一种磁传感器模拟器的制作方法
1.本发明属于航空电子装备计量检测技术领域,具体涉及一种磁传感器模拟器。
背景技术:
2.磁传感器因为其特点和优势在日常生活中被广泛应用,它可以被制成磁编码器、位移传感器、转速传感器、气象传感器和航向传感器等。磁传感器能够感应和测量附近的环境磁场,包括地磁场。磁传感器一般被用在各种导航系统或者定向系统中,是获得方位信息的重要仪器。磁传感器在航空领域也被广泛应用,飞机安装有用于对飞机的磁航向进行标定的磁传感器,通过磁传感器感知地磁场变化,机载磁航向系统通过对磁传感器输出信号进行处理,实现对飞机磁航向的标定。磁传感器本身也有其固有的缺点:价格昂贵、容易损坏、准确度易受到强磁场的磁化而降低。目前,对机载磁航向系统进行维修或调试时使用原装磁传感器,原装磁传感器容易受到测试环境中的各种铁磁物质干扰,例如环境建筑物中的钢筋、环境周边的各种电子设备等,因此机载磁航向系统的维修或调试对场地要求极高,环境干扰带来的测量误差也将大,并且难以克服。
3.由此,使用原装磁传感器对机载磁航向系统进行维修或调试,带来工作投入大、性能测试工作难以开展以及测试结果准确度低等缺陷。通过对输入机载磁航向系统的磁传感器输出信号进行模拟,进而对机载磁航向系统进行性能测试的方案相比使用原装磁传感器而言更具经济性、实用性和可行性,因此针对磁传感器的模拟实现具有较高的应用价值和广阔的市场前景。
技术实现要素:
4.本发明的目的在于克服现有技术的一项或多项不足,提供一种磁传感器模拟器。
5.本发明的目的是通过以下技术方案来实现的:一种磁传感器模拟器,包括arm主控模块、fpga模块、dac转换模块、电子斯科特变压模块、交互显示模块和输出接口;所述arm主控模块分别与所述交互显示模块和所述fpga模块连接;所述dac转换模块分别与fpga模块和所述电子斯科特变压模块连接,所述电子斯科特变压模块还与所述输出接口连接;所述交互显示模块用于生成第一控制信号,所述第一控制信号包含有角度值信息;所述arm主控模块用于根据角度值信息生成第二控制信号,并将所述第二控制信号经fpga模块发送至dac转换模块;所述dac转换模块用于根据所述第二控制信号分别生成同频率的第一正弦信号和第二正弦信号,并将所述第一正弦信号和第二正弦信号发送至所述电子斯科特变压模块;其中,所述第一正弦信号和第二正弦信号的相位差为
휋
/2;所述电子斯科特变压模块用于根据所述第一正弦信号和第二正弦信号生成三相
交流同步器信号,并将所述三相交流同步器信号发送至所述输出接口。
6.优选地,所述模拟器还包括滤波模块和放大模块,所述滤波模块的第一端与所述dac转换模块的输出端连接,滤波模块的第二端与所述电子斯科特变压模块的输入端连接,电子斯科特变压模块的输出端与所述放大模块的输入端连接,所述放大模块的输出端与所述输出接口连接。
7.优选地,所述交互显示模块包括显示模块和旋转编码器;所述arm主控模块分别与所述显示模块和所述旋转编码器连接;所述旋转编码器用于生成所述第一控制信号;所述arm主控模块还用于根据第一控制信号计算旋转编码器的旋转角度值,并将旋转角度值发送至所述显示模块。
8.优选地,所述模拟器还包括串口通信模块;所述串口通信模块与所述arm主控模块连接。
9.优选地,所述模拟器还包括励磁信号生成模块,所述励磁信号生成模块与所述输出接口连接,所述励磁信号生成模块用于生成第一励磁基准信号和第二励磁基准信号。
10.优选地,所述模拟器还包括电源模块,所述电源模块分别与所述arm主控模块、fpga模块、dac转换模块和电子斯科特变压模块连接。
