一种基于波浪滑翔器的水声检测识别避障方法及系统与流程
1.本发明涉及声波测量技术领域,特别是涉及一种基于波浪滑翔器的水声检测识别避障方法及系统。
背景技术:
2.波浪滑翔器利用波浪能驱动平台,以太阳能作为电力供应,具有平台自噪声小、续航时间长以及平台可控等优点,十分适合搭载声载荷进行海域巡逻观测等任务。
3.但是在波浪滑翔器进行海域巡逻观测的任务时,由于波浪滑翔器的体积较小,在大海中不容易被舰船发现,所以舰船在航行中容易撞翻波浪滑翔器,导致波浪滑翔器无法完成海域巡逻观测的任务。
技术实现要素:
4.本发明的目的是提供一种基于波浪滑翔器的水声检测识别避障方法及系统,能够对舰船目标进行避障。
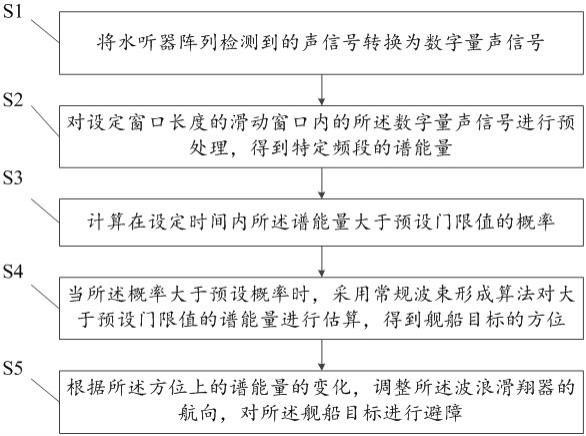
5.为实现上述目的,本发明提供了如下方案:一种基于波浪滑翔器的水声检测识别避障方法,所述方法包括:将水听器阵列检测到的声信号转换为数字量声信号;对设定窗口长度的滑动窗口内的所述数字量声信号进行预处理,得到特定频段的谱能量;计算在设定时间内所述谱能量大于预设门限值的概率;当所述概率大于预设概率时,采用常规波束形成算法对大于预设门限值的谱能量进行估算,得到舰船目标的方位;根据所述方位上的谱能量的变化,调整所述波浪滑翔器的航向,对所述舰船目标进行避障。
6.可选地,所述对设定窗口长度的滑动窗口内的所述数字量声信号进行预处理,得到特定频段的谱能量,具体包括:对设定窗口长度的滑动窗口内的所述数字量声信号进行傅里叶变换,得到傅里叶变换后的声信号;对傅里叶变换后的声信号取绝对值,得到全频段的谱能量;对所述全频段的谱能量进行滤波,得到特定频段的谱能量。
7.可选地,所述计算在设定时间内所述谱能量大于预设门限值的概率,具体包括:统计设定时间内所述谱能量大于预设门限值的次数以及所述谱能量与所述预设门限值比较的总次数;将所述谱能量大于预设门限值的次数除以所述总次数,得到所述谱能量大于预设门限值的概率。
8.可选地,所述根据所述方位上的谱能量的变化,调整所述波浪滑翔器的航向,对所
述舰船目标进行避障,具体包括:判断所述方位上的谱能量是否变大;当所述方位上的谱能量变大,则所述波浪滑翔器沿与舰船目标航向垂直的航向航行;当所述方位的谱能量没有变大,则所述波浪滑翔器沿预设航向航行;所述预设航向为所述波浪滑翔器预定航行路线。
9.可选地,所述方法还包括:将所述概率、所述舰船目标的方位和所述波浪滑翔器的航向实时发送给岸基。
10.一种基于波浪滑翔器的水声检测识别避障系统,应用于上述的基于波浪滑翔器的水声检测识别避障方法,所述系统包括:转换模块,用于将水听器阵列检测到的声信号转换为数字量声信号;谱能量确定模块,用于对设定窗口长度的滑动窗口内的所述数字量声信号进行预处理,得到特定频段的谱能量;概率确定模块,用于计算在设定时间内所述谱能量大于预设门限值的概率;方位确定模块,用于当所述概率大于预设概率时,采用常规波束形成算法对大于预设门限值的谱能量进行估算,得到舰船目标的方位;航向确定模块,用于根据所述方位上的谱能量的变化,调整所述波浪滑翔器的航向,对所述舰船目标进行避障。
11.可选地,所述谱能量确定模块包括:傅里叶变换子模块,用于对设定窗口长度的滑动窗口内的所述数字量声信号进行傅里叶变换,得到傅里叶变换后的声信号;绝对值运算子模块,用于对傅里叶变换后的声信号取绝对值,得到全频段的谱能量;滤波子模块,用于对所述全频段的谱能量进行滤波,得到特定频段的谱能量。
12.可选地,所述概率确定模块包括:统计子模块,用于统计设定时间内所述谱能量大于预设门限值的次数以及所述谱能量与所述预设门限值比较的总次数;概率确定子模块,用于将所述谱能量大于预设门限值的次数除以所述总次数,得到所述谱能量大于预设门限值的概率。
13.可选地,所述航向确定模块包括:判断子模块,用于判断所述方位上的谱能量是否变大;航向调整子模块,用于当所述方位的谱能量变大,则所述波浪滑翔器沿与舰船目标航向垂直的航向航行;航向恢复子模块,用于当所述方位的谱能量没有变大,则所述波浪滑翔器沿预设航向航行;所述预设航向为所述波浪滑翔器预定航行路线。
14.可选地,所述系统还包括:发送模块,用于将所述概率、所述舰船目标的方位和所述波浪滑翔器的航向实时发送给岸基。
