一种基于机车工况下的钛酸锂电池模组荷电状态估计方法
1.本发明属于锂电池技术领域,特别是涉及一种基于机车工况下的钛酸锂电池模组荷电状态估计方法。
背景技术:
2.随着全球能源危机与环境污染逐渐加重,寻找新型可替代化石能源的清洁能源已成为全人类迫在眉睫的重大问题。其中,锂离子电池以能量高、储能效率高和寿命长的优点正受到越来越多的关注。钛酸锂电池作为现代有轨电车的重要动力源已成为发展趋势。及时准确的监测电池的荷电状态(state of charge,soc)对于保障机车安全、稳定运行具有重大意义。
3.电池的荷电状态反映电池的剩余容量状况,即在一定的放电倍率下,当前电池的剩余容量与总的可用容量的比值。由于锂离子电池的荷电状态并不能直接由设备测量,所以对于soc如何进行间接测量和估算,以及如何使得估算结果更为精确,便成为一大重要课题。
4.目前,传统soc估计方法主要通过实验方法直接测量得出,例如安时积分法、开路电压法。上述方法简单直观,但实验耗时耗力、测量精度不高以及对soc初始值极度依赖。基于模型的滤波算法一定程度上解决了因缺少初始值以及噪声对估算准确度的影响,但另一方面该方法对soc估计准确度十分依赖电池模型的特性,而电池模型随着温度以及老化而改变,从而导致很难估计出整个生命周期的soc。
5.鉴于以上方法的不足之处,学者们更多研究基于数据驱动的方法,从大量的测量数据建立与soc的非线性映射,从而准确估计出soc,但仍有三点有待改进之处:1)目前应用于实际工况的soc估计极大部分均为汽车工况,对机车工况下的soc估计方法不足;2)大部分soc估计研究者工作重心放在单体电池输入特征量如何选择上,而针对锂离子电池模组如何选取输入特征量鲜有研究;3)很多研究者根据经验设置用于估算的数据驱动方法的超参数,具有很强的随机性,对预测效果具有不小的影响。
技术实现要素:
6.为了解决上述问题,本发明提出了一种基于机车工况下的钛酸锂电池模组荷电状态估计方法,采用基于数据驱动的锂电池soc估计,利用鲸鱼算法优化长短时神经网络超参数,有效实现了工况条件下钛酸锂电池模组soc的准确估计。
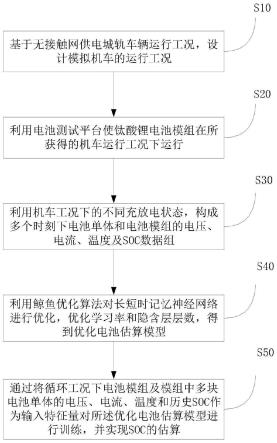
7.为达到上述目的,本发明采用的技术方案是:一种基于机车工况下的钛酸锂电池模组荷电状态估计方法,包括步骤:
8.s10,基于无接触网供电城轨车辆运行工况,设计模拟机车的运行工况;
9.s20,利用电池测试平台使钛酸锂电池模组在所获得的机车运行工况下运行;
10.s30,利用机车工况下的不同充放电状态,构成多个时刻下电池单体和电池模组的电压、电流、温度及soc数据组;
11.s40,利用鲸鱼优化算法对长短时记忆神经网络进行优化,优化学习率和隐含层层数,得到优化电池估算模型;
12.s50,通过将循环工况下电池模组及模组中多块电池单体的电压、电流、温度和历史soc作为输入特征量对所述优化电池估算模型进行训练,并实现soc的估算。
13.进一步的是,在所述步骤s10中,基于无接触网供电城轨车辆运行工况,设计模拟机车的运行工况,包括:
14.根据无接触网供电城轨车辆典型工况进行约1/7缩比,该工况的完整启停阶段包括:车辆启动加速阶段,随后进入匀速运行阶段;进行制动能量回收,后到站停止。
15.进一步的是,利用电池测试平台对钛酸锂电池模组置于不同温度下进行循环测试,并测得钛酸锂电池模组和其中各个单体电池的电压、电流、温度及soc数据组。
16.进一步的是,在所述步骤s40中,采用鲸鱼优化算法对长短时记忆神经网络进行优化,根据鲸鱼个体适应度值记录最优及全局最优位置;
17.利用更新的收敛因子计算出新系数向量a,并更新系数向量c:
[0018][0019][0020]
c=2
·
rand;
[0021]
上式中,t表示迭代次数;表示收敛因子,其数值从2线性减少到0;rand表示[0,1]之间的随机数;t
max
表示最大迭代次数;a和c表示系数向量,在计算过程中通过不断调节向量a和c的数值从而寻找x最优解周围位置。
[0022]
进一步的是,在所述步骤s40中,随机生成一个[0,1]的随机数p,根据p大小判断算法采用何种更新位置的方法进行lstm中学习率和隐含层层数的优化;
[0023]
若p>0.5则采用螺旋位置更新法,其函数公式如下:
[0024]
d=|c
·
x
*
(t)-x(t)|;
[0025]
x(t+1)=x
*
(t)-a
·
d;
[0026]
上式中,t代表迭代次数,d为t时刻种群内个体与最优个体之间的距离,x
*
(t)为t时刻猎物的位置向量,x(t)为t时刻其余鲸鱼的向量位置;
[0027]
若p<0.5且|a|<1时,则进入猎物包围阶段,其函数公式:
[0028]
d=|c
·
x
rand
(t)-x(t)|;
[0029]
x(t+1)=x
rand
(t)-a
·
d;
[0030]
上式中,x
rand
(t)表示t时刻随机选中的鲸鱼个体位置;
[0031]
若p<0.5且|a|>1,则进入搜索猎物阶段,其函数公式:
[0032]
x(t+1)=d
′
·ebl
·
cos(2πl)+x
*
(t);
[0033]d′
=|x
*
(t)-x(t)|;
[0034]
上式中,b用于定义对数螺旋形状,l为随机数[0,1]。
