一种石材大板表面凹坑和裂缝的快速检测装置的制作方法
1.本发明涉及石材大板缺陷检测技术领域,特别是指一种石材大板表面凹坑和裂缝的快速检测装置。
背景技术:
2.随着石材大板在建筑行业的广泛使用,不仅石材大板的需求量在急剧增长同时其质量要求也在不断提高,对于天然石材表面常有许多沙眼,裂缝,凹坑等,影响石材品相,因此需要对其进行补胶,实现对缺陷的修补。现如今石材大板的人工补胶过程,主要是通过人眼观察找出需要补胶的位置,然后对其缺陷出进行补胶,这种修补缺陷的方式不但成本高,工人劳动强度大,同时工作效率也十分低。
3.市场上的现有的石板检测装置是将石板放在传输机上,通过电机驱动传输机,检测装置位于传输机正上方,通常检测装置是由多个相机或摄像头组成,通过传输机实现对石板采集多幅图二维图像,然后通过算法对多张图像进行合并,最总获得石板全貌图像。对石板三维的检测也通常是将扫描仪置于石板正上方,通过移动机构实现对石板的逐步扫描。
4.现有石板检测装置的检测方法存在以下几个问题:1.通过相机获得石板的二维图像,只能获取石板表面的二维信息,无法获得石板表面的三维形貌数据,也就无法测量出石板凹坑,裂缝的深度和大致容积以及石板表面的纹理信息。2.由于图像采集过程中,石板一直是处于运动状态,就会导致石板处于一个震动状态,从而降低采集的图像质量,导致后续的缺陷检测精度降低,同时需要对多张图像进行合并,而在合并过程中也会进一步导致降低图像质量。
5.另外,目前对于石材大板的缺陷检测也仅是识别出缺陷,并未对石材大板的缺陷进行周围颜色的识别和对缺陷进行容积估算,这也使得天然石材大板需要人工进行对缺陷出进行补胶,同时补胶量也需要人为估算。
技术实现要素:
6.本发明的主要目的在于克服现有技术中石材大板缺陷检测的上述缺陷,提出一种石材大板表面凹坑和裂缝的快速检测装置,可大大的提高检测速度,同时也可以获得石板表面更多的信息数据,有助于后续实现石材大板自动化补胶。
7.本发明采用如下技术方案:
8.一种石材大板表面凹坑和裂缝的快速检测装置,其特征在于,包括:
9.输送机构,用于输送石材大板;
10.图像采集机构,架设于输送机构上方以采集石材大板处于静止状态的图像;
11.三维线激光扫描仪,用于采集凹坑和裂缝的三维点云数据进行预处理和三维重建得到凹坑和裂缝的三维形貌;
12.机械臂,与三维线激光扫描仪相连以驱动三维线激光扫描仪移动;
13.主控装置,与输送机构、图像采集机构、三维线激光扫描仪和机械臂相连,用于对采集的图像进行处理得到凹坑和裂缝周围的颜色及其在石材大板上的位置和形状,根据位置控制机械臂驱动三维线激光扫描仪移动以获取凹坑和裂缝的三维形貌进行最小包围盒计算,并且对凹坑和裂缝进行容积估算。
14.优选的,所述输送机构为辊筒式输送机构。
15.优选的,所述机械臂还包括有滑轨和滑座,该滑轨位于所述输送机构一侧且与其输送方向平行,所述滑座安装于机械臂底部且与该滑轨为滑动配合。
16.优选的,还包括有三维数控滑动机构,该三维数控滑动机构与所述输送机构滑动配合并连接驱动所述图像采集机构移动。
17.优选的,还包括有至少一照明灯,所述三维数控滑动机构还连接驱动该照明灯与所述图像采集机构同步移动。
18.优选的,所述对采集的图像进行处理得到凹坑和裂缝周围的颜色及其在石材大板上的位置和形状具体包括如下:
19.对采集的含有共同区域的多张图像进行图像拼接;
20.对拼接后的图像进行图像增强、图像去噪和图像分割;
21.对处理后的图像进行特征提取,完成对凹坑和裂缝周围颜色识别以及获得凹坑和裂缝的位置和轮廓形状。
22.优选的,所述三维线激光扫描仪对采集的三维点云数据进行噪声处理、点云法向估算和特征增强,再进行网格曲面重构和曲面拟合完成三维重建。
23.优选的,所述主控装置是在获得每个凹坑和裂缝的三维形貌后,再对每个凹坑和裂缝的三维形貌进行最小包围盒计算,从而获得每个凹坑和裂缝的最小包围盒。
24.优选的,所述主控装置是将每个凹坑和裂缝的包围盒的体积作为估算的容积.
