显示控制系统的制作方法
1.本发明涉及一种显示控制系统。
背景技术:
2.近来,与包括驾驶辅助技术在内的自动驾驶相关的技术取得了惊人的进 步,不同行业也相继参与进来,并受到全世界的极大关注。
3.其中,自动驾驶等级为3以上(在自动驾驶等级为3时包括驾驶辅助模 式)的自动驾驶来到实际应用阶段。
4.在自动驾驶等级为3以上的自动驾驶中,例如,设想从服务器等获取由 包含地物等详细信息的最新信息构成的高精细地图,基于该信息进行自动驾 驶。
5.另一方面,在车辆导航装置中,如以往那样,使用存储于内部的存储部 的导航用地图来提供地图信息,进行直到目的地为止的最佳路线的搜索等, 并基于其结果来进行路径引导等(例如,参照专利文献1)。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2017-173286号公报
技术实现要素:
9.技术问题
10.在此,在上述的导航用地图中,由于更新过程花费时间和/或成本,所以 大多是确定一定间隔的更新时间来进行。
11.即,导航用地图的地图信息比频繁地进行信息更新的高精细地图的地图 信息陈旧。
12.因此,如果由于导航用地图与高精细地图中的地图信息的差异而显示车 辆正行驶在导航用地图中没有的道路上,或者由于地图匹配功能的影响而显 示车辆正在曲折行驶,则存在给车辆的乘员带来不适感这样的问题。
13.因此,本发明是鉴于上述问题而完成的,其目的在于提供一种显示控制 系统,通过根据可靠度来变更本车辆想要行驶的行驶路径的显示方式,从而 使车辆的乘员事前预先认识到在自动驾驶模式或者驾驶辅助模式中发生的未 预期的路径变更,并缓和车辆的乘员的不适感。
14.技术方案
15.方式1:本发明的一个或一个以上的实施方式提出了一种显示控制系统, 其特征在于,所述显示控制系统包括车辆用导航装置和显示控制装置,所述 车辆用导航装置包括:存储部,其存储第一地图信息;位置信息获取部,其 获取本车辆的位置信息;路径信息检索部,其基于所述本车辆的位置信息、 乘员设定的目的地信息以及所述第一地图信息来检索路径信息;显示部,其 向所述本车辆的乘员显示所述第一地图信息、所述路径信息以
及所述本车辆 的位置信息;以及显示控制部,其控制所述显示部中信息的显示方式,所述 显示控制装置具备一个或多个处理器、以及以能够与所述一个或多个处理器 通信的方式连接的一个或多个存储器,所述一个或多个处理器判定所述本车 辆的驾驶主体,在判定出的所述本车辆的驾驶主体是车辆的情况下,至少计 算或评价包含于所述第一地图信息的所述路径信息的可靠度,并将根据所述 可靠度而变更所述显示部的所述路径信息的显示方式的显示控制信息发送到 所述显示控制部。
16.方式2:本发明的一个或一个以上的实施方式提出了一种显示控制系统, 其特征在于,所述一个或多个处理器将计算或评价而得的所述可靠度与所述 第一地图信息相关联地存储于所述存储器。
17.方式3:本发明的一个或一个以上的实施方式提出了一种显示控制系统, 其特征在于,所述一个或多个处理器将基于所述本车辆的所述位置信息的所 述路径信息与所述第一地图信息的所述路径信息不一致的所述路径信息的可 靠度计算或评价得低。
18.方式4:本发明的一个或一个以上的实施方式提出了一种显示控制系统, 其特征在于,所述一个或多个处理器在存在多个推荐度与基于所述本车辆的 位置信息的所述路径信息的推荐度为相同等级的推荐路径信息的情况下,将 所述推荐路径信息的可靠度计算或评价得低。
19.方式5:本发明的一个或一个以上的实施方式提出了一种显示控制系统, 其特征在于,所述一个或多个处理器以将所述推荐度为相同等级的多个所述 路径信息持续显示于所述显示部的方式进行控制。
20.方式6:本发明的一个或一个以上的实施方式提出了一种显示控制系统, 其特征在于,所述一个或多个处理器将在车辆偏离最初的路径的情况下执行 的路径重新检索次数为一定数量以上的所述路径信息的可靠度计算或评价得 低。
