车轮速度。另外,多个控制装置中的至少一个控制装置可以被配置为对不同于车轮速度传感器的至少一个另外的传感器或装置进行控制。
17.根据实施方式,每个控制装置可以被分配给车辆的预定区域。每个控制装置可以位于其被分配到的车辆的相应预定区域中。由于每个控制装置的这种局部布置,可以进一步降低车辆对布线的要求。
18.每个预定区域可以被认为是“局部”区域,并且可以是车辆内的空间受限区域。例如,车辆可以包括与车辆的四个角部或四个车轮中的每一个相关的四个区域。对于该示例,
每个控制装置还可以被分配并通信地联接到对车辆的四个车轮中的相应一个车轮的速度进行检测的单独车轮速度传感器。由于对预定区域的分配和该区域中的局部布置,相应的控制装置也可以被视为区域控制器。
19.将相应的控制装置分配给车辆内的预定区域或空间限制区域使得能够定位由相应的控制装置和相应的一个或更多个车轮速度传感器提供的信息。因此,控制装置和/或相应的车轮速度传感器的错误或故障可以基于各个控制装置到中央电子控制单元的网络连接而相应地定位。因此,由于控制装置的分区分配,可以进一步简化系统的诊断,并且可以相应地支持修理。
20.根据另一个实施方式,中央电子控制单元和每个控制装置之间的网络连接可以包括经由数字通信总线的连接。像基于标准化网络协议的以太网连接这样的连接可以使得能够在中央电子控制单元和控制装置内使用标准化电子组件。这可以降低车轮速度检测系统的成本。
21.根据另一实施方式,控制装置中的每一个和车轮速度传感器中的至少一个可以经由有线连接来连接。在这种情况下,公共车轮速度传感器可以用于该系统,而只需要延伸到局部控制装置的相对短的有线连接,而不是到中央单元的需要长得多的有线连接的连接。
22.另选地,各个控制装置和至少一个车轮速度传感器可以经由数字通信总线连接。对于该实施方式,在车轮速度检测系统内可以不需要有线连接。这可以进一步简化车辆的线束。
23.根据另一个实施方式,中央电子控制单元和每个控制装置之间的网络连接可以包括经由具有第一数据传输速率的数字通信总线的连接,并且每个控制装置和至少一个车轮速度传感器可以经由具有第二数据传输速率的数字通信总线连接。第一数据传输速率可以不同于第二数据传输速率。例如,第一数据传输速率可以是至少1gbit/s,而第二数据传输速率可以是大约100mbit/s。即,在车轮速度检测系统中可以使用数据速率的混合。
24.控制装置与中央电子控制单元之间的较高传输速率可以确保用于将由各个车轮速度传感器提供的信号或信息传输到中央电子控制单元的时延可以被保持得最小,例如小于1ms。这对于控制装置是车辆的区域控制器的系统可能是相关的,该区域控制器对附加的部件或装置(即,除了车轮速度传感器之外的部件或装置)进行控制。另一方面,对于连接在控制装置与各个车轮速度传感器之间的数字通信总线(例如,以太网连接)而言,较低的传输速率可能是足够的。
25.根据另一实施方式,每个控制装置可连接到单独的一个车轮速度传感器。换言之,在控制装置与车轮速度传感器之间可以存在一对一的对应关系。这种对应可以进一步简化和改进车轮速度检测系统的诊断和修理。另选地,控制装置中的至少一个可以连接到至少两个车轮速度传感器。例如,一个区域控制装置可以连接到车辆后轮的两个车轮速度传感器。由此,能够减少车轮速度检测系统所需要的控制装置的数量。
26.根据另一实施方式,多个控制装置中的每一个可以包括与由中央电子控制单元提供的中央时基同步的本地时基。此外,多个控制装置中的每一个的本地时基可以与中央时基周期性地同步。由于周期性同步,可以提高由车轮速度传感器经由局部控制装置提供的信息的可靠性。
27.根据另一实施方式,多个控制装置中的每一个可被配置为检测由至少一个车轮速
度传感器提供的脉冲。所述多个控制装置中的每一个可生成网络封包,所述网络封包包括相应控制装置检测到所述脉冲中的一个脉冲的时间点以及检测到所述脉冲中的所述一个脉冲的相应车轮速度传感器的标识符。所传输的网络封包因此可以包括关于车轮速度检测的最小信息,即,由相应控制装置的区域本地时间提供的时间点以及可以简单地是唯一传感器编号的标识符。因此,车轮速度检测对网络封包和要传输的数据量的要求可能较低。然而,为了使用标准网络协议,可以扩展每个网络封包以包括相应协议所需的字节数。
