一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法
1.本发明属于水下目标跟踪领域,具体涉及一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法。
背景技术:
2.未来海洋战争将是高新技术条件下的战争,随着信息技术的发展和武器装备性能的不断提高,潜艇数量越来越多,机动性越来越强,战场环境越来越复杂。因此,海洋作战对潜艇目标跟踪的稳定性和跟踪精度提出了更高的要求。
3.21世纪以后,洛克希德马丁公司的mahler等学者提出了一种新的基于随机有限集(random finite sets,rfs)框架的概率假设密度滤波器。由于该算法由于在跟踪多目标时避开了复杂的数据关联,大大降低了计算复杂度,利用当前时刻得到的量测实时更新后验概率密度,能较为准确地估计得到多目标运动状态和目标数目等信息,受到了极大的关注。ba-ngu vo和ba-tuong vo在随机有限集统计理论下的多目标跟踪算法实现上做出了突出的贡献。由于随机有限集框架下的集值积分通常没有办法求解,一些采用等效近似策略的多目标滤波算法被提出,典型算法包括:基于一阶统计矩近似的概率假设密度滤波器,基于一阶统计矩和势近似的势概率假设密度滤波器,基于随机有限集密度近似的多目标多伯努利滤波器及其改进形式的势均衡多目标多伯努利滤波器。另外,为了估计目标形状,malher给出了扩展目标的概率假设密度滤波的预测更新公式。在此基础上,和orguner等人把随机矩阵引入扩展目标概率假设密度滤波中,对目标的形状进行了估计,进一步推动了扩展目标技术的发展。
4.上述基于随机有限集理论的多目标跟踪算法,尽管能避免复杂的数据关联过从而大大降低算法复杂度,但在目标跟踪过程中却无法给出具体的目标航迹,目标仍不可区分。
技术实现要素:
5.本发明提供一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,用以解决水下密集目标方位角交叉导致跟踪轨迹合并产生偏差的问题。
6.本发明通过以下技术方案实现:
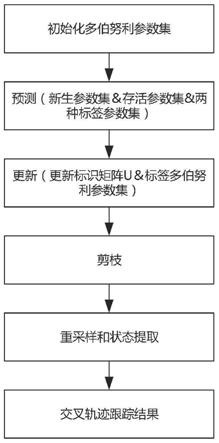
7.一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述水下目标跟踪轨迹临近交叉解决方法具体包括以下步骤:
8.步骤1:初始化多伯努利参数集;
9.步骤2:对水下目标分别建立运动模型和量测模型;
10.步骤3:基于步骤2的模型对水下目标进行预测,得到多伯努利预测参数集;
11.步骤4:将步骤3得到的多伯努利预测参数集,按存在概率进行更新得到更新后的标签多伯努利参数集;
12.步骤5:基于步骤4的更新后的标签多伯努利参数集,通过剪枝以挑选存在概率大
的有限个目标;
13.步骤6:基于步骤5的有限个目标,进行重采样对存在概率大的粒子进行复制以进行目标和杂波的明显区分;
14.步骤7:基于步骤6区分后的目标,形成跟踪轨迹。
15.一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤1初始化多伯努利参数集具体为,在初始时刻,多伯努利参数集为其中k为时刻,多伯努利参数集里的每一个状态分布p是由带权值的粒子组成。
16.一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤2对水下目标分别建立运动模型和量测模型具体为,目标运动模型设为
17.x
k+1
=fxk+w
k+1
18.量测模型为
19.z
k+1
=hx
k+1
+r
k+1
20.其中的w
k+1
和r
k+1
分别为预测过程和观测过程的噪声,均服从高斯分布,f和h均为状态转移矩阵,k为时刻。
21.一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤3基于步骤2的模型对水下目标进行预测,得到多伯努利预测参数集具体为,在预测步中,需要将lmb形式转换为δ-glmb形式,标签多伯努利随机集滤波器滤波器与多目标多伯努利滤波器的形式与运算均相同,对于存活目标进行预测,得到参数集和新生目标参数集其中r为概率,p为概率分布,分别对存活目标与新生目标计算损失因子-ln(r
