针对稀疏数据的航天器目标机动检测方法
1.本发明涉及航天器技术领域,尤其涉及一种针对稀疏数据的航天器目标机动检测方法。
背景技术:
2.随着航天技术的发展和国际形势的变化,围绕空间资源的争夺、空间目标的打击等空间攻防对抗行为的空间战争,逐步成为了各个航天强国追逐的焦点。卫星作为一种有效的空间探测手段,在现代信息化战争中正发挥着越来越重要的作用,对敌方卫星的有效拦截可以对敌方通讯系统造成严重破坏,从而在信息化战争中占据有利地位。
3.一般来说,对卫星的拦截过程可分为初制导、中制导和末制导三个环节,中制导的作用在于将拦截器导引到目标卫星附近,使得导引头开机后能够捕获到目标,从而转入末制导过程。在传统的拦截中制导过程中,一般假设目标卫星是不机动的,或者能够通过观测设备实时获得目标数据信息,从而在目标进行机动躲避后,拦截器能够及时检测并相应地调整拦截轨道以击中目标。但在一些特殊场景下(如拦截高轨道目标),受限于观测能力、数据传输能力等,拦截器在中制导过程中只能获得较为稀疏的目标数据信息,导致传统的方法无法直接应用。此外,在实际应用中,导航误差是必然存在的。综上,为了拦截器能够及时调整拦截轨道以顺利进入末制导,设计考虑导航误差和稀疏数据影响的目标机动检测算法具有重要意义。
技术实现要素:
4.本发明所要解决的技术问题是如何提供一种能够适用于只能获得稀疏目标信息数据的场景,并为在该场景中成功拦截机动目标提供帮助的航天器目标机动检测方法。
5.为解决上述技术问题,本发明所采取的技术方案是:一种针对稀疏数据的航天器目标机动检测方法,其特征在于包括如下步骤:
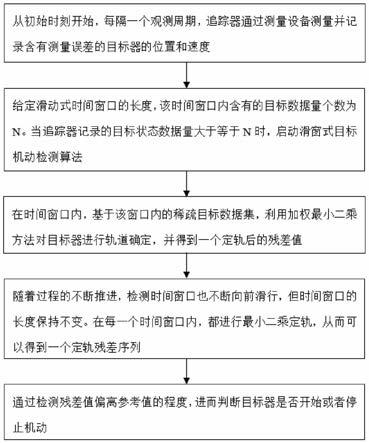
6.1)从初始时刻开始,每隔一个观测周期,追踪器通过测量设备测量并记录含有测量误差的目标器状态值;
7.2)给定滑动式时间窗口的长度,该时间窗口内含有的目标数据量个数为n,当追踪器记录的目标状态数据量大于等于n时,启动滑窗式目标机动检测算法;
8.3)在检测时间窗口内,基于该窗口中的稀疏目标数据集,利用加权最小二乘方法对目标器进行轨道确定,并得到一个定轨后的残差值;
9.4)随着过程的不断推进,检测时间窗口也不断向前滑行,但时间窗口的长度保持不变,在每一个时间窗口内,重复步骤3)的流程,得到一个定轨残差时间序列;
10.5)基于步骤4)得到的定轨残差时间序列,通过检测残差值偏离参考值的程度,进而判断目标器是否开始或者停止机动。
11.进一步的,在步骤1)中,追踪器通过测量设备测量得到目标器状态值,该状态值是以j2000地心惯性坐标系下的位置和速度矢量形式给出的,其中含有测量误差。
12.进一步的,在步骤3)中,采用加权最小二乘方法对目标进行定轨,其中权值取为各个观测量的测量误差分布标准差,定轨的残差选为加权均方根wrms,即
[0013][0014]
其中,δxi、δyi和δzi分别表示第i个数据点处定轨后的位置矢量三个分量的偏差,δv
x,i
、δv
y,i
和δv
z,i
则分别表示第i个数据点处定轨后的速度矢量三个分量的偏差,σ
x
、σy和σz分别表示位置矢量三个分量的测量误差的标准差,分别表示位置矢量三个分量的测量误差的标准差,和分别表示速度矢量三个分量的测量误差的标准差,这些标准差的值是预先给定的;所有测量到的目标器位置、速度信息均是在j2000地心惯性坐标系下给出的;此外,在最小二乘定轨的迭代过程中,初值选为当前时刻的测量值,迭代终止条件为wrms的变化率小于给定阈值,即
[0015][0016]
其中,wrms
old
表示上一步的定轨残差,wrms
new
表示当前步的定轨残差,∈为预先给定的阈值。
[0017]
进一步的,在步骤5)中,根据wrms的定义可知,当n趋于无穷时,wrms的值接近1,因此,wrms的参考值设为1,由于进行最小二乘定轨时,目标是假设为不进行机动的,当定轨所用的数据点数目合适且在该时间段内目标不进行机动时,定轨残差wrms的值会在1附近波动;当定轨期间目标进行了机动,wrms的值会偏离参考值1,且随着目标机动程度的增大,wrms的值偏离参考值1的程度也会随之增大;当wrms的值偏离参考值1的程度大于给定阈值时,则认为检测到目标进行了机动;类似地,当wrms的值从偏离参考值1的程度大于给定阈值到逐渐接近参考值,则认为检测到目标停止了机动。
[0018]
采用上述技术方案所产生的有益效果在于:本发明所述方法通过检测残差值偏离参考值的程度来对目标航天器进行机动检测,包括检测目标器是否开始或者停止轨道机动,能够在只能获得机动目标稀疏观测数据的情况下对目标进行机动检测,从而为该场景下拦截机动目标提供帮助。
附图说明
[0019]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0020]
图1是本发明实施例所述方法的流程图;
[0021]
图2是本发明实施例所述方法中观测残差变化曲线图。
具体实施方式
[0022]
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0023]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
[0024]
