传感元件的制作方法
1.本发明涉及一种用于确定流体中的冲击波的物理特性的传感元件以及一种用于确定流体中的冲击波的物理特性的方法。
背景技术:
2.冲击波或压力波可以在介质(例如流体)中传播。流体是气体或液体。在下文中,使用术语“冲击波”代表压力波或冲击波。
3.冲击波会出现在很多情况下。流体中的突然膨胀与从膨胀点扩散开的冲击波有关。例如,通过流体从开口中的快速逸出能够发生膨胀;例如,当活塞在气缸中运动时,可以通过固体的快速运动来触发冲击波,例如快速排空充满流体的空间或者通过出口填充先前大部分空置的空间。膨胀还可以是在流体中的膨胀。同样,流体中的内爆(implosion)也与冲击波的传播有关。
4.冲击波可以在空间中不受阻碍地传播。冲击波也可以被定向地传播,例如在空心柱体中的轴内传播。
5.冲击波具有通过流体传播的冲击波阵面(stosswellenfront)。在此,膨胀之后的冲击波阵面相对于未受影响的流体具有压力上升。内爆后的冲击波阵面相对于未受影响的流体具有压力下降。下面仅描述冲击波阵面为压力上升的冲击波的情况。然而,本领域技术人员可以将本发明的以下描述相应地适配于具有压力下降的冲击波阵面。
6.在固定位置处,可以将冲击波确定为瞬时压力。在下文中,“瞬时”始终是指时间上的瞬时。因此,瞬时压力是作为时间函数的压力。传播经过该位置的冲击波可以被确定为达到最大压力的压力上升,然后是压力下降。
7.冲击波具有多种物理特性。冲击波具有最大压力。冲击波具有随时间变化的压力上升,表现为从不受影响的流体的压力上升到最大压力。冲击波具有波阵面(wellenfront)。在所述压力上升具有拐点时的位置处定义波阵面。替代地,也可以在压力达到不受影响流体的压力与最大压力之间一半高度时的位置处定义波阵面。冲击波具有衰减时间,该衰减时间在压力从最大压力下降到最大压力的某一比例时的位置处被定义。冲击波具有冲击波速度,冲击波阵面通过流体以该冲击波速度运动。冲击波具有冲击波加速度。通常,冲击波阵面的速度会随着行进距离的增加而减小。因此,大多数情况下冲击波加速度是负的。然而需要指出的是,在下文中明确包括了正冲击波加速度。
8.专利文献us2799788a公开了一种用于确定冲击波的瞬时压力的传感元件。该传感元件具有沿纵轴线配置的主体,该主体具有鼻部和测量部。为了测量冲击波的瞬时压力,传感元件被定向为以纵轴线垂直于冲击波阵面。鼻部邻接于测量部设置并且沿着纵轴线逐渐变细直至鼻端。由此避免了冲击波阵面的涡流/或扭曲。涡流或扭曲会引起局部的压力变化,并且不能正确地确定冲击波的瞬时压力。在测量部中布置有压力传感器,其具有横向于纵轴线的压敏式压力采集表面。在排除比例因子之后,横向压力(也称为横向过渡压力)等于冲击波的瞬时压力。这里的不利之处在于,既不能确定冲击波速度,也不能确定冲击波加
速度。
技术实现要素:
9.因此,本发明的目的是提供一种传感器,利用该传感器,能够简单、有效地确定冲击波的瞬时压力和冲击波加速度以及冲击波速度。
10.该目的通过本发明的技术方案来实现。
11.本发明涉及一种用于确定流体中的冲击波的横向过渡压力的传感元件,其包括沿纵轴线配置的主体;该主体具有鼻部;该主体具有测量部;其中鼻部被布置为邻接测量部;其中鼻部从测量部出发沿着纵轴线逐渐变细直至鼻端;其中测量部具有至少三个压力传感器;其中压力传感器具有压敏式压力采集表面;其中所述至少三个压力传感器中的每一个压力传感器的压力采集表面平行于纵轴线布置;并且其中,所述至少三个压力传感器沿着纵轴线彼此间隔开地布置。