15.根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明提供的一种基于波浪滑翔器的水声检测识别避障方法,包括:将水听器阵列检测到的声信号转换为数字量声信号;对设定窗口长度的滑动窗口内的数字量声信号进行预处理,得到特定频段的谱能量;计算在设定时间内谱能量大于预设门限值的概率;当概率大于预设概率时,采用常规波束形成算法对大于预设门限值的谱能量进行估算,得到舰船目标的方位;根据方位上的谱能量的变化,调整波浪滑翔器的航向,对舰船目标进行避障。本发明通过对水听器阵列接收到的声信号进行处理,确定波浪滑翔器存在的舰船目标的方位,并根据声信号的能量变化趋势对舰船目标进行避障,提升波浪滑翔器平台的观测能力以及生存周期。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
17.图1为本发明提供的基于波浪滑翔器的水声检测识别避障方法流程图;图2为本发明提供的舰船目标水声检测的工作流程图;图3为本发明的舰船目标检测算法流程图;图4为本发明的基于目标航向估计的平台避障算法流程图;图5为本发明提供的基于波浪滑翔器的水声检测识别避障系统模块图。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.本发明的目的是提供一种基于波浪滑翔器的水声检测识别避障方法及系统,能够对舰船目标进行避障。
20.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
21.基于波浪滑翔器的水声检测识别避障方法基于功率谱能量检测。水听器阵列接收外界的声信号,并将声信号转换为电荷信号,然后通过信号调理电路将其进一步转换为电压信号后,输入至adc之中,adc将模拟的电压信号进行采样量化;具体的,信号调理电路包括:程控增益放大模块、程控滤波模块、电源电路模块以及其它外围组件。信号调理步骤如下:信号输入后首先经过电压跟随器实现输入阻抗匹配,之后信号通过低噪声放大器进行差模放大,输入信号中尽可能地削减信号传输过程中的共模噪声。差模放大后的信号会经过一个固定增益精密运放,将信号由双端转化成单端,并实现一个相对增益系数较大的固定增益。再由dac与精密运放组成的程控衰减模块,对之前固定增益的信号可调节的衰减,以此实现增益的调节。且最后输入输出电压同相,至此完成程控增益模块,从而实现高精度信号调理。将调理后电压信号进而输入至adc之中,此时的采样精度为24bits,采样频率为
32khz。
22.如图1所示,本发明提供的一种基于波浪滑翔器的水声检测识别避障方法,所述方法包括:步骤s1:将水听器阵列检测到的声信号转换为数字量声信号;具体的,采样量化之后的声学数据为大端补码格式,对声学数据进行解码,得到数字量声信号。
23.在实际应用中,使用水听器阵列对当前海域进行声信号采集。水听器是采用压电陶瓷作为换能材料,将水声信号转换为电信号的换能器,可以输出介于
±
3v的模拟信号。具体将水听器阵列采集到的原始声学信号进行实时信号处理。水听器阵列接收外界的声信号,包括但不限于舰船目标声信号、海洋环境背景噪声、海洋生物噪声。
24.步骤s2:对设定窗口长度的滑动窗口内的所述数字量声信号进行预处理,得到特定频段的谱能量。
25.s2具体包括:步骤s21:对设定窗口长度的滑动窗口内的所述数字量声信号进行傅里叶变换,得到傅里叶变换后的声信号;具体的,使用2048点大小的滑动窗口对预处理后的声学信号进行短时傅里叶变换。
26.步骤s22:对傅里叶变换后的声信号取绝对值,得到全频段的谱能量。
27.步骤s23:对所述全频段的谱能量进行滤波,得到特定频段的谱能量。具体的,使用带通滤波得到特定频段750hz~950hz的谱能量。
28.步骤s3:计算在设定时间内所述谱能量大于预设门限值的概率。
29.s3具体包括:步骤s31:统计设定时间内所述谱能量大于预设门限值的次数以及所述谱能量与所述预设门限值比较的总次数;具体的,对比谱能量与预设的门限值,如果大于门限值6db,则选择预警一次,如果不大于门限值,则继续进行能量检测。对设定时间内的预警次数进行统计,获得预警概率。
30.作为一个具体实施方式,s31具体包括:步骤s311:判断所述谱能量是否大于预设门限值。
31.步骤s312:当所述谱能量小于等于预设门限值时,所述总次数增加一次。