11.本发明的有益效果是:(1)、基于磁传感器输出的三轴(x轴、y轴和z轴)感应电动势分量信号的幅度与旋转角度值的对应关系与自整角机相同,通过arm主控模块对交互显示模块设置的旋转角度值进行计算,得到幅度值信息, dac转换模块根据幅度值信息对应生成第一正弦信号和第二正弦信号,所述第一正弦信号和第二正弦信号即为输入电子斯科特变压模块的分解器信号,电子斯科特变压模块进一步根据分解器信号生成三相交流同步器信号,三相交流同步器信号的每一相信号分别对应磁传感器输出的一个轴的感应电动势分量信号,由此实现了对磁传感器输出信号的模拟。
12.将三相交流同步器信号输入机载磁航向系统,磁航向系统完成航向定位和显示,检测者通过交互显示模块显示的旋转角度值与机载磁航向系统的航向定位情况进行比对,实现对机载磁航向系统的性能检测;综上所述,基于磁传感器模拟器的实现,进而制定机载磁航向系统性能测试方案,相比使用原装磁传感器而言,更具经济性和实用性,极大地节省了航空电子设备计量检测的成本。
13.(2)、通过arm主控模块、fpga模块和旋转编码器的结合,极大地减少了磁传感器模拟器的体积和重量,小巧轻便,可同时适用于机载磁航向系统的外场原位检测和内场定点检测,实用性强。
14.(3)、一般的,磁传感器分为不带励磁线的磁传感器和带励磁线的磁传感器。通过励磁信号生成模块对带励磁线的磁传感器输出的第一励磁基准信号和第二励磁基准信号的模拟,使得磁传感器模拟器能同时兼容对带励磁线的磁传感器的模拟,据此也实现了对多类型磁航向系统的性能检测。
附图说明
15.图1为实施例一对应的磁传感器模拟器的一种逻辑框图;图2为实施例二对应的磁传感器模拟器的一种逻辑框图;图3为arm主控模块的一种原理图;图4为fpga模块的第一部分原理图;图5为fpga模块的第二部分原理图;图6为fpga模块的第三部分原理图;图7为fpga模块的第四部分原理图;图8为串口通信模块的一种原理图;图9为隔离型dcdc转换器的一种原理图;图10为dac转换模块的一种原理图;图11为滤波模块的一种原理图;图12为电子斯科特变压模块的一种原理图;图13为放大模块的一种原理图。
具体实施方式
16.下面将结合实施例,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
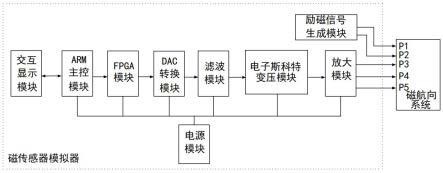
17.实施例一如图1所示,本实施例提供了一种磁传感器模拟器,实现对带励磁线的磁传感器的模拟,适用于连接有此类磁传感器的磁航向系统的性能测试,其中与磁航向系统连接的磁传感器将信号输出至磁航向系统的三个感应电动势分量信号接入端和两个励磁基准信号接入端,三个感应电动势分量信号接入端分别为第一接入端p3、第二接入端p4和第三接入端p5,两个励磁基准信号接入端分别为第一励磁基准接入端p1和第二励磁基准接入端p2。如图1所示,磁传感器模拟器包括电源模块、arm主控模块、fpga模块、dac转换模块、滤波模块、电子斯科特变压模块、放大模块、交互显示模块、输出接口和励磁信号生成模块。
18.arm主控模块分别与交互显示模块和fpga模块连接,dac转换模块分别与fpga模块和滤波模块连接,电子斯科特变压模块分别与滤波模块和放大模块连接,输出接口分别与励磁信号生成模块和放大模块连接,电源模块分别与arm主控模块、fpga模块、dac转换模块、滤波模块、电子斯科特变压模块、放大模块和励磁信号生成模块连接,放大模块的第一输出端用于经输出接口与磁航向系统的第一接入端p3连接,放大模块的第二输出端用于经输出接口与磁航向系统的第二接入端p4连接,放大模块的第三输出端用于经输出接口与磁航向系统的第三接入端p5连接。励磁信号生成模块的第一输出端用于经输出接口与磁航向系统的第一励磁基准接入端p1连接,励磁信号生成模块的第二输出端用于经输出接口与磁航向系统的第二励磁基准接入端p2连接。
