一种用于充水采空区三维数据采集的声呐测量系统及方法与流程
1.本发明涉及采矿充水采空区、溶洞、工程施工桩基和沉箱等领域密闭充水空间的三维精确探测的声呐测量,是密闭充水空间的三维精确探测的新技术,尤其涉及的是一种用于充水采空区三维数据采集的声呐测量系统及方法。
背景技术:
2.我国幅员辽阔,地下赋存大量岩溶洞穴,同时资源开采留下巨量隐蔽采空区,这些封闭的地下隐藏空间对进一步的资源开采或者城市基建具有非常大的安全隐患,尤其是密闭充水空间的精确三维探测一直困扰着工程从业人员和科技工作者。
3.目前对地下隐藏密闭空间的探测,一般采用物探方法找到疑似空区,再结合钻机钻孔验证。钻机验证是空区,要么钻机继续钻探寻找空区的边界,进而估算空区的体量、尺寸;要么采用地下空区三维扫描仪,经钻孔进入无水空区对空区进行三维数据采集,确定空区的位置、边界和尺寸。但对于充水空区没有可行的精确测量方法。
4.钻机钻探的方法寻找空区边界、尺寸,一方面成本高、效率低,另外一方面没法准确测量采空区的尺寸、走向,对于顶板厚度(空区顶部距地表)较小的空区,钻机在上面钻探具有安全隐患。
5.相对于以上充水采空区探测方法,充水采空区三维数据采集的声呐测量系统的发明能够解决目前困扰密闭充水空间的三维精确探测的难题,提高探测精度,降低成本,避免安全隐患。
技术实现要素:
6.本发明所要解决的技术问题是针对现有技术的不足,提供一种用于充水采空区三维数据采集的声呐测量系统及方法。
7.本发明的技术方案如下:
8.一种用于充水采空区三维数据采集的声呐测量系统,包括声呐探棒、地面控制单元、数据处理单元、电源;声呐探棒内部集成声呐传感器、度盘、加速度计、陀螺仪和罗盘;声呐传感器在驱动电机驱动下旋转,声呐传感器发射声波对充水采空区做环状断面扫描,声呐接收机接收反射回的声波,发送到数据处理单元3经过处理把声呐获取的图象矢量化,输出最终的点云坐标(x,y,h);度盘用于计算声呐传感器旋转角度;陀螺仪用于测量声呐探棒的角速度wb,加速度计用于测量声呐探棒的比力fb;罗盘在系统初始化的时候测量声呐探棒的初始方位角;
9.所述数据处理单元中执行以下数据处理:
10.a1、根据陀螺仪测量的角速度wb和加速度计测量的比力fb,结合磁偏角、本地纬度以及罗盘测量的方位角(或外部输入的真方位角),修正输出roll、pitch和heading。
11.a2、根据输出的roll、pitch和heading,以及钻孔口坐标,把声呐获取的图象矢量化,输出最终的点云坐标(x,y,h)。
12.所述的用于充水采空区三维数据采集的声呐测量系统,声呐探棒外壳采用铝合金材质。
13.所述的用于充水采空区三维数据采集的声呐测量系统,声呐探棒长度509mm,通过供电/通讯电缆连接探棒,探棒可以通过钻孔顺利进入封闭充水采空区内部工作。
14.所述的用于充水采空区三维数据采集的声呐测量系统,声呐探棒上标识有0
°
度盘位置,声呐作业前陀螺初始化后,通过测量仪器测量出声呐探棒零基线方位角。
15.根据任一所述声呐测量系统的方法,在到达作业地后连接声呐系统并开机供电,根据所在区域,在数据处理单元3上设置磁偏角改正常数,将声呐探棒放入探测水中使设备温度接近环境温度;校准声呐驱动电机、罗盘、陀螺仪,选择作业模式,输入钻孔坐标,下放声呐探棒开始断面扫描,并实时记录下放点标高,数据处理单元3根据陀螺仪测量的角速度wb和加速度计测量的比力fb,结合磁偏角、本地纬度以及罗盘测量的方位角(或外部输入的真方位角),修正输出roll、pitch和heading。根据输出的roll、pitch和heading,以及钻孔口坐标,把声呐获取的图象矢量化,输出最终的点云坐标(x,y,h)。