21.方式7:本发明的一个或一个以上的实施方式提出了一种显示控制系统, 其特征在于,所述一个或多个处理器将所述显示部的显示区域为预定区域以 上的所述路径信息的可靠度计算或评价得低。
22.方式8:本发明的一个或一个以上的实施方式提出了一种显示控制系统, 其特征在于,所述一个或多个处理器将与所述本车辆的位置信息相距预定距 离的所述路径信息的可靠度计算或评价得低。
23.发明效果
24.根据本发明的一个或一个以上的实施方式,具有如下的效果:通过根据 可靠度来变更本车辆想要行驶的行驶路径的显示方式,从而能够使车辆的乘 员事前预先认识到在自动驾驶模式或驾驶辅助模式中发生的未预期的路径变 更,并缓和车辆的乘员的不适感。
附图说明
25.图1是示出本发明的第一实施方式的显示控制系统的构成的图。
26.图2是示出本发明的第一实施方式的车辆用导航装置的构成的图。
27.图3是示出本发明的第一实施方式的显示控制装置的构成的图。
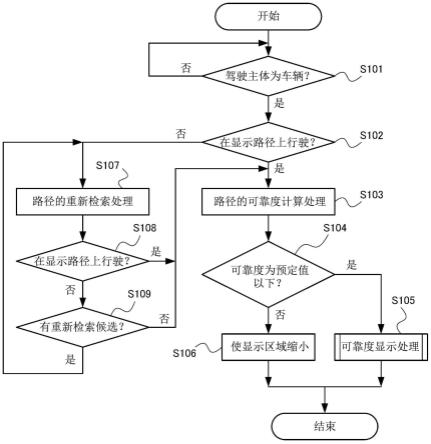
28.图4是本发明的第一实施方式的显示控制装置的处理流程。
29.图5是示出本发明的第一实施方式的每条路径的推荐度等级、与推荐度 近似的路
径的数量有关的等级、与一定期间内的重新检索次数有关的等级、 与显示区域有关的等级和可靠度之间的关系的图。
30.图6是本发明的第一实施方式的路径的可靠度计算处理的处理流程。
31.图7是示出本发明的第一实施方式的路径信息与第一地图信息不一致的 情况下的显示例的图。
32.图8是示出本发明的第一实施方式的推荐度与某个路径信息的推荐度为 相同等级的路径信息存在多个的情况下的显示例的图。
33.图9是示出本发明的第一实施方式的路径重新检索请求为一定次数以上 的路径信息的显示例的图。
34.图10是示出本发明的第一实施方式的显示区域为预定区域以上的路径 信息的显示例的图。
35.图11是示出本发明的第二实施方式的显示控制装置的构成的图。
36.图12是本发明的第二实施方式的显示控制装置的处理流程。
37.图13是示出本发明的第二实施方式的与本车辆的位置信息相距预定距 离的路径信息的显示例的图。
38.符号说明
39.1:显示控制系统
40.100:车辆用导航装置
41.110:存储部
42.120:位置信息获取部
43.130:路径信息检索部
44.140:显示部
45.150:显示控制部
46.200:显示控制装置
47.210:处理器
48.210a:处理器
49.211:驾驶主体判定部
50.212:可靠度计算部
51.212a:可靠度计算部
52.213:显示控制信息生成部
53.213a:显示控制信息生成部
54.214:可靠度评价部
55.220:存储器
具体实施方式
56.以下,使用图1至图13对本发明的实施方式进行说明。
57.《第一实施方式》
58.使用图1至图10,对本实施方式的显示控制系统1进行说明。
59.《显示控制系统的构成》
60.如图1所示,本实施方式的显示控制系统1被构成为包括车辆用导航装 置100、以及显示控制装置200。
61.车辆用导航装置100基于作为第一地图信息的导航地图,检索针对乘员 所设定的目的地的路径信息,并基于检索到的路径和第一地图信息,显示该 路径信息,对乘员进行路径引导。
62.作为第一地图信息的导航地图信息以一定间隔进行更新。
63.车辆用导航装置100接收交通信息等与道路状况有关的信息,并一并显 示包含检索到的路径在内的周边道路的拥堵信息等。
64.应予说明,在本实施方式中,在搭载车辆用导航装置100的本车辆的驾 驶主体为车辆的情况下,针对从后述的显示控制装置200发送的一部分路径, 基于对显示方式进行变更的显示信息来变更后述的显示部中的显示方式而进 行显示。