19.交互显示模块用于生成第一控制信号,所述第一控制信号包含有角度值信息。角度值信息包含检测者设置的角度值,角度值范围为0
°‑
360
°
,其中0
°
对应于地磁北极(n),
90
°
对应于东(e),其他角度值按此设定与相应的地磁方位对应。
20.arm主控模块用于根据角度值信息生成第二控制信号,并将第二控制信号经fpga模块发送至dac转换模块的控制端。其中fpga模块与arm主控模块之间采用fsmc通信协议。arm主控模块与fpga模块结合,使得磁传感器模拟器输出信号的建立时间更快,基于fpga模块良好的可扩展性能,磁传感器模拟器可同时兼容多个不同型号的磁航向系统的性能测试。
21.dac转换模块用于根据第二控制信号分别生成同频率的第一正弦信号和第二正弦信号,并将第一正弦信号和第二正弦信号发送至滤波模块。第一正弦信号和第二正弦信号的相位差为
휋
/2。经滤波处理后的第一正弦信号和第二正弦信号即为输入电子斯科特变压模块的分解器信号。
22.电子斯科特变压模块用于根据滤波后的第一正弦信号和第二正弦信号生成三相交流同步器信号,然后将三相交流同步器信号输出至放大模块,经放大模块处理后的第一相交流同步器信号经放大模块的第一输出端输出至磁航向系统,经放大模块处理后的第二相交流同步器信号经放大模块的第二输出端输出至磁航向系统,经放大模块处理后的第三相交流同步器信号经放大模块的第三输出端输出至磁航向系统。
23.励磁信号生成模块用于输出第一励磁基准信号和第二励磁基准信号,第一励磁基准信号经励磁信号生成模块的第一输出端输出至磁航向系统,第二励磁基准信号经励磁信号生成模块的第二输出端输出至磁航向系统。
24.优选地,电源模块包括可充电电池单元,使得磁传感器模拟器适用于在外场灵活点位开展的磁航向系统性能测试。
25.优选地,交互显示模块包括显示模块和旋转编码器。arm主控模块分别与显示模块和旋转编码器连接,旋转编码器用于生成包含有角度值信息的第一控制信号。其中显示模块为四位数码管。检测者预设置或调节角度值时,通过对旋转编码器进行旋转,arm主控模块接收旋转编码器的感应信号,计算得到对应的旋转角度值,四位数码管对该旋转角度值进行显示。
26.优选地,模拟器还包括串口通信模块,串口通信模块与arm主控模块连接,并且串口通信模块还用于与外部上位机连接,检测者可通过外部上位机进行角度值设置或调节,以及读取所设置或调节的角度值。
27.如图3、图8和图9所示,电源模块包含有隔离型dcdc转换器up,隔离型dcdc转换器up实现输入端vin电压信号与其输出端+vo电压信号之间的高隔离度,其中隔离型dcdc转换器up输入端vin输入+5v电压,隔离型dcdc转换器up的输出端+vo输出与+5v电压隔离的+5ve电压,隔离型dcdc转换器up的输出端+vo还分别与第二十八电阻rp1的第一端和第四十一电容cp2的第一端连接,第二十八电阻rp1的第二端和第四十一电容cp2的第二端均连接至第一地端egnd1,隔离型dcdc转换器up的gnd端连接至第二地端gnd,隔离型dcdc转换器up的gnd端与隔离型dcdc转换器up的输入端vin之间还串接有第四十二电容cp1。串口通信模块包括隔离型rs485收发器u6,隔离型rs485收发器u6采用的型号为adm2483brw。arm主控模块包括单片机u3,单片机u3采用的型号为stm32f103vet6。隔离型rs485收发器u6经rs485连接器与外部的上位机连接。隔离型rs485收发器u6的a端与rs485连接器的第一差分端连接,且隔离型rs485收发器u6的a端还分别与第一电阻ro3的第一端和第一tvs二极管do3的负极连
