机器人地图创建方法以及相关设备与流程
本技术实施例涉及机器人,尤其涉及机器人地图创建方法以及相关设备。
背景技术:
1、近年来,在餐饮业规模不断扩大的同时,餐饮业服务人员却面临严重短缺,送餐机器人应运而生。相较于服务员,送餐机器人的送餐效率更高,且长期使用成本更低。
2、现在机器人运行需要依赖于完整的地图,而获得完整地图首先需要基于现有的建图工具进行原始地图创建,然后通过电脑端的安装工具在原始地图中进行不同业务功能的业务点设置以得到完整地图。
3、但业务点的设置需要技术人员上门操作,用户无法自行通过电脑端的安装工具在原始地图中进行不同业务功能的业务点设置。技术人员无法随时进行上门操作,且技术人员上门操作也需要花费大量时间进行业务点的设置,导致机器人地图创建成本较高。
技术实现思路
1、本技术实施例提供了机器人地图创建方法以及相关设备。
2、本技术实施例第一方面提供一种机器人地图创建方法,包括:
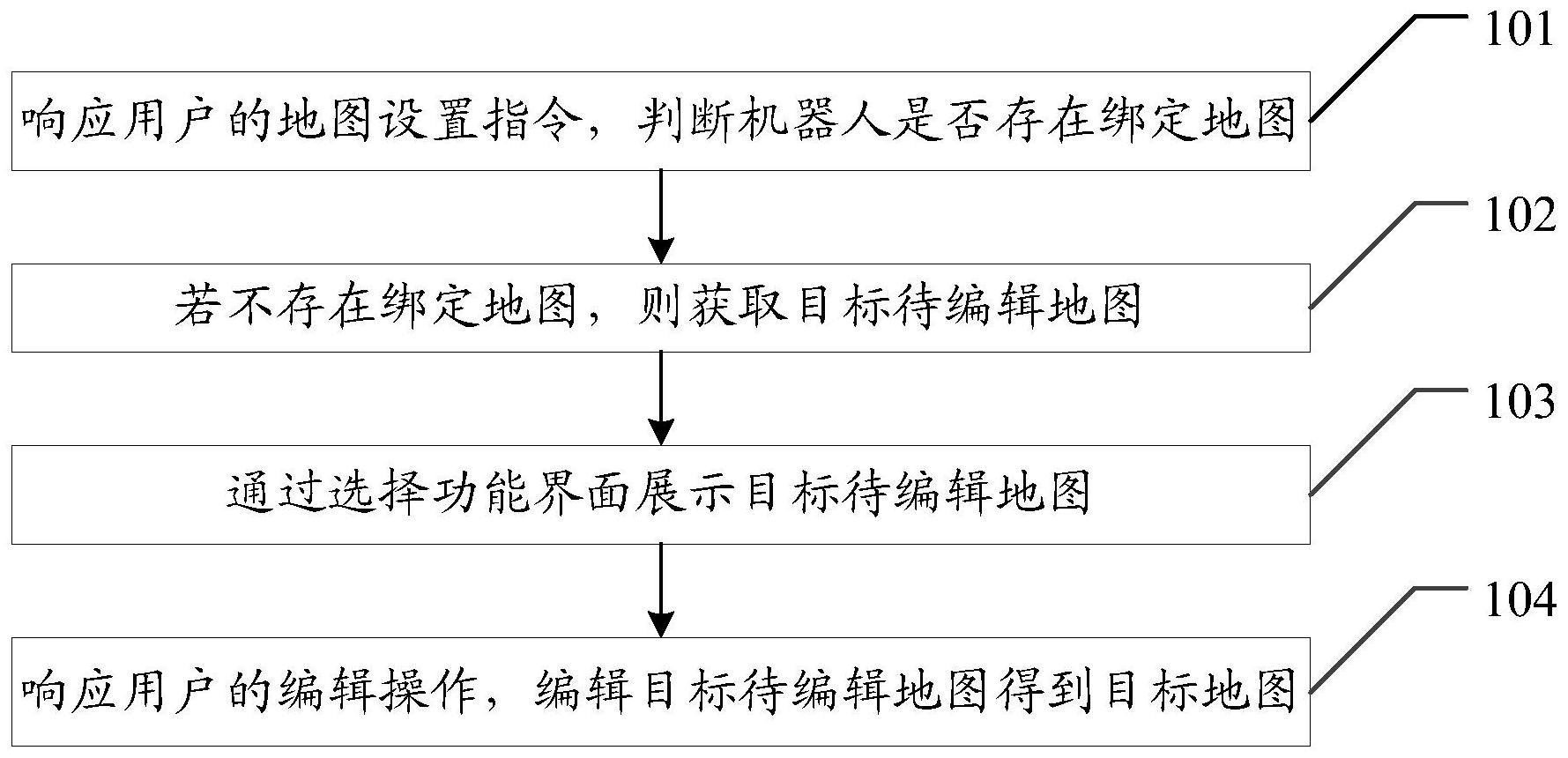
3、响应用户的地图设置指令,判断机器人是否存在绑定地图;
4、若不存在绑定地图,则获取目标待编辑地图;
5、通过选择功能界面展示所述目标待编辑地图;
6、响应用户的编辑操作,编辑所述目标待编辑地图得到目标地图。
7、在一种具体实现方式中,在所述判断机器人是否存在绑定地图之前,所述方法还包括:
8、响应用户的开机操作,对所述机器人进行初始化处理;若完成所述初始化处理,则生成所述地图设置指令;
9、或,
10、响应用户选择地图设置控件的操作,生成所述地图设置指令。
11、在一种具体实现方式中,所述获取目标待编辑地图,包括:
12、展示地图选择界面,确定所述用户基于地图选择界面选择的待编辑地图为目标待编辑地图。
13、在一种具体实现方式中,所述获取目标待编辑地图,包括:
14、从所述机器人的至少一个相机中确定目标相机,并通过所述目标相机获取环境信息以创建待编辑地图;
15、确定所述目标相机创建的待编辑地图为目标待编辑地图。
16、在一种具体实现方式中,所述响应用户的编辑操作,编辑所述目标待编辑地图,包括:
17、获取用户基于所述选择功能界面编辑的业务点或虚拟墙为目标编辑操作;
18、根据所述目标编辑操作编辑所述目标待编辑地图。
19、在一种具体实现方式中,所述响应用户的编辑操作,编辑所述目标待编辑地图,包括:
20、判断所述目标待编辑地图每条路径的路径宽度是否大于预设宽度;
21、若是,则获取用户基于所述选择功能界面编辑的双车道;
22、根据所述用户编辑的双车道编辑所述目标待编辑地图。
23、本技术实施例第二方面提供一种机器人地图创建装置,包括:
24、判断单元,用于响应用户的地图设置指令,判断机器人是否存在绑定地图;
25、获取单元,用于若不存在绑定地图,则获取目标待编辑地图;
26、展示单元,用于通过选择功能界面展示所述目标待编辑地图;
27、编辑单元,用于响应用户的编辑操作,编辑所述目标待编辑地图得到目标地图。
28、在一种具体实现方式中,所述装置还包括:生成单元;
29、所述生成单元,用于响应用户的开机操作,对所述机器人进行初始化处理;若完成所述初始化处理,则生成所述地图设置指令;
30、或,
31、所述生成单元,用于响应用户选择地图设置控件的操作,生成所述地图设置指令。
32、在一种具体实现方式中,所述获取单元,具体用于展示地图选择界面,确定所述用户基于地图选择界面选择的待编辑地图为目标待编辑地图。