25.由上述对本发明的描述可知,与现有技术相比,本发明具有如下有益效果:
26.1、本发明的装置,设置输送机构用于输送石材大板,图像采集机构架设于输送机构上方以采集石材大板处于静止状态的图像;三维线激光扫描仪配合机械臂用于采集凹坑和裂缝的三维点云数据进行预处理和三维重建得到凹坑和裂缝的三维形貌,主控装置用于对采集的图像进行处理得到凹坑和裂缝周围的颜色及其在石材大板上的位置和形状,根据位置控制机械臂驱动三维线激光扫描仪移动以获取凹坑和裂缝的三维形貌进行最小包围盒计算,并且对凹坑和裂缝进行容积估算等,大大的提高检测速度,同时也可以获得石板表面更多的信息数据,有助于后续实现石材大板自动化补胶。
27.2、本发明的装置,机械臂采用滑轨式机械臂从而增大机械臂的工作范围,使得三维线激光扫描仪可实现精确的聚焦石板并对齐扫描,三维数控滑动机构,可以实现图像采集机构的xyz三个方向的移动,不仅有利于相机精确的对焦扑获高质量的图像,同时也有利于扩大检测的石板尺寸规格范围。
28.3、本发明的装置,在对石板进行图像采集及三维点云数据扫描时,石板是处于静止状态,不会出现上下抖动,并且通过调整机械臂的扫描路径可以获得更为准确的三维形貌数据,另外,在三维数控滑动机构的横架上设有两个照明灯,用于调节拍照环境的亮度,获得最佳的照明效果,利于获得高质量的图像,图像更加清晰、畸变低。
29.4、本发明的装置,将三维扫描和二维图像相结合,实现了对石板表面缺陷检测具
有更多的灵活性,先通过二维图像定位凹坑,裂缝以及周围颜色,再针对识别出的凹坑,裂缝进行针对型的扫描获得凹坑,裂缝的深度信息,此方式不仅可大大的提高检测速度,同时也可以获得石板表面更多的信息数据。同时机械臂三维扫描和高清相机二维图像扑获也可分别独立的工作,根据实际需求可以选择不同的检测方式,提高了检测的多样性和检测效率。
30.5、本发明的装置,通过采用包围盒算法,来实现对每个凹坑和裂缝的容积估算,为后续的石材大板补胶量提供了参考,有利于实现石材大板的自动化补胶和提高补胶的效率。
附图说明
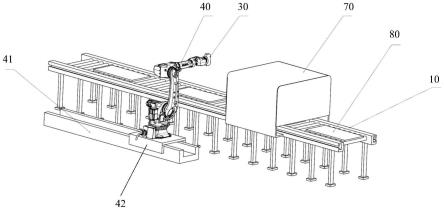
31.图1为本发明装置组成图;
32.图2为三维数控滑动机构主要部件结构图;
33.图3为三维数控滑动机构的横杆结构图;
34.其中:
35.10、输送机构,20、图像采集机构,30、三维线激光扫描仪,40、机械臂,41、滑轨,42、滑座,50、三维数控滑动机构,51、立架,51a、滑块,52、横架,53、滑块组,54、第二驱动装置,54a、丝杆,55、第三驱动装置,60、照明灯,70、机壳,80、石材大板。
36.以下结合附图和具体实施例对本发明作进一步详述。
具体实施方式
37.以下通过具体实施方式对本发明作进一步的描述。
38.本发明中,对于术语“第一”、“第二”、“第三”等仅用于区别类似的对象,而不必用于描述特定的顺序或先后次序,也不能理解为指示或暗示相对重要性。对于描述中,采用了“上”、“下”、“左”、“右”、“前”和“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
39.另外,在本技术的描述中,除非另有说明,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。
40.参见图1-图3,一种石材大板表面凹坑和裂缝的快速检测装置,包括:输送机构10、图像采集机构20、三维线激光扫描仪30、机械臂40和主控装置等。该输送机构10用于输送石材大板80,其可采用辊筒式输送机构10,包括机架、若干辊筒和输送驱动装置,该若干辊筒可转动地安装于机架上,该输送驱动装置连接驱动辊筒转动实现输送石材大板80。
41.图像采集机构20架设于输送机构10上方以采集石材大板80处于静止状态的图像。本发明中,还包括有三维数控滑动机构50,该三维数控滑动机构50与输送机构10滑动配合并连接驱动图像采集机构20移动。即通过三维数控滑动机构50可驱动图像采集机构20在x、y、z三个方向上移动,从而调节图像采集机构20的位置,以求获得高质量的图像,图像更加清晰、畸变低,并且满足不同尺寸规格的石材大板的需求。该图像采集机构20可采用高清相
机,采集的是二维平面图像。