(l)
/(1-r
(l)
)),通过k-最短路径算法选出ks个存活假设与kb个新生假设组合成个假设,分别记录存活目标标签以及参数集对应的假设权重由式下式得到
[0022][0023]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤4将步骤3得到的多伯努利预测参数集,按存在概率进行更新得到更新后的标签多伯努利参数集具体为,在更新步中,需要将lmb滤波的多目标预测概率密度函数转换成δ-glmb的形式进行更新,得到更新后的δ-glmb形式的后验概率密度;为了使lmb滤波的贝叶斯递归闭合,最后再将δ-glmb形式的后验概率密度近似为lmb形式。
[0024]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,建立更新标识矩阵u,将预测参数集中的目标按存在概率从大到小进行排序,依次进行更新;是目标的状态分布,由权值粒子组成;每个目标更
新后对u进行更新,将之前更新的粒子所对应的角度区间置1;更新后对预测的假设权重进行更新,最后重新计算目标存在概率与概率分布,得到更新后标签多伯努利参数集
[0025]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述更新具体包括以下步骤:
[0026]
步骤4.1:建立并初始化更新识别矩阵u;
[0027]
步骤4.2:基于步骤4.1的更新识别矩阵u,预测参数集目标概率从大到小排序,依次更新;
[0028]
步骤4.3:基于步骤4.2更新后的预测参数集目标,判断预测参数集目标是否存在概率大于门限r
th
,若是,则进行步骤4.4,若否则进行步骤4.8;
[0029]
步骤4.4:计算中心角度且将更新识别矩阵u中对应的区间置1,然后进行更新;
[0030]
步骤4.5:判断步骤4.4更新后的更新识别矩阵u是否为0;若为0,则进行步骤4.6,若不为0,则进行步骤4.7;
[0031]
步骤4.6:正常进行更新后将对应的更新识别矩阵u的区间置1;
[0032]
步骤4.7:粒子角度与中心角度差距过大,则用music空间谱的最小值作为似然比函数;
[0033]
步骤4.8:判断步骤4.3更新后的更新识别矩阵u是否为0;若为0,则进行步骤4.9,若不为0,则进行步骤4.10
[0034]
步骤4.9:正常进行更新后将对应的更新识别矩阵u的区间置1;
[0035]
步骤4.10:粒子角度与中心角度差距过大,则用music空间谱的最小值作为似然比函数
[0036]
步骤4.11:步骤4.6、步骤4.7、步骤4.9和步骤4.10均得到更新后标签多伯努利参数集。
[0037]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤5基于步骤4的更新后的标签多伯努利参数集,通过剪枝以挑选存在概率大的有限个目标具体为,在步骤3预测步骤中不断地有新生目标出现,导致目标数不断增加,根据概率从大到小排序后,设置门限删去后面的存在概率小的目标;设置存在概率门限以及目标数门限,当存在概率小于门限时删去该目标,当目标数大于门限时按存在概率进行排序,只取门限内的目标。
[0038]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,k时刻目标参数集为对应的目标新生参数集为k+1时刻预测的目标参数集如下式所示
[0039][0040]
由上式可知,预测参数集分为两部分,一部分是已存在的目标,用s表示,其中代表预测的k+1时刻目标存在概率,表示对应的概率分布,k表示
时刻,l为该目标的标签,表示由l组成的离散可数空间;
[0041]
在得到预测后的lmb参数集后,需要转换为δ-glmb形式,设有ns个存活目标与nb个新生目标,则存在种假设,选取权重最大的有限个假设进行保留:分别对存活目标与新生目标计算损失因子-ln(r