65.显示控制装置200针对各路径信息,基于确定的关系式来计算可靠度, 并根据计算出的每个路径信息的可靠度,将对各路径信息的显示方式进行变 更的显示控制信息发送到车辆用导航装置100,并使车辆用导航装置100中 的路径的显示方式变更。
66.《车辆用导航装置100的构成》
67.如图2所示,本实施方式的车辆用导航装置100被构成为包括:存储部 110、位置信息获取部120、路径信息检索部130、显示部140以及显示控制 部150。
68.存储部110存储作为第一地图信息的导航用地图信息。
69.具体而言,存储部110是存储有地图显示、设施检索、路径搜索等导航 所需的导航用地图信息的存储介质及其读取装置。
70.存储部110也可以由硬盘装置和/或半导体存储器构成。
71.位置信息获取部120具备例如gps接收器、方位传感器、距离传感器等, 并在预定的时刻进行本车辆的位置信息(经度信息、纬度信息)的检测,获 取本车辆的位置信息。
72.路径信息检索部130进行路径搜索处理,搜索按照预定的搜索条件将出 发地与乘员所设定的目的地之间连结的路径(引导路径)。
73.显示部140由例如lcd(液晶显示装置)等构成,并基于从未图示的导 航控制器输出的影像信号,来显示本车辆位置周边的地图图像、交叉路口引 导图像、或者包含通过设施检索而得的设施的详细信息的检索结果图像等。
74.显示控制部150基于从未图示的车辆用导航装置100的控制部或者后述 的显示控制装置200输入的地图图像描绘数据来控制显示部140的显示方式。
75.《显示控制装置200的构成》
76.如图3所示,本实施方式的显示控制装置200被构成为包括处理器210、 以及存储器220。
77.处理器210按照存储于后述的存储器220的控制程序进行整个显示控制 装置200的控制。
78.此外,在本实施方式中,特别地,还执行后述的驾驶主体判定部211、 可靠度计算部212、显示控制信息生成部213等的功能。
79.存储器220包括rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)等,在rom中存储有上述的控制 程序等,在ram中保存有各种数据
等。
80.在本实施方式中,例如,将来自车辆用导航装置100的路径信息与在后 述的可靠度计算部212中计算出的可靠度相关联地存储于ram。
81.《处理器210的构成》
82.如图3所示,处理器210被构成为包括驾驶主体判定部211、可靠度计 算部212以及显示控制信息生成部213。
83.驾驶主体判定部211例如从搭载于本车辆的车辆控制装置接收指示本车 辆是否是自动驾驶模式或驾驶辅助模式的信息,从而判定本车辆的驾驶主体。
84.驾驶主体判定部211将判定结果输出到可靠度计算部212。
85.可靠度计算部212基于以下的关系式,计算在路径信息检索部130中检 索到的路径信息的可靠度。
86.【数学式1】
87.可靠度=推荐度/(推荐度近似的路径的数量
×
一定期间内的重新检索次 数
×
显示区域)
88.在此,“推荐度”例如是针对导航用地图信息所包含的路径信息,对从有 行驶经验的用户等收到的回答进行统计而得到的指标,在车辆用导航装置10 0保持有该指标的情况下,从车辆用导航装置100获取。
89.此外,在从未图示的服务器等获取的情况下,也可以设为可靠度计算部 212直接获取。
[0090]“推荐度近似的路径的数量”是例如在有多个从本车辆的当前位置到某 个特定的地点为止的路径信息的情况下,针对其中的一个路径信息而言,上 述推荐度近似的路径信息的数量。
[0091]“近似”可以以彼此的数值和/或程度来判定,在对“推荐度”进行等级 划分的情况下,也可以将同一等级设为“近似”。
[0092]
此外,“一定期间内的重新检索次数”例如是针对导航地图信息所包含的 特定的路径信息进行了路径信息的重新检索的次数。
[0093]