32.步骤s313:当所述谱能量大于预设门限值时,所述谱能量大于预设门限值的次数增加一次,且所述总次数增加一次。
33.步骤s32:将所述谱能量大于预设门限值的次数除以所述总次数,得到所述谱能量大于预设门限值的概率。
34.具体的,简化后的被动声纳方程表示为:sl-nl》dt。
35.其中,sl为特定频段(750~950hz)的谱能量,nl为由历史数据处理得到的在相同频带时的历史海洋环境背景噪声级,dt为最小检测门限,由奈曼皮尔逊准则设定为6db。若出现舰船目标则此频段内谱能量会激增,满足此不等式,则选择预警一次,如果不满足则继续进行能量检测。因异常情况可能出现虚警现象,因此将10秒内的预警次数进行统计,获得预警概率,不失一般性地,预警概率门限设为80%。若10秒内的预警概率大于80%,判定为周围海域存在舰船目标,进而采取平台避障方案。
36.步骤s4:当所述概率大于预设概率时,采用常规波束形成算法对大于预设门限值
的谱能量进行估算,得到舰船目标的方位;具体的,若预警概率超过80%,则认为周围海域存在舰船目标,基于目标航向估计的避障方法进行平台避障。进一步的,所述的基于目标航向估计的避障方法,利用基于功率谱能量检测的方位估计算法对目标方位进行估计,并依据能量变化趋势获取目标航向,依此对所述波浪滑翔器进行避障控制。
37.当检测到舰船目标后,对水听器阵列采集到的声学信号进行常规波束形成,估算目标与波浪滑翔器平台的方位关系。利用下式获得目标方位θ
*
:θ
*
=argmax(wh(θ)e{x(t)xh(t)}w(θ))。
38.式子含义为wh(θ)e{x(t)xh(t)}w(θ)最大时所对应的参数θ
*
,即为要求的目标方位。其中w(θ)为阵列流形,wh(θ)为其转置,x(t)为各个阵元接收到的声学信号,xh(t)为其转置。阵列流形由阵列形状确定,对于m元均匀线列阵而言,其阵列流形为:w(θ)=[1,exp(jπsinθ),
…
,exp(jπ(m-1)sinθ)]。
[0039]
在此采用四元均匀线列阵,则其阵列流形为:w(θ)
*
=[1,exp(jπsinθ),exp(j2πsinθ),exp(j3πsinθ)]。
[0040]
步骤s5:根据所述方位上的谱能量的变化,调整所述波浪滑翔器的航向,对所述舰船目标进行避障。
[0041]
s5具体包括:步骤s51:判断所述方位上的谱能量是否变大;具体的,通过监测该方位上的信号能量是否变大来判断舰船目标是否正在驶向波浪滑翔器平台。
[0042]
步骤s52:当所述方位上的谱能量变大,则所述波浪滑翔器沿与舰船目标航向垂直的航向航行;具体的,如果舰船目标正在驶向波浪滑翔器平台则对主控发出远离避障指令,考虑到实际情况中,由主控控制平台进行与垂直目标航向并远离航行的避障动作以避免险情。
[0043]
步骤s53:当所述方位的谱能量没有变大,则所述波浪滑翔器沿预设航向航行;所述预设航向为所述波浪滑翔器预定航行路线。具体的,如果舰船目标没有驶向波浪滑翔器平台,则保持既定航向航行。
[0044]
此外,所述方法还包括:将所述概率、所述舰船目标的方位和所述波浪滑翔器的航向实时发送给岸基。具体的,若检测到舰船目标则向主控系统发送避障指令进行避障操作,同时主控将获取避障指令及避障操作信息通过卫星通信模块回传至岸基监控端。
[0045]
作为一个具体的实施方式,如图2所示,舰船目标水声检测的工作流程如下所述:第一步,水听器阵列采集声信号。
[0046]
第二步,应用舰船目标检测算法。
[0047]
第三步,判断是否检测到目标。
[0048]
第四步,如果检测到目标,执行第六步。
[0049]
第五步,如果没有检测到目标,则返回第一步。
[0050]
第六步,应用基于目标航向估计的平台避障方法,获取目标方位并卫星回传。
[0051]
第七步,应用基于目标航向估计的平台避障方法,判断该方位上的能量是否增加。
[0052]
第八步,如果检测到该方位能量没有增加,保持当前航向,并返回第一步。
[0053]
第九步,如果检测到该方位能量增加,避障走航并卫星回传。
[0054]
作为一个具体的实施方式,舰船目标检测算法如图3所示,具体如下所示:第一步,对原始声学数据进行数据预处理。
[0055]
第二步,将预处理后的声学数据进行短时傅里叶变换。
[0056]
第三步,将短时傅里叶变换后的声学数据进行滤波,并计算谱能量。