(l)
/(1-r
(l)
)),通过k-最短路径算法选出ks个存活假设与kb个新生假设组合成个假设,分别根据以下两式计算对应假设的权重与概率分布:
[0042][0043][0044]
ξ表示对应的假设,i为跟踪标签的集合。
[0045]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤6:基于步骤5的有限个目标,进行重采样对存在概率大的粒子进行复制以进行目标个杂波的明显区分具体为,将目标存在概率从大到小排列,选出概率最大的门限内目标并进行重采样:对每个目标的粒子集根据粒子权重重新采样得到等权值粒子集l表示当前时刻存在的粒子数,然后计算势分布并从计算得到的势分布中估计目标数,根据下式计算势分布。
[0046][0047]
其中为m
k+1
个变量的n次初等对称函数。估计目标数方式如下
[0048][0049]
本发明的有益效果是:
[0050]
本发明有效改善了传统算法目标存在着合并、分裂,难以维持稳定航迹的情况,提高了跟踪轨迹的精准度,连续性,降低了跟踪误差,减小了计算量。
[0051]
本发明在方位角交叉的情况下也能实现对目标进行连续不间断的跟踪,无跟丢、误跟、误新生、轨迹跑偏和目标数估计错误的情况发生。
[0052]
本发明形成的轨迹清晰完整且连续、目标数估计准确、响应速度快,可将其应用于被动声纳目标跟踪、探潜、探导等领域。
附图说明
[0053]
图1是本发明的方法步骤流程图。
[0054]
图2是本发明的跟踪滤波结果示意图。
[0055]
图3是本发明的选择性更新示意图。
具体实施方式
[0056]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实
施例,都属于本发明保护的范围。
[0057]
首先在预测阶段通过k-最短路径算法选出ks个存活假设与kb个新生假设组合成个假设,然后在更新阶段建立更新标识矩阵u,将预测参数集中的目标按存在概率从大到小进行排序,依次进行更新。
[0058]
假定接收信号的声纳阵列为线阵,假设信号与噪声相互独立,对music谱估计结果固定门限进行搜峰,music谱估计结果为检测前跟踪算法的输入。可以得知在点迹测量下,标签多伯努利分布族不是共轭先验的,即后验分布不服从先验分布的形式,又已知广义标签多伯努利分布族已证明是共轭先验的,可以在预测后将lmb形式转换为glmb形式,使用glmb形式进行预测更新后再转换回lmb形式。相当于利用标签多伯努利滤波器逼近广义标签多伯努利滤波器。在进行轨迹更新时,考虑目标轨迹交叉时跟踪常出现的情况:跟丢、错跟、轨迹断裂等情况。不考虑目标a正好在目标b轨迹上新生而发生的交叉情况,量测方位角范围为[0,360),设定最小区分角度δθ,将量测范围分为n
θ
个区间,用长度为n
θ
的更新标识矩阵u表示,同时设定存在概率门限r
th
,在进行更新前将u清零,对所有目标按存在概率r
(l)
排序,p
(l)
为概率分布,l为该目标标签。存在概率大于r
th
的目标先计算中心角度,在u中将对应的角度区间置为1,然后进行更新,整体流程图如图1所示。
[0059]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述水下目标跟踪轨迹临近交叉解决方法具体包括以下步骤:
[0060]
步骤1:初始化多伯努利参数集;
[0061]
步骤2:对水下目标分别建立运动模型和量测模型;
[0062]
步骤3:基于步骤2的模型对水下目标进行预测,得到多伯努利预测参数集;
[0063]
步骤4:将步骤3得到的多伯努利预测参数集,按存在概率进行更新得到更新后的标签多伯努利参数集;
[0064]
步骤5:基于步骤4的更新后的标签多伯努利参数集,通过剪枝以挑选存在概率大的有限个目标;
[0065]
步骤6:基于步骤5的有限个目标,进行重采样对存在概率大的粒子进行复制以进行目标和杂波的明显区分;
[0066]
步骤7:基于步骤6区分后的目标,形成跟踪轨迹。