28.所述多个控制装置中的至少一个控制装置可以被配置为从由所述至少一个车轮速度传感器提供的信号导出另外的量。该另外的量可以不同于车轮速度并且可以包括胎压。此外,多个控制装置中的至少一个可被配置为对不同于车轮速度传感器的至少一个另外的传感器或装置进行控制。也就是说,控制装置可以被配置为多功能装置,与需要用于单独控制各个传感器的附加装置的系统相比,这可以降低系统的成本。
29.在另一方面,本发明涉及一种包括如上所述的车轮速度检测系统的车辆。
30.该车辆还包括用于防抱死制动系统和用于电子稳定性程序的电子控制单元(abs/esp ecu),并且中央电子控制单元可以直接连接到abs/esp ecu。因此,通常可以避免abs/esp ecu与车轮速度传感器之间的直接电线连接。
附图说明
31.本文结合以下示意性示出的附图描述了本公开的示例性实施方式和功能:
32.图1示出了包括根据现有技术的车轮速度检测系统的车辆,并且
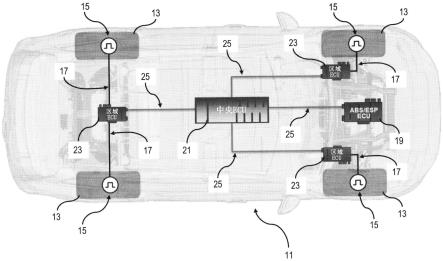
33.图2示出了包括根据本发明的车轮速度检测系统的车辆。
具体实施方式
34.图1示出了包括根据现有技术的车轮速度检测系统的车辆11。车辆11包括四个车轮13。每个车轮13配备有各自的车轮速度传感器15。四个车轮速度传感器15中的每一个车轮速度传感器具有有线连接17,该有线连接17将相应的车轮速度传感器15连接到防抱死制动系统(abs)和/或电子稳定程序(esp)电子控制单元19,即,连接到abs/esp ecu 19。
35.abs/esp ecu 19从相应的车轮速度传感器15接收信号并且处理这些信号以便为车辆的其他部件(例如abs和esp的部件)提供信息。通常,通过abs/esp ecu 19的车轮速度传感器15经由有线连接17提供模拟信号,该有线连接17延伸穿过车辆,例如作为车辆线束的一部分。尽管在车辆的线束中可以包括线路连接器,但是在如图1所示的信号链中不涉及其他电子控制单元(ecu)。尽管如图1所示的车轮速度检测系统的结构通常被认为是用于执行车轮速度检测的可靠解决方案,在整个车辆中的有线连接17在材料方面是昂贵的,并且在诊断和修理方面可能是具有挑战性的。
36.图2示出了包括根据本发明的车轮速度检测系统的车辆11。在该系统中,大大减少了有线连接17的使用。
37.除了图1所示的部件之外,图2所示的车轮速度检测系统包括中央电子控制单元(中央ecu)21和控制装置或区域ecu 23。每个控制装置或区域ecu 23经由相应的网络连接25连接到中央ecu 21。此外,每个区域ecu 23被分配给车辆11的预定区域并位于该区域中。此外,在中央ecu 21与abs/esp ecu 19之间提供网络连接25。在图2所示的实施方式中,提
供了三个区域ecu 23,每个区域ecu 23被分配给并通信地耦合到至少一个车轮速度传感器15。详细地,两个区域ecu 23分别被分配给单个车轮速度传感器15并联接到该单个车轮速度传感器15,即,联接到分别属于车辆11的右前轮13和左前轮13的相应车轮速度传感器15。相反,另一区域ecu 23被分配给两个轮速传感器15并连接到这两个轮速传感器15,即,分别属于车辆11的右后轮13和左后轮13的轮速传感器15。
38.区域ecu 23与相应的车轮速度传感器15的连接通过相应的有线连接17实现。由相应的区域ecu 23经由有线连接17从车轮速度传感器15接收到的信号在相应的区域ecu 23中被预处理。详细地,每个车轮旋转(wheel spin)的固定数量的脉冲被相应的车轮速度传感器15检测到,并且这些脉冲被相应的区域ecu 23作为模拟信号获取。各个区域ecu或控制装置23为每个脉冲生成网络封包(network package)。这样的网络封包包括相应的区域ecu 23检测到脉冲中的一个脉冲的时间点以及检测到相应脉冲的相应车轮速度传感器15的标识符(即,唯一传感器编号)。
39.网络连接25包括经由数字通信总线的连接,并且被配置为以太网连接,以便将网络封包从相应的区域ecu 23传送到中央ecu 21。中央ecu 21进一步处理从各个区域ecu 23接收到的网络封包,以便为车辆11的每个单独车轮13提供关于车轮速度的信息,例如以每分钟转数为单位。关于各个车轮速度的这个信息经由也被配置为以太网连接的另一网络连接25从中央ecu 21传送到abs/esp ecu 19。