33、在一种具体实现方式中,所述获取单元,具体用于从所述机器人的至少一个相机中确定目标相机,并通过所述目标相机获取环境信息以创建待编辑地图;确定所述目标相机创建的待编辑地图为目标待编辑地图。
34、在一种具体实现方式中,所述编辑单元,具体用于获取用户基于所述选择功能界面编辑的业务点或虚拟墙为目标编辑操作;根据所述目标编辑操作编辑所述目标待编辑地图。
35、在一种具体实现方式中,所述编辑单元,具体用于判断所述目标待编辑地图每条路径的路径宽度是否大于预设宽度;若是,则获取用户基于所述选择功能界面编辑的双车道;根据所述用户编辑的双车道编辑所述目标待编辑地图。
36、本技术实施例第三方面提供一种机器人,所述机器人包括存储器和与所述存储器连接的处理器,所述存储器存储有可执行程序代码,所述处理器执行所述计算机可读指令时实现如下步骤:
37、响应用户的地图设置指令,判断机器人是否存在绑定地图;
38、若不存在绑定地图,则获取目标待编辑地图;
39、通过选择功能界面展示所述目标待编辑地图;
40、响应用户的编辑操作,编辑所述目标待编辑地图得到目标地图。
41、在一种具体实现方式中,所述处理器在执行判断机器人是否存在绑定地图的步骤之前,所述处理器还用于执行如下步骤:
42、响应用户的开机操作,对所述机器人进行初始化处理;若完成所述初始化处理,则生成所述地图设置指令;
43、或,
44、响应用户选择地图设置控件的操作,生成所述地图设置指令。
45、在一种具体实现方式中,所述处理器在执行所述获取目标待编辑地图的步骤时,具体包括如下步骤:
46、展示地图选择界面,确定所述用户基于地图选择界面选择的待编辑地图为目标待编辑地图。
47、在一种具体实现方式中,所述处理器在执行所述获取目标待编辑地图的步骤时,具体包括如下步骤:
48、从所述机器人的至少一个相机中确定目标相机,并通过所述目标相机获取环境信息以创建待编辑地图;
49、确定所述目标相机创建的待编辑地图为目标待编辑地图。
50、在一种具体实现方式中,所述处理器在执行所述响应用户的编辑操作,编辑所述目标待编辑地图的步骤时,具体包括如下步骤:
51、获取用户基于所述选择功能界面编辑的业务点或虚拟墙为目标编辑操作;
52、根据所述目标编辑操作编辑所述目标待编辑地图。
53、在一种具体实现方式中,所述处理器在执行所述响应用户的编辑操作,编辑所述目标待编辑地图的步骤时,具体包括如下步骤:
54、判断所述目标待编辑地图每条路径的路径宽度是否大于预设宽度;
55、若是,则获取用户基于所述选择功能界面编辑的双车道;
56、根据所述用户编辑的双车道编辑所述目标待编辑地图。
57、本技术实施例第四方面提供一种机器人地图创建装置,包括:
58、中央处理器,存储器以及输入输出接口;
59、所述存储器为短暂存储存储器或持久存储存储器;
60、所述中央处理器配置为与所述存储器通信,并执行所述存储器中的指令操作以执行第一方面所述的方法。
61、本技术实施例第五方面提供一种计算机存储介质,所述计算机存储介质中存储有指令,所述指令在计算机上执行时,使得所述计算机执行第一方面所述的方法。
62、从以上技术方案可以看出,本技术实施例具有以下优点:可以获取用户确定的目标待编辑地图,并响应用户对目标待编辑地图的编辑操作得到目标地图,无需技术人员上门操作,用户便可以进行业务点的设置并完成地图创建,降低了机器人地图创建的成本。
- 还没有人留言评论。精彩留言会获得点赞!