接,第一电阻ro3的第二端连接至+5ve,第一tvs二极管do3的正极接至第一地端egnd1,隔离型rs485收发器u6的b端与rs485连接器的第二差分端连接,隔离型rs485收发器u6的b端还分别与第二电阻ro1的第一端和第二tvs二极管do1的负极连接,第二电阻ro1的第二端连接至第一地端egnd1,第二tvs二极管do1的正极接至第一地端egnd1,隔离型rs485收发器u6的a端和隔离型rs485收发器u6的b端之间连接有第三电阻ro2,第三tvs二极管do2的正极与隔离型rs485收发器u6的a端连接,第三tvs二极管do2的负极与隔离型rs485收发器u6的b端连接,隔离型rs485收发器u6的txd端与单片机u3的pa9端连接,隔离型rs485收发器u6的rxd端与单片机u3的pa10端连接, 隔离型rs485收发器u6的re端和de端均与单片机u3的pa8端连接,隔离型rs485收发器u6的vdd1端连接至3.3v,隔离型rs485收发器u6的vdd2端连接至+5ve,隔离型rs485收发器u6的gnd1端连接至第二地端gnd,隔离型rs485收发器u6的gnd2端连接至第一地端egnd1。单片机u3的osc_in端经第一电容c11接至第二地端gnd,单片机u3的osc_out端经第二电容c12接至第二地端gnd,单片机u3的osc_in端和osc_out端之间连接有第一晶振y1,单片机u3的nrst端经第三电容c13接至第二地端gnd,单片机u3的boot0端经第四电阻r6连接至第二地端gnd,单片机u3的vdda端和vref+端均连接至+3.3v,单片机u3的vdda端还分别与第四电容c14的第一端和第五电容c15的第一端连接,第四电容c14的第二端和第五电容c15的第二端均接至第二地端gnd,单片机u3的vref-端和vssa端均接至第二地端gnd,单片机u3的vdd1端、单片机u3的vdd2端、单片机u3的vdd3端、单片机u3的vdd4端和单片机u3的vdd5端均连接至+3.3v,单片机u3的vss1端、单片机u3的vss2端、单片机u3的vss3端、单片机u3的vss4端和单片机u3的vss5端均连接至第二地端gnd,单片机u3的vdd5端与单片机u3的vss5端之间连接有第六电容c21,单片机u3的vdd4端与单片机u3的vss4端之间连接有第七电容c20,单片机u3的vdd3端与单片机u3的vss3端之间连接有第八电容c19,单片机u3的vdd3端与单片机u3的vss3端之间还连接有第九电容c18,单片机u3的vdd2端与单片机u3的vss2端之间连接有第十电容c17,单片机u3的vdd1端与单片机u3的vss1端之间连接有第十一电容c16。
28.如图4、图5、图6、图7和图10所示,fpga模块包括八个bank单元、一个时钟单元和一个第二晶振x1,八个bank单元和一个时钟单元u8i为一体化芯片,一体化芯片的型号为ep4ce6e22c8n。dac转换模块包括两个da芯片,分别为第一da芯片u14和第二da芯片u18,第一da芯片u14和第二da芯片u18采用的型号为ad5761r,第一da芯片u14和第二da芯片u18均包括四个与fpga模块连接的控制端,分别为sclk端、sync端、sdi端和sdo端。八个bank单元分别为第一bank单元u8a、第二bank单元u8b、第三bank单元u8c、第四bank单元u8d、第五bank单元u8e、第六bank单元u8f、第七bank单元u8g和第八bank单元u8h。时钟单元u8i的第88引脚与单片机u3的pb2端连接,第二晶振x1的out端与时钟单元u8i的第23引脚连接,第二晶振x1的vcc端连接至+3.3v,且第二晶振x1的vcc端还经第十二电容c42接地。