此外,“显示区域”例如是针对导航用地图信息所包含的特定的路径信息, 在将该路径信息显示于显示部140的显示画面的情况下的比例尺。
[0094]
应予说明,对“路径”而言,在从本车辆的当前位置到目的地之间存在 与高精细地图的路径相交的地点(经由地)的情况下,包括:从本车辆的当 前位置到经由地、经由地之间、从经由地到目的地。
[0095]
显示控制信息生成部213生成根据在可靠度计算部212中计算出的可靠 度等变更显示部140的路径信息的显示方式的显示控制信息,并将生成的显 示控制信息发送到车辆用导航装置100。
[0096]
《显示控制系统1的处理》
[0097]
使用图4至图10,对本实施方式的显示控制系统1的处理进行说明。
[0098]
如图4所示,驾驶主体判定部211例如从搭载于本车辆的车辆控制装置 等接收指示本车辆是否是自动驾驶模式或者驾驶辅助模式的信息,从而判定 本车辆的驾驶主体(步骤s101)。
[0099]
在驾驶主体判定部211判定为本车辆的驾驶主体不是车辆的情况下(步 骤s101的“否”),使处理返回到步骤s101。
[0100]
另一方面,在驾驶主体判定部211判定为本车辆的驾驶主体是车辆的情 况下(步骤s101的“是”),处理器210基于从车辆用导航装置100接收到的、 例如路径信息和本车辆的位置信息等,判定本车辆是否正在显示于车辆用导 航装置100的显示路径上行驶(步骤s102)。
[0101]
处理器210在判定为本车辆正在显示于车辆用导航装置100的显示路径 上行驶的情况下(步骤s102的“是”),为了命令可靠度计算部212进行计算 所显示的路径信息的可靠度的处理,使处理转移到步骤s103。
[0102]
可靠度计算部212根据从车辆用导航装置100等得到的信息和上述数学 式1所示的关系式,计算出所显示的路径信息的可靠度(步骤s103)。
[0103]
在此,图5例示了在可靠度计算部212中每个路径信息的可靠度。
[0104]
如图5所示,可靠度按照可靠度从高到低的顺序划分为a~e这5个等 级,在该图中,将等级为c以下设为可靠度低。
[0105]
在用于可靠度的计算的推荐度、推荐度近似的路径的数量、一定期间内 的重新检索次数、显示区域的参数中,推荐度被划分为将最高推荐度设为“5
”ꢀ
的5个等级。
[0106]
此外,推荐度近似的路径的数量和一定期间内的重新检索次数从数量多 的开始依次划分为5个等级。
[0107]
进一步地,显示区域按照区域从大到小的顺序划分为5个等级。
[0108]
显示控制信息生成部213基于从可靠度计算部212得到的可靠度、所显 示的路径信息等,判定该路径信息的可靠度是否为预定值以下(在图5的例 子中为等级c以下)(步骤s104)。
[0109]
在此,预定值能够例示为所有可靠度的平均值、或者与规格对应的值等。 应予说明,预定值也可以适当变更。
[0110]
显示控制信息生成部213在判定为该路径信息的可靠度为预定值以下 (在图5的例子中为等级c以下)的情况下(步骤s104的“是”),执行生 成显示控制信息的可靠度显示处理,并结束处理。
[0111]
应予说明,对于可靠度显示处理的详细信息将在后面进行描述。
[0112]
另一方面,显示控制信息生成部213在判定为该路径信息的可靠度不为 预定值以下(在图5的例子中为等级c以下)的情况下(步骤s104的“否”), 生成使显示区域缩小的显示控制信息,并结束处理。
[0113]
此外,处理器210在判定为本车辆未在显示于车辆用导航装置100的显 示路径上行驶的情况下(步骤s102的“否”),进行路径的重新检索处理(步 骤s107)。接下来,处理器210再次判定本车辆是否正在显示于车辆用导航 装置100的显示路径上行驶(步骤s108)。
[0114]
处理器210在判定为本车辆正在显示于车辆用导航装置100的显示路径 上行驶的情况下(步骤s108的“是”),为了命令可靠度计算部212进行计算 所显示的路径信息的可靠度的处理,使处理转移到步骤s103。
