一种通过测距传感器进入高温灭菌柜的导航与定位方法
1.本发明涉及agv导航与定位方法,特别涉及一种一种通过测距传感器进入高温灭菌柜的导航与定位方法,属于工业自动化技术领域。
背景技术:
2.近年来agv在工业环境中广泛应用,对与食用菌工厂这种农业属性领域来说应用较少。
3.食用菌行业除了托盘搬运以外,难点在于高温灭菌柜。传统方式主要人工驾驶叉车搬运。人工搬运需要等待高温蒸汽消散。
4.agv有多种导航方式,包括激光导航,色带二维码,磁导航等,均需要布置对应的标记,由于高温蒸汽灭菌柜超过120度的高温高湿环境,激光靶标,二维码色带靶标,磁带等均会腐蚀,金属材料又面临蒸汽附着,污损等一系类问题。同时,由于菌菇厂托盘众多,改造成本较高,自动化运行要保持极高的精度。为解决以上问题,本发明提出了一种一种通过测距传感器进入高温灭菌柜的导航与定位方法。
技术实现要素:
5.本发明的目的在于提供一种一种通过测距传感器进入高温灭菌柜的导航与定位方法,以解决上述背景技术中提出的为了解决在狭长高温高湿的灭菌柜环境中,无法布置导航靶标进行agv的定位与导航的问题。
6.具体包括以下步骤:
7.一种通过测距传感器进入高温灭菌柜的导航与定位方法,包括以下步骤:
8.s1:系统初始化,读取标定参数;
9.s2:采集4个测距传感器数据模拟量转换;
10.s3:对各采集数据数据中值滤波处理;
11.s4:计算车体中心点与侧壁的角度偏差值;
12.s5:计算车体中心与至车前部墙面的垂直距离;
13.s6:根据车体中心点与侧壁的角度偏差值调整agv姿态;
14.s7:车体中心与至车前部墙面的垂直距离未达到设定位置重复s2-s7;
15.s8:车体中心与至车前部墙面的垂直距离符合设定条件,反馈完成,agv停止;
16.4个测距传感器包括放置于agv车体左侧的1个测距传感器、agv车体右侧的2个测距传感器和1个放置于agv前部的测距传感器。
17.优选地,通过4个测距传感器,计算车体在灭菌柜中的左右角度偏差,与高温灭菌柜中轴线角度偏差以及距离前方高温灭菌柜墙壁距离。
18.本发明工作原理为:
19.agv进入高温灭菌柜之后,agv通过左右两侧三个测距传感器,计算出agv相对于灭菌柜两侧侧壁中轴线偏差以及角度偏差,进行agv相应的姿态调整。agv前部测距传感器主
要测量agv至前部墙面距离,并结合其余三个传感器计算agv中心至墙面的垂直距离,以此判断agv的停止条件。解决了在狭长高温高湿的灭菌柜环境中,无法布置导航靶标进行agv的定位与导航的问题。
附图说明
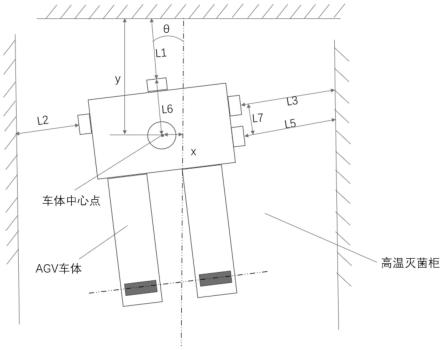
20.图1导航系统示意图;
21.图2为系统导航结构示意图;
22.图3为系统运行流程图。
具体实施方式
23.对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.图1为导航系统示意图,其中l1为前部激光测距传感器到墙面距离,l2为左侧前部激光测距传感器到左侧灭菌柜挡板距离,l3为右侧前部激光测距传感器到右侧灭菌柜挡板距离,l5为左侧后部激光测距传感器到左侧灭菌柜挡板距离,l6为车体中心至前部激光测距传感器平面距离,l7为两个测距传感器之距。
25.θ为车体角度,x为车体中心到灭菌柜轴线距离,y为车体中心到灭菌柜前部墙体距离。
26.图2系统导航结构示意图,如图所示,agv车体的左侧放置1个激光测距传感器,右侧放置两个激光测距传感器,前面放置一个激光测距传感器。
27.图3为系统运行流程图,初次使用时系统需要标定,正式运行时,系统首先读取标定参数,采集4个激光测距传感器数据并进行中值滤波,计算车体相对于灭菌柜中轴线的角度误差与距离偏差,同时计算agv与前面墙体的距离判断agv的停止条件。
28.如图1所示,系统包括4个激光测距传感器,左侧放置一个,右侧放置两个。前部放置一个。通过测量侧壁和墙面距离调整姿态,不需要进行任何靶标的布置。通过两侧激光自动适应调整中轴中心距离,保证灭菌柜尺寸变化后的中轴距离。
29.其中l1为前部激光测距传感器到墙面距离,l2为左侧前部激光测距传感器到左侧灭菌柜挡板距离,l3为右侧前部激光测距传感器到右侧灭菌柜挡板距离,l5为左侧后部激光测距传感器到左侧灭菌柜挡板距离,l6为车体中心至前部激光测距传感器平面距离,l7为两个测距传感器之距。
30.θ为车体与灭菌柜中轴线角度偏差,x为车体中心到灭菌柜轴线距离偏差,y为车体中心到灭菌柜前部墙体距离。
[0031][0032]
x=(l3-l2)
[0033]
y=(l1+l6)*cosθ
[0034]
系统通过右侧两个激光器获得的距离数据可以激光车体在密闭灭菌柜中的角度偏差θ。结合前部激光测距传感器可以计算出车体距离前部墙面的垂直距离y,通过左侧和
右侧传感器可以计算车体中心与灭菌柜中轴线的左右偏差距离x。
[0035]
当x数值大于0时agv向左偏转,当x数值小于0时agv向右偏转。
[0036]
y为agv到前部墙面距离的设定停止距离。当y值大于y时,agv停止执行系统相对应的动作。
[0037]
基于多传感器测距的自动导航方法,包括以下步骤;
[0038]
s1:系统初始化,读取标定参数
[0039]
s2:采集4个测距传感器数据模拟量转换
[0040]
s3:对各采集数据数据中值滤波处理
[0041]
s4:计算车体中心点与侧壁的角度偏差值
[0042]
s5:计算车体中心与至车前部墙面的垂直距离
[0043]
s6:根据车体中心点与侧壁的角度偏差值调整agv姿态
[0044]
s7:车体中心与至车前部墙面的垂直距离未达到设定位置重复s2-s7
[0045]
s8:车体中心与至车前部墙面的垂直距离符合设定条件,反馈完成,agv停止。
[0046]
agv进入灭菌柜之后,agv通过左右两侧三个测距传感器,计算出agv相对于灭菌柜两侧侧壁中轴线偏差以及角度偏差,进行agv相应的姿态调整。agv前部测距传感器主要测量agv至前部墙面距离,并结合其余三个传感器计算agv中心至墙面的垂直距离,以此判断agv的停止条件。
[0047]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
[0048]
本发明使用到的标准零件均可以从市场上购买,异形件根据说明书的记载均可以进行订制。
[0049]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1