第一bank单元u8a的第1引脚与第一da芯片u14的sclk端连接,第一bank单元u8a的第2引脚与第一da芯片u14的sync端连接,第一bank单元u8a的第3引脚与第一da芯片u14的sdi端连接,第一bank单元u8a的第7引脚与第一da芯片u14的sdo端连接,第八bank单元u8h的第141引脚与第二da芯片u18的sclk端连接,第八bank单元u8h的第142引脚与第二da芯片u18的sync端连接,第八bank单元u8h的第143引脚与第二da芯片u18的sdi端连接,第八bank单元u8h的第144引脚与第二da芯片u18的sdo端连接。
29.第一da芯片u14的vrefin端经第十三电容c60连接至第三地端agnd,第一da芯片u14的agnd端接至第三地端agnd,第一da芯片u14的vss端分别与第十四电容c66的第一端和第十五电容c67的第一端连接,第十四电容c66的第二端和第十五电容c67的第二端均连接至第三地端agnd,第一da芯片u14的vdd端分别与第十六电容c71的第一端和第十七电容c74的第一端连接,第十六电容c71的第二端和第十七电容c74的第二端均连接至第三地端agnd,第一da芯片u14的dgnd端分别与第十八电容c55的第一端和第十九电容c56的第一端连接,第十八电容c55的第二端和第十九电容c56的第二端均连接至第一da芯片u14的dvcc端,第一da芯片u14的dvcc端连接至+3.3v,第一da芯片u14的dgnd端和ldac端均连接至第二地端gnd,第一da芯片u14的vout端输出第一正弦信号。
30.第二da芯片u18的vrefin端经第二十电容c82连接至第三地端agnd,第二da芯片u18的agnd端接至第三地端agnd,第二da芯片u18的vss端分别与第二十一电容c88的第一端和第二十二电容c89的第一端连接,第二十一电容c88的第二端和第二十二电容c89的第二端均连接至第三地端agnd,第二da芯片u18的vdd端分别与第二十三电容c93的第一端和第二十四电容c96的第一端连接,第二十三电容c93的第二端和第二十四电容c96的第二端均连接至第三地端agnd,第二da芯片u18的dgnd端分别与第二十五电容c77的第一端和第二十六电容c78的第一端连接,第二十五电容c77的第二端和第二十六电容c78的第二端均连接至第二da芯片u18的dvcc端,第二da芯片u18的dvcc端连接至+3.3v,第二da芯片u18的dgnd端和ldac端均连接至第二地端gnd,第二da芯片u18的vout端输出第二正弦信号。
31.如图11所示,滤波模块包括两个巴特沃斯低通滤波器,分别为第一巴特沃斯低通滤波器和第二巴特沃斯低通滤波器,第一巴特沃斯低通滤波器包括型号为op07的第一运算放大器u16,第二巴特沃斯低通滤波器包括型号为op07的第二运算放大器u20。第一运算放大器u16的正极输入端依序经第五电阻r24、第六电阻r28和第七电阻r27后连接至第一da芯片u14的vout端,第一运算放大器u16的正极输入端还经第二十七电容c62连接至第三地端agnd,第一运算放大器u16的负极输入端与第一运算放大器u16的输出端连接,第一运算放大器u16的输出端还与第二十八电容c72的第一端连接,第二十八电容c72的第二端连接至第六电阻r28和第七电阻r27的串接端,第一运算放大器u16的正偏置端连接至+15v,第一运算放大器u16的负偏置端连接至-15v,第一运算放大器u16的正偏置端还与第二十九电容c58的第一端连接,第二十九电容c58的第二端连接至第三地端agnd,第一运算放大器u16的负偏置端还与第三十电容c68的第一端连接,第三十电容c68的第二端连接至第三地端agnd。