1.本发明涉及光学测量技术领域,尤其是涉及一种无支持域约束的相位恢复波前检测方法。
背景技术:2.相位恢复波前检测是近年来方兴未艾的一种新型非干涉式波前探测方法,基于计算光学成像原理,直接通过焦斑能量分布计算反演出波前信息,结构简单,无需形成干涉条纹,适用于大相对孔径、高陡度的波前检测。
3.如公开号为cn112629678a的中国专利文献公开了一种通用形状无衍射迭代计算的快速相位恢复方法,该方法通过将待测波前使用数值正交多项式模式分解,然后对每一项数值正交多项式基于快速傅里叶变换计算衍射基函数,然后在衍射面之间利用矩阵运算迭代求解系数梯度,实现了高速通用形状的波前检测。
4.公开号为cn110470245a的中国专利文献公开了一种基于菲涅尔波带片衍射信息融合的相位恢复方法,该方法使用由菲涅尔波带片调制的衍射光强分布进行恢复,能够实现对待测波前更宽频段的重建。
5.相位恢复被广泛应用到光学检测、成像、自适应光学等领域,但其本身是一个逆数学问题尚有各种未解决的难题,相位恢复在光学领域的应用以及不同领域之间的相互促进,形成了在实践中不断解决理论问题,理论进展应用到实践中去的正反馈迭代过程。
6.相位恢复模型是在目标域和傅里叶域之间建立迭代过程,通过测量的衍射强度来恢复波前相位,即最经典的gs算法。后来,fienup对gs算法进一步研究发展出er算法和hio算法,并应用于哈勃望远镜的像差矫正中。这些算法对于支持域要求是比较严格,不精确已知的支持域将会降低算法的收敛性能。在现实实际场景中,支持域很难精确测定。
技术实现要素:7.本发明提供了一种无支持域约束的相位恢复波前检测方法,以解决传统相位恢复波前检测方法对于支持域要求高、但支持域难以精准测定造成的波前重建精度降低的问题,可以提高波前重建精度。
8.一种无支持域约束的相位恢复波前检测方法,应用于光强图像采集场景,在激光器的出射光路上依次布置有扩束器、待测平板、会聚透镜、图像传感器,该方法包括以下步骤:
9.s1:移动图像传感器,在不同的离焦距离采集n幅含有待测平板波前误差的离焦衍射光斑;
10.s2:分别设置会聚透镜的焦距f、口径d、波长λ,每一幅离焦衍射光斑的离焦位置zk,优化步长为h
phase
,测量面初始的复振幅gs(x,y)设置为全一矩阵;
11.s3:设置图像传感器的像素大小δdu×
δdv及像素数m0×
n0,对采集到的第j幅衍射光斑进行裁剪、归一化处理,获取维度为m
×
m的有效光斑
12.s4:基于标量衍射理论,将测量面初始的复振幅gs(x,y)衍射计算到第j个离焦面,得到第j个离焦面的衍射光场,公式为:
[0013][0014]
并用s3处理后得到的第j幅有效光斑做振幅替换,得到振幅替换后的衍射光场
[0015]
s5:对于第j个离焦面,使用第k个离焦面的衍射光斑进行相位梯度计算,k≠j,并对估计得到的复振幅的相位进行优化,得到优化后的衍射光场公式为:
[0016][0017]
s6:将s5计算得到的第j个离焦面衍射计算到下一个离焦面第j’个离焦面,公式为:
[0018][0019]
并做符号替换j
′
=j,并用s3处理的后的衍射光斑做振幅替换
[0020][0021]
s7:迭代次数t加1,重复步骤s5~s6,直到t≥t,t表示迭代总数;
[0022]
s8:从第j个离焦面,将s5计算得到的优化后的衍射光场逆衍射回待测波前面,得到重建的光场。
[0023]
进一步地,步骤s3中,采用质心法对采集到的第j幅衍射光斑进行裁剪。
[0024]
步骤s4中,所述的标量衍射理论为菲涅尔衍射。
[0025]
步骤s4中,用s3处理后得到的第j幅有效光斑做振幅替换的公式为:
[0026][0027]
式中,arg[ ]代表取相位操作,为振幅替换后的衍射光场。
[0028]
步骤s4中,第j个离焦面为第1个离焦面。
[0029]
步骤s5中,进行相位梯度计算的目标函数为:
[0030][0031]
式中,和是和ij(u,v)的归一化强度,是用第k个衍射面衍射光斑计算得到的第j个离焦面的衍射光斑强度值;w
jk
(u,v)是权重参数,用以去除低信噪比值像素点。
[0032]
步骤s5中,进行相位梯度计算的方法为:
[0033][0034]
式中,im[]代表取虚部,通过下式计算
[0035][0036][0037]
式中,δz
jk
是第j个衍射面和第k个衍射面之间的距离,g
jk
(u,v)表示第k个衍射面衍射光斑计算得到的第j个离焦面的的复振幅。
[0038]