[0115]
另一方面,处理器210在判定为本车辆未在显示于车辆用导航装置100 的显示路径上行驶的情况下(步骤s108的“否”),判定是否有重新检索候选 (步骤s109)。处理器210
在判定为没有重新检索候选的情况下(步骤s109 的“否”),使处理转移到步骤s103。处理器210在判定为有重新检索候选的 情况下(步骤s109的“是”),使处理转移到步骤s107。
[0116]
《可靠度显示处理》
[0117]
使用图6至图9,对本实施方式的可靠度显示处理进行说明。
[0118]
如图6所示,显示控制信息生成部213在本车辆不在显示于显示部140 的路径行驶的情况下,判定为该路径信息不存在于第一地图信息(导航用地 图)(步骤s1051的“否”)。
[0119]
然后,在该情况下,因为该路径信息的可靠度低,所以生成显示控制信 息(步骤s1055)。
[0120]
即,对于不存在于第一地图信息(导航用地图)的路径而言,由于不存 在推荐度,所以与除此以外的参数的等级无关地,在可靠度计算部212中计 算出的可靠度成为“0”,该等级成为“e”。
[0121]
因此,判定为该路径信息的可靠度低,显示控制信息生成部213生成显 示控制信息。
[0122]
如果使用图5、图7具体地进行说明,则在图5中,符合上述条件的路 径为例如“路径3”。
[0123]
图5的“路径3”是本车辆mb所行驶的路径,且是高精细地图上的路 径(图7的虚线),在经由地wp与第一地图信息的路径(图7的实线)相交。
[0124]
因此,显示控制信息生成部213生成例如将与其他路径不同的点划线的 显示作为从本车辆mb到经由地wp为止的路径的显示的显示控制信息。
[0125]
另一方面,显示控制信息生成部213在判定为该路径信息存在于第一地 图信息(导航用地图)的情况下(步骤s1051的“是”),使处理转移到步骤 s1052。
[0126]
显示控制信息生成部213判定是否有多个与本车辆正在行驶的显示于显 示部140的路径的推荐度为相同等级的路径(步骤s1052)。
[0127]
如果使用图5、图8具体地进行说明,则在图5中,符合上述条件的路 径为例如“路径1”。
[0128]“路径1”如图5所示,推荐度等级为“4”,相同的推荐度等级为“4
”ꢀ
的路径有路径z、路径α这两个。
[0129]
即,在本车辆正在行驶的显示于显示部140的路径为例如图5的“路径 1”的情况下,该“路径1”满足“有多个推荐度为相同等级的路径”这样的 条件(步骤s1052的“是”)。
[0130]
除此以外,如图5所示,“路径1”和“路径z”的可靠度为“c”等级 以下,被分类为可靠度低的路径,因此,如图8所示,对于“路径1”和“路 径z”生成将点划线的显示作为从本车辆mb到经由地wp为止的路径的显 示的显示控制信息。
[0131]
此外,“路径α”的可靠度为“b”等级,被分类为可靠度高的路径,因 此如图8所示,以通常的显示方式,即粗实线来显示。
[0132]
应予说明,推荐度为相同等级的多个路径信息被控制为在本车辆行驶过 程中也持续显示于显示部140。
[0133]
另一方面,显示控制信息生成部213在判定为没有多个与本车辆正在行 驶的显示于显示部140的路径的推荐度为相同等级的路径的情况下(步骤s1 052的“否”),使处理转移到步骤s1053。
[0134]
显示控制信息生成部213针对本车辆正在行驶的显示于显示部140的路 径,判定路径的重新检索次数是否为一定以上(步骤s1053)。
[0135]
如果使用图5、图9具体地进行说明,则在图5中,符合上述条件的路 径为例如“路径x”。
[0136]
即,如图5所示,“路径x”的一定期间内的重新检索次数等级为“5”, 满足“重新检索次数为一定以上”这样的条件(步骤s1053的“是”)。
[0137]