[0057]
第四步,判断谱能量是否大于预设门限值。
[0058]
第五步,若谱能量大于预设门限值,则执行第七步。
[0059]
第六步,若谱能量不大于预设门限值,则执行第一步。
[0060]
第七步,发出一次预警。
[0061]
第八步,判断预警概率是否达到预设概率。
[0062]
第九步,若预警概率达到预设概率,则进行基于目标航向估计的平台避障。
[0063]
第十步,若预警概率没有达到预设概率,则执行第一步。
[0064]
作为一个具体的实施方式,本发明的基于目标航向估计的平台避障算法流程图如图4所示,具体如下所示:第一步,对原始声学数据应用波束形成。
[0065]
第二步,根据第一步得到的数据估算平台与目标间的方位关系。
[0066]
第三步,判断该方位上的能量是否增加。
[0067]
第四步,若该方位上的能量增加,则执行第六步。
[0068]
第五步,若该方位上的能量没有增加,则执行第八步。
[0069]
第六步,主控控制平台避障走航。
[0070]
第七步,将目标信息回传。
[0071]
第八步,进行舰船目标检测。
[0072]
第九步,判断是否检测到舰船目标。
[0073]
第十步,若检测到舰船目标,则执行第一步。
[0074]
第十一步,若没有检测到舰船目标,则执行第八步。
[0075]
本发明提供的一种基于波浪滑翔器的水声检测识别避障方法,对舰船特定水声目标的检测,并依照检测结果引导平台进行走航避障,提升波浪滑翔器平台的观测能力以及设备的生存周期。
[0076]
如图5所示,本发明提供的一种基于波浪滑翔器的水声检测识别避障系统,应用于上述所述的基于波浪滑翔器的水声检测识别避障方法,所述系统包括:转换模块1,用于将水听器阵列检测到的声信号转换为数字量声信号。
[0077]
谱能量确定模块2,用于对设定窗口长度的滑动窗口内的所述数字量声信号进行预处理,得到特定频段的谱能量。
[0078]
概率确定模块3,用于计算在设定时间内所述谱能量大于预设门限值的概率。
[0079]
方位确定模块4,用于当所述概率大于预设概率时,采用常规波束形成算法对大于预设门限值的谱能量进行估算,得到舰船目标的方位。
[0080]
航向确定模块5,用于根据所述方位上的谱能量的变化,调整所述波浪滑翔器的航向,对所述舰船目标进行避障。
[0081]
其中,所述谱能量确定模块2包括:傅里叶变换子模块,用于对设定窗口长度的滑动窗口内的所述数字量声信号进行
傅里叶变换,得到傅里叶变换后的声信号。
[0082]
绝对值运算子模块,用于对傅里叶变换后的声信号取绝对值,得到全频段的谱能量。
[0083]
滤波子模块,用于对所述全频段的谱能量进行滤波,得到特定频段的谱能量。
[0084]
其中,所述概率确定模块3包括:统计子模块,用于统计设定时间内所述谱能量大于预设门限值的次数以及所述谱能量与所述预设门限值比较的总次数。
[0085]
概率确定子模块,用于将所述谱能量大于预设门限值的次数除以所述总次数,得到所述谱能量大于预设门限值的概率。
[0086]
其中,所述航向确定模块5包括:判断子模块,用于判断所述方位上的谱能量是否变大。
[0087]
航向调整子模块,用于当所述方位的谱能量变大,则所述波浪滑翔器沿与舰船目标航向垂直的航向航行。
[0088]
航向恢复子模块,用于当所述方位的谱能量没有变大,则所述波浪滑翔器沿预设航向航行;所述预设航向为所述波浪滑翔器预定航行路线。
[0089]
此外,所述系统还包括:发送模块,用于将所述概率、所述舰船目标的方位和所述波浪滑翔器的航向实时发送给岸基。
[0090]
在长期海域巡逻观测中,波浪滑翔器可利用位于水下的声载荷对水中目标进行检测,再将结果回传的同时依照声观测内容引导平台避障。本发明目的在于实现波浪滑翔器对于周边水声环境的观测,包括对舰船特定水声目标的检测,并依照检测结果引导平台进行走航避障,提升波浪滑翔器平台的观测能力以及设备的生存周期。本发明所提供的基于波浪滑翔器的水声检测识别避障方法及系统也可扩展到其他与波浪滑翔器探测原理类似的小型海洋移动观测平台上。
[0091]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0092]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1