步骤s8中,计算重建的光场公式为:
[0039][0040]
式中,δz
1j
是第1个衍射面和第j个衍射面之间的距离。
[0041]
与现有技术相比,本发明具有以下有益效果:
[0042]
本发明直接在衍射面迭代计算重建相位,不需要支持域约束即可实现高精度的波前重建,迭代波前重建方法与非线性优化算法相结合加速波前相位重建过程,无序使用衍射光斑将加速算法收敛过程。
附图说明
[0043]
图1为本发明实施例中一种无支持域约束的相位恢复波前检测方法的装置示意图;
[0044]
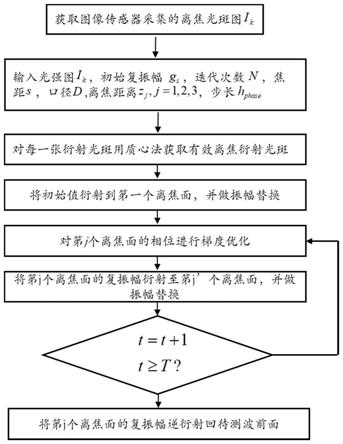
图2为本发明实施例中一种无支持域约束的相位恢复波前检测方法的流程图;
[0045]
图3为实施例中应用本发明方法的恢复结果图。
具体实施方式
[0046]
下面结合附图和实施例对本发明做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
[0047]
如图1所示,作为一种光强图采集实例,在激光器1的出射光路上依次布置有扩束器2、待测平板3、会聚透镜4、图像传感器5,图像传感器5固定在精密导轨6上。
[0048]
如图2所示,一种无支持域约束的相位恢复波前检测方法,包括以下步骤:
[0049]
s1:移动图像传感器,在不同的离焦距离采集n幅含有待测平板波前误差的离焦衍射光斑。
[0050]
s2:分别设置会聚透镜的焦距f、口径d、波长λ,每一幅离焦衍射光斑的离焦位置zk,优化步长为h
phase
,测量面的初始解gs(x,y)设置为全一矩阵。
[0051]
s3:设置图像传感器的像素大小δdu×
δdv及像素数m0×
n0,对采集到的第j幅衍射光斑基于质心法进行裁剪、归一化处理,获取维度为m
×
m的有效光斑
[0052]
s4:基于菲涅尔衍射理论,将测量面的初始解gs(x,y)衍射计算到第1个离焦面,得到第1个离焦面的衍射光场,公式为:
[0053][0054]
并用s3处理后得到的第j幅有效光斑做振幅替换,得到振幅替换后的衍射光场公式为:
[0055][0056]
式中,arg[ ]代表取相位操作。
[0057]
s5:对于第j个离焦面,使用第k个离焦面的衍射光斑进行相位梯度计算,k≠j,并对估计得到的复振幅的相位进行优化,得到优化后的衍射光场公式为:
[0058][0059]
进行相位梯度计算的目标函数为:
[0060][0061]
式中,和是和ij(u,v)的归一化强度,是用第k个衍射面衍射光斑计算得到的第j个离焦面的衍射光斑强度值;w
jk
(u,v)是权重参数,用以去除低信噪比值像素点。
[0062]
进行相位梯度计算的方法为:
[0063][0064]
式中,im[]代表取虚部,通过下式计算
[0065][0066][0067]
式中,δz
jk
是第j个衍射面和第k个衍射面之间的距离,g
jk
(u,v)表示第k个衍射面衍射光斑计算得到的第j个离焦面的的复振幅。
[0068]
s6:将s5计算得到的第j个离焦面衍射计算到下一个离焦面第j’个离焦面,公式为:
[0069][0070]
并做符号替换j
′
=j,并用s3处理的后的衍射光斑做振幅替换
[0071][0072]
s7:迭代次数t=t+1,重复步骤s5~s6,直到t≥t,t表示迭代总数;
[0073]
s8:从第j个离焦面,将s5计算得到的优化后的衍射光场逆衍射回待测波前面,得到重建的光场,公式为:
[0074][0075]
式中,δz
1j
是第1个衍射面和第j个衍射面之间的距离。
[0076]
下面给出本发明方法的一个具体实施例,对该方法的技术效果进行说明。
[0077]
这里焦距选择f=1079.41mm,z1,z2,z3=[-10,-15,-20]mm,口径d=22.9mm,波前检测的迭代总数n=5000,有效光斑采样数为1024
×
1024。
[0078]
在该实施例中,采集三幅离焦衍射图像进行波前的相位和振幅重建,选用的衍射计算模型为菲涅尔衍射模型,图3为本发明所提方法的恢复结果图。其中,(a1)和(a2)为本发明所提方法的恢复相位和振幅所使用的初始值,(b1)和(b2)为本发明所提方法的恢复的相位和振幅,(c1)和(c2)为真实图的相位和振幅。从图中可以看出本文提出的方法的有效性。
[0079]
以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换,均应包含在本发明的保护范围之内。