第二运算放大器u20的正极输入端依序经第八电阻r30、第九电阻r34和第十电阻r33后连接至第二da芯片u18的vout端,第二运算放大器u20的正极输入端还经第三十一电容c84连接至第三地端agnd,第二运算放大器u20的负极输入端与第二运算放大器u20的输出端连接,第二运算放大器u20的负极输入端还与第三十二电容c94的第一端连接,第三十二电容c94的第二端连接至第九电阻r34和第十电阻r33的串接端,第二运算放大器u20的正偏置端连接至+15v,第二运算放大器u20的负偏置端连接至-15v,第二运算放大器u20的正偏置端还与第三十三电容c80的第一端连接,第三十三电容c80的第二端连接至第三地端agnd,第二运算放大器u20的负偏置端还与第三十四电容c90的第一端连接,第三十四电容c90的第二端连接至第三地端agnd,第一运算放大器u16的输出端输出滤波后的第一正弦信号,第二运算放大器u20的输出端输出滤波后的第二正弦信号。
32.如图12所示,电子斯科特变压模块包括四个运算放大器,分别为第三运算放大器u30、第四运算放大器u33、第五运算放大器u39和第六运算放大器u36,四个运算放大器采用的型号均为op07。第三运算放大器u30的正极输入端与第一运算放大器u16的输出端连接,第三运算放大器u30的负极输入端与第三运算放大器u30的输出端连接,第三运算放大器u30的正偏置端连接至+15v,第三运算放大器u30的负偏置端连接至-15v,第一运算放大器u16的输出端还经第十一电阻r69与第六运算放大器u36的负极输入端连接,第六运算放大器u36的负极输入端还经第十二电阻r51与第六运算放大器u36的输出端连接,第六运算放大器u36的正极输入端连接至第三地端agnd,第六运算放大器u36的正偏置端连接至+15v,第六运算放大器u36的负偏置端连接至-15v,第一运算放大器u16的输出端还与第十三电阻r77的第一端连接,第十三电阻r77的第二端分别与第十四电阻r74的第一端和第五运算放大器u39的负极输入端连接,第十四电阻r74的第二端与第五运算放大器u39的输出端连接,第五运算放大器u39的正极输入端连接至第三地端agnd,第五运算放大器u39的正偏置端连接至+15v,第五运算放大器u39的负偏置端连接至-15v,第二运算放大器u20的输出端分别与第十五电阻r81的第一端和第十六电阻r65的第一端连接,第十五电阻r81的第二端与第十三电阻r77的第二端连接,第十六电阻r65的第二端分别与第十七电阻r52的第一端和第四运算放大器u33的负极输入端连接,第十七电阻r52的第二端分别与第四运算放大器u33的输出端和第十八电阻r57的第一端连接,第十八电阻r57的第二端与第六运算放大器u36的负极输入端连接,第四运算放大器u33的正极输入端连接至第三地端agnd,第四运算放大器u33的正偏置端连接至+15v,第四运算放大器u33的负偏置端连接至-15v,第三运算放大器u30的输出端输出第一相交流同步器信号x1,第六运算放大器u36的输出端输出第二相交流同步器信号y1,第五运算放大器u39的输出端输出第三相交流同步器信号z1。
33.如图13所示,放大模块包括第七运算放大器u13、第八运算放大器u17和第九运算放大器u15,第七运算放大器u13、第八运算放大器u17和第九运算放大器u15采用的型号均为op07。