除此以外,如图5所示,“路径x”的可靠度为“d”等级,被分类为可 靠度低的路径,因此,如图9所示,对于“路径x”生成将点划线的显示作 为从本车辆mb到经由地wp为止的路径的显示的显示控制信息。
[0138]
另一方面,显示控制信息生成部213对于本车辆正在行驶的显示于显示 部140的路径,在判定为路径的重新检索次数不为一定以上的情况下(步骤 s1053的“否”),使处理转移到步骤s1054。
[0139]
显示控制信息生成部213针对本车辆正在行驶的显示于显示部140的路 径,判定显示区域是否为预定区域以上(步骤s1054)。
[0140]
如果使用图5、图10具体地进行说明,则在图5中,符合上述条件的路 径为例如“路径y”。
[0141]
即,如图5所示,“路径y”的显示区域等级为“5”,满足“显示区域为 预定区域以上”这样的条件(步骤s1054的“是”)。
[0142]
除此以外,如图5所示,“路径y”的可靠度为“d”等级,被分类为可 靠度低的路径,因此,如图10所示,对于“路径y”,生成将点划线的显示 作为从本车辆mb到经由地wp为止的路径的显示的显示控制信息。
[0143]
另一方面,显示控制信息生成部213对于本车辆正在行驶的显示于显示 部140的路径,在判定为显示区域不为预定区域以上的情况下(步骤s1054 的“否”),使处理转移至结束。
[0144]
《作用
·
效果》
[0145]
如以上说明的那样,本实施方式的显示控制系统1包括车辆用导航装置 100以及显示控制装置200,显示控制装置200的一个或多个处理器210判定 本车辆mb的驾驶主体,并在判定出的本车辆mb的驾驶主体为车辆的情况 下,至少计算出包含于第一地图信息的路径信息的可靠度,并将根据可靠度 而变更车辆用导航装置100的显示部140的路径信息的显示方式的显示控制 信息发送到显示控制部150。
[0146]
即,本实施方式的显示控制系统1在自动驾驶模式或者驾驶辅助模式的 车辆中,至少计算出包含于第一地图信息的路径信息的可靠度,并根据可靠 度而变更车辆用导航装置100的显示部140的路径信息的显示方式。
[0147]
因此,通过根据可靠度变更本车辆想要行驶的行驶路径的显示方式,从 而能够使车辆的乘员事前预先认识到在自动驾驶模式或者驾驶辅助模式中发 生的未预期的路径变更,并缓和车辆的乘员的不适感。
[0148]
本实施方式的显示控制系统1将计算出的可靠度与第一地图信息相关联 地存储于存储器。
[0149]
如果构成路径的道路或其周边环境没有大的变化,则确定过一次的可靠 度不会
发生变化。
[0150]
除此以外,为了抑制更新过程所需的时间和/或成本,导航用地图仅以一 定间隔进行更新。
[0151]
因此,如果将计算出的可靠度与第一地图信息相关联地存储于存储器, 则对于检索到的路径信息,能够在短时间访问与该路径信息相关的可靠度, 并能够立即变更显示方式。
[0152]
本实施方式的显示控制系统1将基于本车辆的位置信息的路径信息与第 一地图信息的路径信息不一致的路径信息的可靠度计算或评价得低。
[0153]
基于本车辆的位置信息的路径信息与第一地图信息的路径信息不一致是 指基于本车辆的位置信息的路径信息是不存在于第一地图信息的路径信息。
[0154]
如果基于本车辆的位置信息的路径信息是不存在于第一地图信息的路径 信息,则不存在推荐度,因此与除此以外的参数的等级无关地,可靠度的等 级当然低。
[0155]
本实施方式的显示控制系统1在存在多个推荐度与基于本车辆的位置信 息的路径信息的推荐度为相同等级的推荐路径信息的情况下,将推荐路径信 息的可靠度计算或评价得低。
[0156]
在存在多个推荐度与基于本车辆的位置信息的路径信息的推荐度为相同 等级的推荐路径信息的情况下,在任意的推荐路径本车辆都有可能行驶。
[0157]