12.传感元件被布置为以纵轴线平行于冲击波的预期传播方向。主体具有鼻部,该鼻部被布置为面向冲击波。鼻部被设计为逐渐地压缩冲击波,以便能够使由于在冲击波的运动流体流过传感元件时的这种逐渐压缩所造成的对冲击波的扭曲和伴随而来的对冲击波的压力的局部干扰最小化。由此使得该传感元件适用于测量冲击波的横向过渡压力而不会被过度干扰。
13.通过采用至少三个沿纵轴线布置的压力传感器,使得仅利用一个传感元件就能够容易地确定冲击波的多个物理特性,因为可以彼此独立地确定至少三个瞬时压力作为压力信号。压力传感器沿着纵轴线的间距是已知的。所述至少三个瞬时压力信号在沿着冲击波的传播方向彼此间隔开的压力传感器的压力采集表面的位置处被确定。根据每个压力信号的上升确定冲击波阵面的时间位置(zeitliche position)。确定至少三个冲击波阵面之间的时间差。由此,根据传播时间,即通过三个压力传感器中的每个压力传感器确定冲击波阵面之间的时间差,可以确定冲击波速度。同样,根据至少三个冲击波阵面之间的时间差和已知的压力采集表面沿纵轴线的间距,可以确定冲击波加速度。
附图说明
14.下面参照附图示例性地对本发明进行详细阐述。其中:
15.图1为传感元件的一种实施方式的局部示意图,
16.图2为传感元件的另一种实施方式的局部示意图,
17.图3为根据图1的传感元件的实施方式的另一局部示意图,
18.图4为根据图1的传感元件的实施方式的另一局部示意图,
19.图5为所确定的压力信号的示意图,
20.图6为传感元件的另一实施方式的局部示意图,
21.图7为具有采集单元(aufnahmeeinheit)的传感元件的另一实施方式的局部示意图。
22.其中,附图标记列表如下:
23.1 传感元件
24.100 传感装置
25.11 电子单元
26.12 扁平部
27.121 弦
28.13 电缆
29.14 采集单元
30.15 压电式加速度测量元件
31.17 压电式压力测量元件
32.2 主体
33.3 鼻部
34.31 鼻端
35.4 测量部
36.5 压力传感器
37.6 压力采集表面
38.70a,70b,70c 压力信号
39.7a,7b,7c 压力
40.80a,80b,80c 加速度信号
41.8a,8b,8c 加速度
42.9 冲击波
43.a9 加速度, 冲击波加速度
44.dab,dbc 间距
45.p 压力
46.t 时间
47.ta,tb,tc 时间
48.tab,tac,tbc 时间差
49.v9 速度
50.w 传播方向
51.x 纵轴线
52.xa,xb,xc 位置
具体实施方式
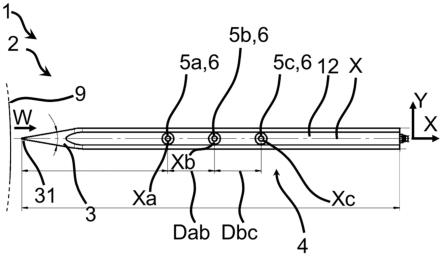
53.图1示出了用于确定冲击波9的横向过渡压力的传感元件1的一种实施方式。该传感元件包括沿纵轴线x配置的主体2。主体2具有鼻部3。主体2具有测量部4。鼻部3被布置为邻接于测量部4。鼻部3从测量部4出发沿着纵轴线x逐渐变细直至鼻端31。传感元件、特别是鼻部3的这种构型是有利的,因为撞上来的冲击波在流过传感元件时被逐渐压缩。因此避免了冲击波的涡流和扭曲。
54.根据本发明,测量部4具有至少三个压力传感器5a、5b、5c。该至少三个压力传感器5a、5b、5c中的每一个均具有压敏式压力采集表面6。作用在压力采集表面上的压力通过压力传感器来确定。所述至少三个压力传感器5a、5b、5c中的每一个压力传感器的压力采集表面6均被布置为平行于纵轴线x。因此,在冲击波沿着传感元件的纵轴线运动时所确定的压