[0067]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤1初始化多伯努利参数集具体为,在初始时刻,多伯努利参数集为其中k为时刻,多伯努利参数集里的每一个状态分布p是由带权值的粒子组成。
[0068]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤2对水下目标分别建立运动模型和量测模型具体为,目标运动模型设为
[0069]
x
k+1
=fxk+w
k+1
[0070]
量测模型为
[0071]zk+1
=hx
k+1
+r
k+1
[0072]
其中的w
k+1
和r
k+1
分别为预测过程和观测过程的噪声,均服从高斯分布,f和h均为
状态转移矩阵,k为时刻。
[0073]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤3基于步骤2的模型对水下目标进行预测,得到多伯努利预测参数集具体为,在预测步中,需要将lmb形式转换为δ-glmb形式,标签多伯努利随机集滤波器(lmb)滤波器与多目标多伯努利(multi-target multi-bernoulli,member)滤波器的形式与运算均相同,对于存活目标进行预测,得到参数集和新生目标参数集其中r为概率,p为概率分布,分别对存活目标与新生目标计算损失因子-ln(r
(l)
/(1-r
(l)
)),通过k-最短路径算法选出ks个存活假设与kb个新生假设组合成个假设,分别记录存活目标标签以及参数集对应的假设权重由式下式得到
[0074][0075]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤4将步骤3得到的多伯努利预测参数集,按存在概率进行更新得到更新后的标签多伯努利参数集具体为,在更新步中,需要将lmb滤波的多目标预测概率密度函数转换成δ-glmb的形式进行更新,得到更新后的δ-glmb形式的后验概率密度;为了使lmb滤波的贝叶斯递归闭合,最后再将δ-glmb形式的后验概率密度近似为lmb形式。
[0076]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,建立更新标识矩阵u,将预测参数集中的目标按存在概率从大到小进行排序,依次进行更新;是目标的状态分布,由权值粒子组成;每个目标更新后对u进行更新,将之前更新的粒子所对应的角度区间置1;更新后对预测的假设权重进行更新,最后重新计算目标存在概率与概率分布,得到更新后标签多伯努利参数集具体步骤流程图如图3所示。
[0077]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,提出的一个更新标识矩阵,也是本专利所提出的采用一种辅助性门限进行选择性更新方法的重点所在。传统的方法在目标靠近时会进行合并操作,本发明没有合并操作步骤,而是利用这个更新标识矩阵进行有选择的更新从而区分轨迹交叉时的不同目标。本发明中的步骤4.1—4.10步骤均是在看这个矩阵u中是1还是0从而进行操作;所述更新具体包括以下步骤:
[0078]
步骤4.1:建立并初始化更新识别矩阵u;
[0079]
步骤4.2:基于步骤4.1的更新识别矩阵u,预测参数集目标概率从大到小排序,依次更新;
[0080]
步骤4.3:基于步骤4.2更新后的预测参数集目标,判断预测参数集目标是否存在概率大于门限r
th
,若是,则进行步骤4.4,若否则进行步骤4.8;
[0081]
步骤4.4:计算中心角度且将更新识别矩阵u中对应的区间置1,然后进行更新;
[0082]
步骤4.5:判断步骤4.4更新后的更新识别矩阵u是否为0;若为0,则进行步骤4.6,若不为0,则进行步骤4.7;
[0083]
步骤4.6:正常进行更新后将对应的更新识别矩阵u的区间置1;
[0084]
步骤4.7:粒子角度与中心角度差距过大,则用music空间谱的最小值作为似然比函数;
[0085]
步骤4.8:判断步骤4.3更新后的更新识别矩阵u是否为0;若为0,则进行步骤4.9,若不为0,则进行步骤4.10