因此,在存在多个推荐度与基于本车辆的位置信息的路径信息的推荐度 为相同等级的推荐路径信息的情况下,通过将推荐路径信息的可靠度计算或 者评价得低,从而无论在本车辆在哪个推荐路径行驶的情况下,均能够使车 辆的乘员预先认识到,并缓和车辆的乘员的不适感。
[0158]
本实施方式的显示控制系统1以将推荐度为相同等级的多个路径信息持 续显示于显示部140的方式进行控制。
[0159]
在存在多个推荐度与基于本车辆的位置信息的路径信息的推荐度为相同 等级的推荐路径信息的情况下,在任意的推荐路径本车辆都有可能行驶。
[0160]
因此,在存在多个推荐度与基于本车辆的位置信息的路径信息的推荐度 为相同等级的推荐路径信息的情况下,通过将推荐路径信息的可靠度计算或 评价得低,并将这些推荐路径信息在本车辆行驶过程中也持续显示,从而无 论在本车辆在哪个推荐路径行驶的情况下,均能够使车辆的乘员预先认识到, 并缓和车辆的乘员的不适感。
[0161]
本实施方式的显示控制系统1将在车辆偏离了最初的路径的情况下执行 的路径重新检索次数为一定数量以上的路径信息的可靠度计算或评价得低。
[0162]
关于在车辆偏离了最初的路径的情况下执行的路径重新检索次数为一定 数量以上的路径信息,导航用地图与车辆侧的路径选择不匹配的可能性高。
[0163]
因此,通过将在车辆偏离了最初的路径的情况下执行的路径重新检索次 数为一定数量以上的路径信息的可靠度计算或评价得低,并进行该信息的显 示,从而能够使车辆的乘员预先认识到该信息,并缓和车辆的乘员的不适感。
[0164]
本实施方式的显示控制系统1将显示部140的显示区域成为预定区域以 上的路径信息的可靠度计算或评价得低。
[0165]
在此,“预定区域”能够例示为能够显示高精细地图的范围。
[0166]
即,在显示部140的显示区域为预定区域以上的情况下,例如,显示部 140的显示区域超过能够显示高精细地图的范围。
[0167]
因此,通过将显示部140的显示区域成为预定区域以上的路径信息的可 靠度计算或评价得低,并进行该信息的显示,从而能够使车辆的乘员预先认 识到该信息,并缓和车辆的乘员的不适感。
[0168]
《第二实施方式》
[0169]
使用图11至图13,对本实施方式的显示控制系统1进行说明。
[0170]
《处理器210a的构成》
[0171]
如图11所示,处理器210a被构成为包括驾驶主体判定部211、显示控 制信息生成部213a以及可靠度评价部214。
[0172]
应予说明,对于标记与第一实施方式相同的符号的构成要素,由于具有 相同的功能,因此省略其详细的说明。
[0173]
可靠度评价部214将与本车辆的位置信息相距预定距离的路径信息的可 靠度计算或评价得低。
[0174]
具体而言,例如,可靠度评价部214从车辆用导航装置100获取本车辆 的位置信息(纬度经度信息)、以及检索路径的位置信息(纬度经度信息), 并针对与本车辆的位置信息相距预定距离的路径信息,将其可靠度评价得低。
[0175]
在此,作为“预定距离”,一般是指识别为相当远的距离的距离,例如能 够例示为1km。
[0176]
显示控制信息生成部213a例如从车辆用导航装置100获取本车辆的位 置信息(纬度经度信息)、以及检索路径的位置信息(纬度经度信息),并针 对与本车辆的位置信息相距预定距离的路径信息,生成显示控制信息,将生 成的显示控制信息发送到显示控制部150。
[0177]
《显示控制系统1的处理》
[0178]
使用图12、图13,对本实施方式的显示控制系统1的处理进行说明。
[0179]
如图12所示,驾驶主体判定部211例如从搭载于车辆的车辆控制装置等 接收指示车辆是否是自动驾驶模式或者驾驶辅助模式的信息,并判定本车辆 的驾驶主体(步骤s101)。
[0180]
在驾驶主体判定部211判定为本车辆的驾驶主体不是车辆的情况下(步 骤s101的“否”),使处理返回到步骤s101。
[0181]