力被称为横向压力,也被称为瞬时横向压力或者横向过渡压力。所述至少三个压力传感器5a、5b、5c沿着纵轴线x彼此间隔开布置。这样做的优点在于:可以在沿着冲击波传播方向的三个不同且明确定义的位置处测量冲击波的传播。因此,例如可以随着冲击波的传播时间或传播距离的增加来确定冲击波的最大压力的降低。
55.优选地,将所述至少三个压力传感器5a、5b、5c中的每一个设计为,确定作用在相应压力采集表面6上的瞬时压力7a、7b、7c并将其作为压力信号70a、70b、70c来提供。所确定的压力信号70a、70b、70c的示意图在图5中示出。至少三个压力信号用于进一步分析冲击波的物理特性。
56.特别优选地,将至少三个压力传感器5a、5b、5c中的每一个压力传感器设计为,确定作用在相应压力采集表面6上的瞬时压力7a、7b、7c,并且附加地将至少三个压力传感器5a、5b、5c中的每一个压力传感器设计为,独立于作用在压力采集表面6上的压力7a、7b、7c地确定相应压力传感器5a、5b、5c的加速度8a、8b、8c。在这种情况下,传感元件1具有电子单元11,如图6所示。电子单元11布置在测量部中。电子单元11产生所确定的瞬时压力与所确定的加速度的分量(anteil)的差作为压力信号70a、70b、70c,并且提供该压力信号。这是有利的,因为暴露于冲击波下的压力传感器通常也会承受加速度。但是,在压力传感器5a、5b、5c中也可能有加速度在起作用,因为压力传感器的各个构件或者测量元件本身也会作为振动质量体起作用并在加速期间在测量元件上施加力。因此,压力传感器5a、5b、5c的加速度也可以产生一信号,该信号可能被误解为压力信号70a、70b、70c。因此,压力传感器5a、5b、5c被有利地设计为检测加速度8a、8b、8c并补偿由此引起的信号。这在电子单元11中进行。在最简单的情况下,电子单元是两个导体的导电连接。压力传感器的加速度补偿及其工作原理例如在专利文献ep0902267a2或wo06131015a2中有说明。
57.在一种实施方式中,鼻部3被构造为相对于纵轴线x基本旋转对称。鼻部沿着纵轴线x的长度是鼻部在垂直于纵轴线的截面中的最大直径的至少三倍(例如,鼻部沿着纵轴线x的长度比鼻部在垂直于纵轴线的截面中的最大直径大至少三倍)。这具有以下优点:冲击波在撞击到鼻部3的鼻端31上时只是沿着鼻部的整个长度被逐渐地压缩。通过这种逐渐地改变鼻部的直径避免了扭曲和涡流。
58.在根据图1和图3的实施方式中,鼻部3被构造为锥形的。
59.在另一实施方式中,鼻部3在平行于纵轴线x的截面中具有橄榄形的横截面,如图2所示。这种构型在飞行体或漂浮体领域中是已知的,当其运动穿过流体时应该是具有非常小的阻力。在本文中,术语“橄榄”是指尖锐的、流线形的旋转体。
60.测量部4被构造为沿着纵轴线基本为圆柱形的。测量部4因此被无缝地且无突起地连接到鼻部3。这是有利的,因为在突起的区域中可能会出现冲击波9的涡流或扭曲。
61.在一种实施方式中,主体2具有扁平部12。扁平部12在垂直于纵轴线x的横截面中具有弦121的形状,如图4所示。扁平部12是平的并且至少部分地沿着纵轴线x延伸且与纵轴线x间隔开,如图2所示。至少三个压力传感器5a、5b、5c的相应压力采集表面6平行于扁平部12布置。这样做的优点是:主体2在测量部3的区域中没有突起。这是有利的,因为在突起的区域中会出现冲击波9的涡流或扭曲。在一种实施方式中,至少三个压力传感器5a、5b、5c的压力采集表面6与扁平部平齐(plan)。
62.在另一种实施方式中,至少三个压力传感器5a、5b、5c的压力采集表面6沿纵轴线x