40.为了适当地处理由中央ecu 21从各个区域ecu 23接收到的网络封包,在中央ecu 21与所有区域ecu 23之间需要同步。详细地,中央ecu 21提供中央时基,各个区域ecu 23所使用的本地时基与该中央时基周期性地同步。为了不影响abs/esp ecu 19中的abs/esp算法,中央ecu 21的中央主时钟与每个区域ecu 23中的相应时钟基准之间的最大允许时间差小于预定阈值。例如,时间差应当显著小于100μs。
41.为了执行同步,时钟控制封包(clock control package)从中央ecu 21周期性地传送到各个区域ecu 23。时钟控制封包包括由中央ecu 21的中央主时钟提供并由各个区域ecu 23用于同步的各个时间戳。将相应的时钟控制封包从中央ecu 21传送到每个区域ecu 23所需的时间被测量一次,并且假设在整个系统的运行期间是恒定的。针对各个区域ecu 23的同步,考虑各个时钟控制封包的传送时间。总之,最大允许时间差是指中央ecu 21的中央时基与区域ecu 23的相应本地时基之间的最大容许偏差。
42.对于图2中未示出的另选实施方式,车轮速度传感器15与相应的区域ecu 23之间的有线连接17可以由另外的网络连接25代替,即,由车轮速度传感器15与区域ecu 23之间的相应以太网连接代替。对于车轮速度传感器15与区域ecu 23之间的这些网络连接或以太网连接25,可以提供100mbit/s的数据传输速率,而区域ecu 23与中央ecu 21之间的以太网连接25的典型传输速率可以是至少1gbit/s。
43.区域ecu 23与中央ecu 21之间的网络连接的较高数据传输速率确保了网络封包从区域ecu 23到中央ecu 21的适当传输,而不增加将车轮速度信息从车轮速度传感器15传输到中央ecu 21的等待时间。详细地,这样的等待时间应该小于1ms。对于如图2所示的车轮速度检测系统(即,在车轮速度传感器15与区域ecu 23之间具有有线连接),并且对于根据在车轮速度传感器15与区域ecu 23之间具有以太网连接的另选实施方式的车轮速度检测系统,已经观察到传送车轮速度信息的小于1ms的范围内的最大延迟。即,通过使用适当的
测试装置从车轮速度传感器15到abs/esp ecu 19的脉冲。
44.在另一可选实施方式中,每个车轮速度传感器15可以被分配给相应的区域ecu23,使得在如图2所示的车辆11中,将提供四个区域ecu 23。换言之,对于本实施方式,在区域ecu 23与车轮速度传感器15或车轮13之间存在一对一的对应关系。此外,每个区域ecu 23可以物理地位于车辆11的四个区域之一内。
45.此外,区域ecu 23中的至少一个区域ecu还可以被配置成从由相应的车轮速度传感器15提供的信号中导出与车轮速度不同的另外的量,例如属于安装有该车轮速度传感器15的车轮13的胎压。此外,区域ecu 23还可以被配置成对不同于车轮速度传感器15的至少一个另外的传感器或装置进行控制。例如,区域ecu 23可以连接到被安装在相应的ecu 23被分配到的区域或部位中的相应雷达传感器(未示出)。即,ecu 23可以被配置为能够对安装在车辆11的与相应ecu 23相同的区域中的多个传感器或其他装置进行控制的多功能装置。
46.总之,对于如图2所示的实施方式以及对于仅使用网络连接25的另选实施方式,减少了关于有线连接17的要求。因此,可以简化车辆的线束,从而降低材料成本。此外,由于被分配给车辆11内的受限空间区域的区域ecu 23,简化了如图2所示的车轮速度检测系统的诊断和修理。详细地,由于网络封包,中央ecu 21已知从哪个相应区域ecu23和从哪个车轮速度传感器15提供了所考虑的网络封包。这有助于定位在来自车轮速度传感器15的信号中检测到的任何错误或故障。
47.附图标记列表
48.10、11
ꢀꢀ
车辆
49.13
ꢀꢀꢀꢀꢀ
车轮
50.15
ꢀꢀꢀꢀꢀ
车轮速度传感器
51.17
ꢀꢀꢀꢀꢀ
有线连接
52.19
ꢀꢀꢀꢀꢀ
用于防抱死制动系统和/或电子稳定程序的电子控制单元(abs/esp ecu)
53.21
ꢀꢀꢀꢀꢀ
中央电子控制单元
54.23
ꢀꢀꢀꢀꢀ
控制装置或区域ecu
55.25
ꢀꢀꢀꢀꢀ
网络或以太网连接
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1