[0086]
步骤4.9:正常进行更新后将对应的更新识别矩阵u的区间置1;
[0087]
步骤4.10:粒子角度与中心角度差距过大,则用music空间谱的最小值作为似然比函数
[0088]
步骤4.11:步骤4.6、步骤4.7、步骤4.9和步骤4.10均得到更新后标签多伯努利参数集。
[0089]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤5基于步骤4的更新后的标签多伯努利参数集,通过剪枝以挑选存在概率大的有限个目标具体为,在步骤3预测步骤中不断地有新生目标出现,导致目标数不断增加,根据概率从大到小排序后,设置门限删去后面的存在概率小的目标;设置存在概率门限以及目标数门限,当存在概率小于门限时删去该目标,当目标数大于门限时按存在概率进行排序,只取门限内的目标。
[0090]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,k时刻目标参数集为对应的目标新生参数集为k+1时刻预测的目标参数集如下式所示
[0091][0092]
由上式可知,预测参数集分为两部分,一部分是已存在的目标,用s表示,其中代表预测的k+1时刻目标存在概率,表示对应的概率分布,k表示时刻,l为该目标的标签,表示由l组成的离散可数空间。
[0093]
在得到预测后的lmb参数集后,需要转换为δ-glmb形式,设有ns个存活目标与nb个新生目标,则存在种假设,为了避免这种指数增长的计算量,需要根据假设权重分别对存活假设和新生假设进行截断,选取权重最大的有限个假设进行保留:分别对存活目标与新生目标计算损失因子-ln(r
(l)
/(1-r
(l)
)),通过k-最短路径算法选出ks个存活假设与kb个新生假设组合成个假设,分别根据以下两式计算对应假设的权重与概率分布。
[0094][0095][0096]
ξ表示对应的假设,i为跟踪标签的集合。
[0097]
一种基于标签多伯努利检测前跟踪算法的水下目标跟踪轨迹临近交叉解决方法,所述步骤6:基于步骤5的有限个目标,进行重采样对存在概率大的粒子进行复制以进行目
标和杂波的明显区分具体为,将目标存在概率从大到小排列,选出概率最大的门限内目标并进行重采样:对每个目标的粒子集根据粒子权重重新采样得到等权值粒子集l表示当前时刻存在的粒子数,然后计算势分布并从计算得到的势分布中估计目标数,根据下式计算势分布。
[0098][0099]
其中为m
k+1
个变量的n次初等对称函数。估计目标数方式如下
[0100][0101]
下面对交叉轨迹进行跟踪。目标信号为窄带信号,频率为1450hz。目标信号的输入信噪比恒定为-16db,采样频率为20khz。利用music谱估计方法得到探测结果。目标方位角轨迹发生两次交叉,然后用本发明基于标签多伯努利检测前跟踪算法的跟踪轨迹临近交叉解决方法对输入数据进行目标跟踪。
[0102]
图1是本发明方法步骤流程图。
[0103]
图2是本发明基于标签多伯努利检测前跟踪算法交叉轨迹跟踪滤波结果。红色直线表示真实目标方位角轨迹,上面不同颜色的点表示跟踪结果。基于本发明的算法即使在低信噪比也能连续的对目标进行有效的跟踪,并且轨迹清晰,目标数明确。
[0104]
图3是本发明的选择性更新示意图,即图一中的“更新”部分具体步骤。综上所述,本发明提出的密集目标方位角轨迹交叉水下弱目标跟踪方法通过对目标进行选择性更新,减小计算量的同时实现了对目标标签的准确更新,对目标的探测和谱估计是基于music算法并采用粒子实现,通过搜峰和控制门限获得目标最大概率存在的位置,将实跟踪结果轨迹与理论实际结果轨迹对比即可验证本发明的跟踪算法的性能,进而形成可持续、准确、完整的多目标跟踪航迹。本发明合理利用每个时刻检测出的目标的概率,对目标的位置和个数进行高精度的估计,减少目标跟踪丢失次数,并实现目标轨迹的整体上完整性提高,实现对视频中的多目标进行的有效地检测和跟踪。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1