的方向从扁平部12回撤地布置。在该实施方式中,主体2在测量部3的区域中也没有突起。这是有利的,因为在突起的区域中会出现冲击波9的涡流或扭曲。然而,由于压力采集表面沿纵轴线x的方向会受到较小的剪切力,因此将压力采集表面沿纵轴线x的方向向后移位提供了对压力采集表面的保护。
63.在另一种未示出的实施方式中,压力采集表面涂有柔性保护层。该柔性保护层例如是乙烯基层(vinylschicht)。乙烯基层可以是不透明的。这对于将压力采集表面构造为薄壁膜的情况是特别有利的。“薄壁”被理解为小于0.2mm的厚度。柔性保护层保护布置在膜后面的压力测量元件免受环境影响,例如过度的热辐射。例如,如果冲击波伴随有电磁波,例如在红外线区域中,则电磁波可能会在压力测量元件中产生信号,该信号可能被误解为压力信号。柔性保护层可以使该问题最小化。
64.在一种优选的实施方式中,至少三个压力传感器5a、5b、5c中的每一个压力传感器具有至少一个压电式压力测量元件17;压力测量元件17与压力采集表面6处于有效连接中。当作用在压力采集表面上的压力传递到压力测量元件17上时,压力测量元件17与压力采集表面处于有效连接中,并且压力测量元件由此被设计为检测压力作为物理参量。压电式压力测量元件由压电材料制造。压电材料例如是石英、硅酸镓镧(la3ga5sio
14
)、原磷酸镓(gapo4)、铌酸锂(linbo3)、钽酸锂(litao3)、磷酸铝(alpo4)、黄玉、电气石族矿物质和钛酸铅(pbtio3)。特别优选地,在压力测量元件17的一种实施方式中是石英。石英是鲁棒且相对廉价的。压电材料在力作用在表面上时会产生压电电荷,这些压电电荷可以在电荷放大器中被检测为电荷信号。压电材料在测量技术中是很受欢迎的,因为压电材料具有很高的固有频率并且因此能够检测到力的快速变化,直至达到晶体的固有频率。因此,它们非常适合于快速过程,例如确定流体中的冲击波的瞬时压力7a、7b、7c。具有压电式压力测量元件17的压力传感器5a、5b、5c的典型固有频率高达300khz.
65.所述至少三个压力传感器5a、5b、5c中的每一个压力传感器具有至少一个压电式加速度测量元件15。该加速度测量元件15被设计为,独立于作用在相应压力采集表面6上的瞬时压力7a、7b、7c地确定压力传感器1的加速度8a、8b、8c。如前所述的,由此可以补偿压力测量元件的由加速度8a、8b、8c引起的信号。在该应用中,压电式加速度元件也具有上述的优点。
66.鼻部3被有利地构造为流线型的。鼻部3被设计为,撞击在鼻部3上的冲击波9在其沿着纵轴线x移动时被逐渐地压缩。由此,有利地避免了冲击波的扭曲或涡流。
67.主体2由金属或金属合金制成。金属和金属合金具有高抗性。传感元件1因此能抵抗冲击波9造成的损坏。
68.传感元件1也可以具有所描述各种实施方式的特征。例如,鼻部的构型能够容易地与压力测量元件的选择相结合。
69.传感元件1用于确定冲击波9的物理特性。传感元件1的纵轴线x基本上平行于冲击波9的传播方向w定向。鼻端31具有与冲击波9的传播方向w相反的方向。传感元件1确定至少三个瞬时压力7a、7b、7c并将其作为压力信号70a、70b、70c提供。“提供信号”应理解为所提供的信号可供另一应用使用。“提供”还包括将信号存储在电子存储器上并从该存储器加载信号。“提供”还包括在显示器上显示信号的选项。
70.采集单元14将所提供的三个压力信号70a、70b、70c进行比较。采集单元14借助所
述至少三个压力信号70a、70b、70c的时间序列(ta、tb、tc)确定至少一个冲击波速度v9并提供该冲击波速度。冲击波速度是由所走过的距离和所经过的时间的商来确定,其中所走过的距离是两个压力传感器5a、5b、5c的两个压力采集表面6之间的距离,所经过的时间是在相应的压力传感器上所确定的冲击波阵面91的时间差。在图7中示出了采集单元14。