42.具体的,该三维数控滑动机构50可包括两立架51、一横架52、滑块组53和多个驱动装置,该两立架51底端分别设有滑块51a以与输送机构10的两侧滑动配合,横架52可升降地设置于两立架51之间,该滑块组53与横架52为滑动配合,其包括至少一滑块,其中一滑块可用于安装图像采集机构20,多个滑块可相连以同步移动。其中,立架51与输送机构10的输送平面相垂直,该横架52与立柱相垂直。多个驱动装置可包括第一驱动装置、第二驱动装置54和第三驱动装置55,该第一驱动装置用于驱动两立架51沿输送机构10的输送方向移动,该第二驱动装置54用于驱动横架52沿立柱升降,该第三驱动装置55用于驱动滑块组53沿横架52移动。该第一驱动装置可采用直线电机或气缸或其它,该第二驱动装置54可采用伺服电机配合滚珠丝杆54a等实现,该滚珠丝杆与横杆为螺纹配合,第三驱动装置55可采用气缸或伺服电机配合滚珠丝杆等。实际应用中,也可采用手动调节滑块组53在立架51上的位置。
43.进一步的,为了采集更高质量的图像,还包括有至少一照明灯60和机壳70,该机壳70罩设于输送机构10顶部且不影响输送机构10传输石材大板80,该机壳70可与输送机构10的机架相对固定,三维数控滑动机构50和图像采集机构20位于机壳70内。三维数控滑动机构50还连接驱动该照明灯60与图像采集机构20同步移动,即照明灯60也可安装于滑块组53的滑块上并位于图像采集机构20侧边,例如包括两照明灯60,分别位于图像采集机构20两侧,照明灯60与图像采集机构20之间具有一段距离。本发明通过照明灯60可调节拍照环境的亮度,通过对照明灯60位置的调整,可获得最佳的照明效果。
44.本发明通过三维数控滑动机构50可以实现对不同规格尺寸的石板拍摄出高清的图像,同时在拍摄过程中,石板是处于静止状态,不会产生震动,相机可以精确地聚焦石板并对其拍摄,有利于减轻后续的图像处理难度。
45.三维线激光扫描仪30用于采集凹坑和裂缝的三维点云数据进行预处理和三维重建得到凹坑和裂缝的三维形貌。机械臂40与三维线激光扫描仪30相连以驱动三维线激光扫描仪移动。
46.具体的,机械臂40还包括有滑轨41和滑座42,该滑轨41位于输送机构10一侧且与其输送方向平行,该滑座42安装于机械臂40底部且与该滑轨41为滑动配合。三维线激光扫描仪30安装在机械臂40末端法兰盘上,通过机械臂40带动扫描仪可实现对石材大板80进行大范围的自动化扫描。
47.主控装置与输送机构10、图像采集机构20、三维线激光扫描仪30和机械臂40相连,用于控制各个机构协同工作实现快速检测凹坑和裂缝等,具体如下:
48.1)主控装置控制输送机构10工作将石材大板80输送至机壳70内后停止,则机壳70内的石材大板80处于静止状态。
49.主控装置控制第一驱动装置、第二驱动装置54和第三驱动装置55工作调整图像采集机构20的位置以便获得高质量的石材大板80板表面图像和石材大板80全貌,之后,控制图像采集机构20采集石材大板80的图像。
50.2)主控装置获取采集的图像进行处理得到凹坑和裂缝周围的颜色及其在石材大板80上的位置和形状。该图像处理具体可包括如下:
51.对采集的含有共同区域的多张图像进行图像拼接;
52.对拼接后的图像进行图像增强、图像去噪和图像分割;
53.对处理后的图像进行特征提取,完成对凹坑和裂缝周围颜色识别以及获得凹坑和裂缝的位置和轮廓形状。
54.3)主控装置根据凹坑和裂缝的位置控制机械臂40带动三维线激光扫描仪30移动至凹坑和裂缝所在位置进行扫描,获取凹坑和裂缝的三维形貌进行最小包围盒计算,并且对凹坑和裂缝进行容积估算。
55.具体的,三维线激光扫描仪30可采集凹坑和裂缝的三维点云数据,进行噪声处理、点云法向估算和特征增强,再进行网格曲面重构和曲面拟合完成三维重建。
56.主控装置是在获得每个凹坑和裂缝的三维形貌后,再对每个凹坑和裂缝的三维形貌进行最小包围盒计算,从而获得每个凹坑和裂缝的最小包围盒。本发明中可采用的包围盒算法包括有aabb包围盒、包围球、方向包围盒obb以及固定方向凸包fdh等。
57.最后,主控装置可将每个凹坑和裂缝的包围盒的体积作为估算的容积。
58.上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1