如图1所示,本发明公开了一种针对稀疏数据的航天器目标机动检测方法,所述方法包括如下步骤:
[0025]
步骤1):从初始时刻开始,每隔一个观测周期,追踪器通过测量设备测量并记录含有测量误差的目标器状态值(位置、速度)。
[0026]
步骤2):给定滑动式时间窗口的长度,该时间窗口内含有的目标数据量个数为n。当追踪器记录的目标状态数据量大于等于n时,启动滑窗式目标机动检测算法。
[0027]
步骤3):在检测时间窗口内,基于该窗口中的稀疏目标数据集,利用加权最小二乘方法对目标器进行轨道确定,并得到一个定轨后的残差值。
[0028]
步骤4):随着过程的不断推进,检测时间窗口也不断向前滑行,但时间窗口的长度保持不变。在每一个时间窗口内,重复步骤三的流程,从而可以得到一个定轨残差时间序列。
[0029]
步骤5):基于步骤四得到的定轨残差时间序列,通过检测残差值偏离参考值的程度,进而判断目标器是否开始或者停止机动。
[0030]
下面结合具体实施方式对上述方法进行说明:
[0031]
在步骤1)中,追踪器通过测量设备测量得到目标器状态值,该状态值是以j2000地心惯性坐标系下的位置和速度矢量形式给出的,其中含有测量误差。此外,观测周期和测量误差分布是由观测设备能力决定的。
[0032]
在步骤2)中,检测时间窗口长度的选择非常关键,长度过大,包含的目标数据点个数较多,会导致检测算法对目标机动的灵敏度降低,造成较大的检测时间延迟;长度过小,包含的目标数据点个数较少,会导致对目标定轨的残差普遍偏大,从而造成虚警概率增大,即目标未机动但检测算法却误判目标进行了机动,导致追踪器进行不必要的轨道调整。
[0033]
在步骤3)中,考虑到观测数据具有不同的精度,本技术采用加权最小二乘方法对目标进行定轨,其中权值取为各个观测量的测量误差分布标准差,定轨的残差选为加权均方根wrms,即
[0034][0035]
其中,δxi、δyi和δzi分别表示第i个数据点处定轨后的位置矢量三个分量的偏差,δv
x,i
、δv
y,i
和δv
z,i
则分别表示第i个数据点处定轨后的速度矢量三个分量的偏差,σ
x
、σy和σz分别表示位置矢量三个分量的测量误差的标准差,分别表示位置矢量三个分量的测量误差的标准差,和分别表示速度矢量三个分量的测量误差的标准差,这些标准差的值是预先给定的。所有测量到的目标器位置、速度信息均是在j2000地心惯性坐标系下给出的。此外,在最小二乘定轨的迭代过程中,初值选为当前时刻的测量值,迭代终止条件为wrms的变化率小于给定阈值,即
[0036][0037]
其中,wrms
old
表示上一步的定轨残差,wrms
new
表示当前步的定轨残差,∈为预先给定的阈值。
[0038]
在步骤4)中,对于每一个机动检测时间窗口[t
l
,tr],其右端时刻tr始终与当前时刻保持一致,左端时刻由给定的时间窗口长度决定。
[0039]
在步骤5)中,根据wrms的定义可知,当n趋于无穷时,wrms的值接近1。因此,wrms的参考值设为1。由于进行最小二乘定轨时,目标是假设为不进行机动的,当定轨所用的数据点数目合适且在该时间段内目标不进行机动时,定轨残差wrms的值会在1附近波动;当定轨期间目标进行了机动,wrms的值会偏离参考值1,且随着目标机动程度的增大,wrms的值偏离参考值1的程度也会随之增大。当wrms的值偏离参考值1的程度大于给定阈值时,则认为检测到目标进行了机动。类似地,当wrms的值从偏离参考值1的程度大于给定阈值到逐渐接近参考值,则认为检测到目标停止了机动。
[0040]
设初始时刻目标器在j2000地心惯性坐标系下的位置和速度矢量为:
[0041][0042]
假设目标器动力学模型为二体模型。目标器的机动加速度大小为0.03g,其中g为地球海平面重力加速度。假设目标器从2000s开始机动,机动加速度一直沿着轨道的周向方向,机动时长为1400s。
[0043]
目标器的测量误差假设为均值为0的高斯分布误差,位置测量误差的标准差为2/3km,速度测量误差的标准差为5m/s。目标器的测量周期设为50s,即每50s测量一次目标器的位置速度。
[0044]
调整检测时间窗口的长度使其含有8个目标测量数据。在每一个检测时间窗口内,利用加权最小二乘方法对目标进行定轨迭代,迭代的终止条件设为wrms的变化率小于0.001。
[0045]
在上述条件下,采用本专利的方法,随着检测时间窗口的不断滑行,得到的定轨残差wrms值的变化如图2所示,其中横坐标为当前时刻,即检测时间窗口的右端时间,纵坐标为每一个检测时间窗口内经过加权最小二乘定轨后的残差wrms的值。从图中可以明显地看出,目标器存在一次从开始机动到停止机动的过程。在机动检测过程中,wrms的参考值设为1,检测的阈值设为0.5,即当wrms的值从小于1.5变化到大于1.5时,认为目标进行了机动;而当wrms的值从大于1.5变化到小于1.5时,认为目标停止了机动。最终检测到的目标器发动机开机和关机的时间区间分别为[2100,2150]s和[3600,3650]s,可以看出对目标机动检测存在一定的时间延迟,延迟的时间大概为2~5个测量周期。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1