16.本发明具有以下有益效果:
17.本发明声呐测量探棒通过钻孔(或者自然开口)进入密闭充水采空区(溶洞),通过计算机软件控制声呐探棒对采空区进行断面扫描,结合空间坐标概念,实时显示采空区三维空间点云轮廓,实现对充水采空区的空间定位、尺寸描述,体积计算等。
附图说明
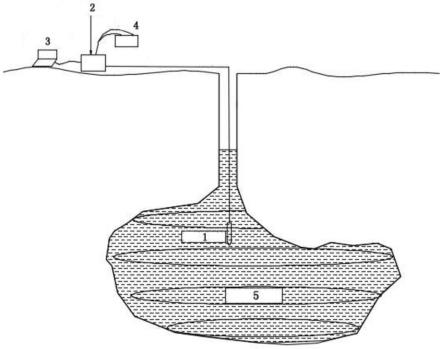
18.图1为声呐测量系统示意图;
19.图2为本发明声呐测量系统工作流程图;
20.1声呐探棒,2地面控制单元,3数据处理单元,4电源,5充水采空区;
具体实施方式
21.以下结合具体实施例,对本发明进行详细说明。
22.参考图1,一种用于充水采空区三维数据采集的声呐测量系统,包括声呐探棒1,地面控制单元2、数据处理单元3、电源4;
23.声呐探棒1内部集成声呐传感器、度盘、加速度计、陀螺仪和罗盘;声呐传感器和度盘在驱动电机驱动下旋转,声呐传感器发射声波对充水采空区做环状断面扫描,声呐接收机接收反射回的声波,发送到数据处理单元3经过处理把声呐获取的图象矢量化,输出最终的点云坐标(x,y,h);度盘用于计算声呐传感器旋转角度;
24.陀螺仪用于测量声呐探棒的角速度wb,加速度计用于测量声呐探棒的比力fb;罗盘在系统初始化的时候测量声呐探棒的初始方位角;
25.地面控制单元2用于为声呐探棒提供供电控制和通讯。
26.所述数据处理单元3中执行以下数据处理:
27.1、根据陀螺仪测量的角速度wb和加速度计测量的比力fb,结合磁偏角、本地纬度以及罗盘测量的方位角(或外部输入的真方位角),修正输出roll、pitch和heading。
28.2、根据输出的roll、pitch和heading,以及钻孔口坐标,把声呐获取的图象矢量
化,输出最终的点云坐标(x,y,h)。
29.为防止磁性干扰罗盘定向,探棒外壳采用铝合金材质。
30.声呐测量探棒通过钻孔(或者自然开口)进入密闭充水采空区(溶洞),通过计算机软件控制声呐探棒对采空区进行断面扫描,结合空间坐标概念,实时显示采空区三维空间点云轮廓,实现对充水采空区的空间定位、尺寸描述,体积计算等。
31.声呐探棒长度509mm,通过供电/通讯电缆连接探棒,探棒可以通过钻孔顺利进入封闭充水采空区内部工作。
32.声呐探棒上标识有0
°
度盘位置,声呐作业前陀螺初始化后,通过测量仪器测量出声呐探棒零基线方位角。
33.参考图2,本发明声呐测量系统工作流程图,在到达作业地后连接声呐系统并开机供电,根据所在区域,在数据处理单元3(即计算机软件)上设置磁偏角改正常数,将声呐探棒放入探测水中使设备温度接近环境温度;校准声呐驱动电机、罗盘、陀螺仪,选择作业模式,输入钻孔坐标,下放声呐探棒开始断面扫描,并实时记录下放点标高,数据处理单元3根据陀螺仪测量的角速度wb和加速度计测量的比力fb,结合磁偏角、本地纬度以及罗盘测量的方位角(或外部输入的真方位角),修正输出roll、pitch和heading。根据输出的roll、pitch和heading,以及钻孔口坐标,把声呐获取的图象矢量化,输出最终的点云坐标(x,y,h)。
34.重复以上步骤直至整个充水采空区扫描完毕。
35.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1