另一方面,在驾驶主体判定部211判定为本车辆的驾驶主体是车辆的情 况下(步骤s101的“是”),可靠度评价部214基于从车辆用导航装置100接 收到的、例如检索路径信息和本车辆的位置信息等来评价检索路径的可靠度 (步骤s201)。
[0182]
例如,可靠度评价部214针对与本车辆的位置信息相距预定距离(图13 的“l”)的路径信息,将其可靠度评价得低。
[0183]
显示控制信息生成部213a判定从可靠度评价部214得到的可靠度的评 估是否低(步骤s202)。
[0184]
在此,“可靠度的评价低”能够例示为比所有的可靠度评价的平均低的情 况。应予说明,评价判定的基准也可以适当变更。
[0185]
显示控制信息生成部213a在判定为该路径信息的可靠度低的情况下(步 骤s202的“是”),执行生成显示控制信息的可靠度显示处理,并结束处理。
[0186]
应予说明,显示控制信息生成部213a如图13所示,生成以点划线表示 检索路径那样的显示控制信息。
[0187]
另一方面,显示控制信息生成部213a在判定为该路径信息的可靠度不 低的情况下(步骤s202的“否”),生成使显示区域缩小的显示控制信息,并 结束处理。
[0188]
《作用
·
效果》
[0189]
如以上说明的那样,本实施方式的显示控制系统1将与本车辆的位置信 息相距预定距离的路径信息的可靠度评价得低。
[0190]
在与本车辆的位置信息相距预定距离的路径中,除了该路径以外还存在 其他候选路径的可能性高。
[0191]
因此,通过将与本车辆的位置信息相距预定距离的路径的可靠度评价得 低,并变更显示方式,从而使车辆的乘员事前预先认识到在自动驾驶模式或 者驾驶辅助模式中发生的未预期的路径变更,由此,能够缓和车辆的乘员的 不适感。
[0192]
《变形例1》
[0193]
在第一实施方式中,示出了变更不包含于第一地图信息的路径的显示方 式的情况,但也可以在本车辆在第一地图信息中没有的路径行驶的情况下, 显示该行驶的轨迹,并将该轨迹存储于车辆用导航装置100。
[0194]
如此,如果保存在第一地图信息中没有的路径行驶的轨迹,则在本车辆 在相同的路径行驶的情况下,能够迅速地在车辆用导航装置100侧变更该路 径的显示方式。
[0195]
《变形例2》
[0196]
在实施方式中说明的车辆用导航装置100为云(cloud)型导航装置的情 况下,在本车辆在第一地图信息中没有的路径行驶的情况下,将该行驶的轨 迹发送到云服务器并进行存储。
[0197]
通过如此进行处理,在本车辆再次在相同的路径行驶的情况下,能够在 从云服务器接收数据的时刻,以变更了该路径的显示方式的显示方式进行显 示。
[0198]
应予说明,能够通过将处理器210的处理记录于计算机系统能够读取的 记录介质,并将记录于该记录介质的程序读入存储器220并执行,从而实现 本发明的显示控制系统。这里所说的计算机系统包括os、周边装置等硬件。
[0199]
此外,“计算机系统”如果是利用www(world wide web:万维网) 系统的情况,则还包括提供主页的环境(或者显示环境)。此外,上述程序也 可以从将该程序储存于存储装置等的计算机系统经由传输介质或者通过传输 介质中的传输波传输到其他计算机系统。在此,传输程序的“传输介质”是 指如因特网等网络(通信网)、电话线路等通信线路(通信线)那样具有传输 信息的功能的介质。
[0200]
此外,上述程序也可以是用于实现上述功能的一部分的程序。进一步地, 还可以是能够通过与已经记录于计算机系统的程序的组合来实现上述功能的、 所谓的差异文件(差异程序)。
[0201]
以上,参照附图对本发明的实施方式进行了详细说明,但具体的构成并 不限定于该实施方式,也包含不脱离本发明的主旨的范围的设计等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1