71.采集单元14借助冲击波阵面91撞击在至少三个压力传感器5a、5b、5c上的时间序列ta、tb、tc来确定冲击波加速度a9。冲击波加速度a9是基于所述三个压力信号70a、70b、70c来确定并提供。为此,首先如上所述地确定冲击波9在第一压力传感器5a与第二压力传感器5b之间的速度v9。然后,确定冲击波在第二压力传感器5b与第三压力传感器5c之间的速度v9。根据这两个所确定的速度v9的变化,能够确定冲击波9的加速度a9。加速度a9可以是正的或负的。负的加速度a9被称为减速度。
72.传感装置100包括传感元件1、电缆13和采集单元14。电缆13将传感元件1与采集单元14导电连接。所提供的压力信号70a、70b、70c通过电缆13从传感元件1传输到采集单元14。传感元件1被设计为检测至少三个压力信号70a、70b、70c。此外,采集单元14被设计为比较至少三个压力信号70a、70b、70c。
73.下面描述用于确定冲击波9的物理特性的方法。该方法包括确定至少三个瞬时压力7a、7b、7c作为压力信号70a、70b、70c。在沿着冲击波9的传播方向w彼此间隔开的位置xa、xb、xc处确定至少三个瞬时压力信号70a、70b、70c。根据每个压力信号70a、70b、70c的上升来确定冲击波阵面91的时间位置ta、tb、tc。确定至少三个冲击波阵面之间的时间差tab、tac、tbc。时间差tab、tac、tbc是冲击波阵面91撞击在所述三个位置xa、xb、xc其中一个位置到冲击波阵面撞击在所述三个位置xa、xb、xc的其中另一个位置之间的时间差。冲击波9的速度v9也被称为冲击波速度v9,其是基于至少三个所确定的冲击波阵面91之间的时间差tab、tac、tbc来确定的。
74.通过冲击波加速度a9和冲击波速度v9连同已知的瞬时压力的确定,能够实现对冲击波的全面表征。
75.在用于确定冲击波9的物理特性的方法中,优选地利用传感元件1来确定至少三个压力信号70a、70b、70c并提供。在此,传感元件1的纵轴线如前所述地被布置为平行于冲击波9的传播方向w。
76.可以以各种方式确定冲击波阵面9。在该方法的一种实施方式中,是在压力信号70a、70b、70c的上升的瞬时压力7a、7b、7c达到最大压力信号70a、70b、70c一半的时间点上确定冲击波阵面91。在该方法的另一种实施方式中,是在上升的瞬时压力7a、7b、7c具有拐点的时间点上确定冲击波阵面9。通过这两种实施方式,可以确定冲击波9的速度v9和加速度a9。
77.此外,在具有压电式压力传感元件17的传感元件1的一种实施方式中,电子单元11被构造为电荷放大器,如图6所示。这具有以下优点:压电电荷不必通过电缆13传输到外部的采集单元14。在电荷的传输中,对电缆13有至少10
10
欧姆的高绝缘要求。如果电子单元11具有电荷放大器,则可以容易地选择长电缆。这简化了传感装置100,因为可以将采集单元14放置在距冲击波安全距离处。
78.传感元件被设计为,确定最大1000psi或大约69巴的压力。传感元件被设计为,能够承受最大5000psi或大约350巴的压力而不受损伤。
79.在本文中公开的方法或传感元件1的实施方式当然可以相互结合。在本文中也明确包括了具有在此所述实施方式的特征的组合的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1