第七运算放大器u13的负极输入端经第十九电阻r23与第三运算放大器u30的输出端连接,第七运算放大器u13的负极输入端还经第二十电阻r10与第七运算放大器u13的输出端连接,第七运算放大器u13的正极输入端经第二十一电阻r29连接至第三地端agnd,第八运算放大器u17的负极输入端经第二十二电阻r26与第六运算放大器u36的输出端连接,第八运算放大器u17的负极输入端还经第二十三电阻r21与第八运算放大器u17的输出端连接,第八运算放大器u17的正极输入端经第二十四电阻r32连接至第三地端agnd,第九运算放大器u15的负极输入端经第二十五电阻r25与第五运算放大器u39的输出端连接,第九运算放大器u15的负极输入端还经第二十六电阻r11连接至第九运算放大器u15的输出端,第九运算放大器u15的正极输入端经第二十七电阻r31连接至第三地端agnd,第七运算放大器u13的正偏置端连接至+15v,第七运算放大器u13的负偏置端连接至-15v,第八运算放大器u17的正偏置端连接至+15v,第八运算放大器u17的负偏置端连接至-15v,第九运算放大器u15的正偏置端连接至+15v,第九运算放大器u15的负偏置端连接至-15v,第七运算放大器u13的正偏置端还经第三十五电容c1连接至第三地端agnd,第七运算放大器u13的负偏置端还经第三十六电容c4连接至第三地端agnd,第八运算放大器u17的正偏置端还经第三十七电容c3连接至第三地端agnd,第八运算放大器u17的负偏置端还经第三十八电容c53连接至第三地端agnd,第九运算放大器u15的正偏置端还经第三十九电容c2连接至第三地端agnd,
第九运算放大器u15的负偏置端还经第四十电容c5连接至第三地端agnd,第七运算放大器u13的输出端(放大模块的第一输出端)输出经放大处理后的第一相交流同步器信号x1,第八运算放大器u17的输出端(放大模块的第二输出端)输出经放大处理后的第二相交流同步器信号y1,第九运算放大器u15的输出端(放大模块的第三输出端)输出经放大处理后的第三相交流同步器信号z1。
34.以下基于对安装有ghc-xx系列磁传感器的磁航向系统进行检测为例说明三相交流同步器信号的生成过程以及磁航向系统的检测过程。
35.三相交流同步器信号的生成过程如下:(1)、arm主控模块根据检测者设定的角度值a,计算sin项幅度值a1和cos项幅度值a2,其中a1=sina,;(2)、将sin项幅度值a1和cos项幅度值a2传输至fpga模块,由fpga模块将sin项幅度值a1输入第一da芯片u14的控制端,由fpga模块将cos项幅度值a2输入第二da芯片u18的控制端;(3)、第一da芯片u14根据其控制端输入的sin项幅度值a1生成第一正弦信号y1=a1sin(wt+
휃1),第二da芯片u18根据其控制端输入的cos项幅度值a2生成第二正弦信号y2=a2sin(wt+
휃2),其中第一相位值
휃1和第二相位值
휃2相位差
휋
/2,w表示角速度,第一正弦信号y1和第二正弦信号y2的频率为800mhz;(4)、电子斯科特变压模块根据第一正弦信号和第二正弦信号生成相位差为120度的三相交流同步器信号,经放大模块处理后,三相交流同步器信号的电压幅值为毫伏级,本实施例生成的三相交流同步器信号的电压幅值为40mv。
36.磁航向系统的检测过程如下:将磁传感器模拟器通过输出接口与受检的磁航向系统连接,开启磁传感器模拟器电源,检测者通过转动旋转编码器设定旋转角度值,或通过外部的上位机设定旋转角度值,观察磁航向系统的航向定位显示情况,判断航向定位显示情况与设定的旋转角度值是否一致;检测者再次设定旋转角度值,开展下一次测试。
37.实施例二如图2所示,实施例二与实施例一的区别在于:实施例二实现对不带励磁线的磁传感器的模拟,适用于连接有此类磁传感器的磁航向系统的性能测试,其中与磁航向系统连接的磁传感器将信号输出至磁航向系统的三个感应电动势分量信号接入端,三个感应电动势分量信号接入端分别为第一接入端p3、第二接入端p4和第三接入端p5,磁传感器模拟器未设置励磁信号生成模块。
38.以上所述仅是本发明的优选实施方式,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1