[0035]
进一步的是,根据计算新位置适应度值,更新个体最优和全局最优位置,判断是否到达迭代次数;
[0036]
若未达到迭代次数,则继续寻找个体最优和全局最优位置;若达到最优迭代次数,则输出最优学习率和隐含层函数,得到优化后的对长短时记忆神经网络。
[0037]
根据权利要求1或6所述的一种基于机车工况下的钛酸锂电池模组荷电状态估计
方法,其特征在于,采集到的电池数据集进行归一化处理,并将归一化的电池模组及其中多个单体电池的电压、电流、温度及soc数据集中进行训练,得到训练完成的优化电池估算模型,用于钛酸锂电池模组的荷电状态估计。
[0038]
采用本技术方案的有益效果:
[0039]
本发明提供了一种基于数据驱动的锂电池soc估计方法,将钛酸锂电池模组的多单体电池电压、温度以及模组电流、历史荷电状态作为输入特征量,针对有轨机车工况展开研究,利用鲸鱼算法优化长短时神经网络超参数,实现了工况条件下钛酸锂电池模组soc的准确估计。
[0040]
本发明不仅将长短时神经网络应用于钛酸锂电池组工况soc估计,提高了中长期估计的准确性,利用优化的鲸鱼算法对长短时神经网络结构中的学习率和隐含层层数进行学习迭代,克服了人为确定超参数的偶然性和偏差,将历史soc作为估计输入特征量提高了估算精度,对于提高机车控制性能和预测行驶里程具有重大意义,增加模组中多单体电池外特性作为输入特征量,提高了模组soc估计准确度,且一定程度上反映出多单体电池间耦合对整体模组的影响。而且将该估计方法应用于不同温度下的钛酸锂电池组工况soc估计,均具有较好的鲁棒性。
附图说明
[0041]
图1为本发明的一种基于机车工况下的钛酸锂电池模组荷电状态估计方法流程示意图;
[0042]
图2为本发明实施例中模拟机车工况电流示意图;
[0043]
图3为本发明实施例中优化电池估算模型实现soc估计流程示意图;
[0044]
图4为本发明实施例中25℃工况下不同算法对比示意图;
[0045]
图5为本发明实施例中图4选中部分的局部放大图。
具体实施方式
[0046]
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图对本发明作进一步阐述。
[0047]
在本实施例中,参见图1所示,本发明提出了一种基于机车工况下的钛酸锂电池模组荷电状态估计方法,包括步骤:
[0048]
s10,基于无接触网供电城轨车辆运行工况,设计模拟机车的运行工况;
[0049]
s20,利用电池测试平台使钛酸锂电池模组在所获得的机车运行工况下运行;
[0050]
s30,利用机车工况下的不同充放电状态,构成多个时刻下电池单体和电池模组的电压、电流、温度及soc数据组;
[0051]
s40,利用鲸鱼优化算法对长短时记忆神经网络进行优化,优化学习率和隐含层层数,得到优化电池估算模型;
[0052]
s50,通过将循环工况下电池模组及模组中多块电池单体的电压、电流、温度和历史soc作为输入特征量对所述优化电池估算模型进行训练,并实现soc的估算。
[0053]
作为上述实施例的优化方案,根据无接触网供电城轨车辆典型工况进行约1/7缩比,该工况的完整启停阶段包括:车辆在29秒前完成了启动加速阶段,随后进入匀速运行阶
段。在约53秒后进行制动能量回收,后在约71秒时到站停止。该典型工况牵引阶段电池模组最大放电为204a,持续3秒;匀速运行阶段放电电流为33a,持续25秒;制动能量回收阶段,最大充电电流为216a,持续6秒。
[0054]
利用电池测试平台对钛酸锂电池模组置于不同温度下进行循环测试,并测得钛酸锂电池模组和其中各个单体电池的电压、电流、温度及soc数据组。
[0055]
作为上述实施例的优化方案,采用鲸鱼优化算法对长短时记忆神经网络进行优化,根据鲸鱼个体适应度值记录最优及全局最优位置。
[0056]
利用更新的收敛因子计算出新系数向量a,并更新系数向量c:
[0057][0058][0059]
c=2
·
rand;
[0060]
上式中,t表示迭代次数;表示收敛因子,其数值从2线性减少到0;rand表示[0,1]之间的随机数;t
max
表示最大迭代次数;a和c表示系数向量,在计算过程中通过不断调节向量a和c的数值从而寻找x最优解周围位置。
[0061]
随机生成一个[0,1]的随机数p,根据p大小判断算法采用何种更新位置的方法进行lstm中学习率和隐含层层数的优化。
[0062]
若p>0.5则采用螺旋位置更新法,其函数公式如下:
[0063]
d=|c
·
x
*
(t)-x(t)|;
[0064]
x(t+1)=x
*
(t)-a
·
d;
[0065]
上式中,t代表迭代次数,d为t时刻种群内个体与最优个体之间的距离,x
*
(t)为t时刻猎物的位置向量,x(t)为t时刻其余鲸鱼的向量位置;
[0066]
若p<0.5且|a|<1时,则进入猎物包围阶段,其函数公式:
[0067]
d=|c
·
x
rand
(t)-x(t)|;
[0068]
x(t+1)=x
rand
(t)-a
·
d;
[0069]
上式中,x
rand
(t)表示t时刻随机选中的鲸鱼个体位置;
[0070]
若p<0.5且|a|>1,则进入搜索猎物阶段,其函数公式:
[0071]
x(t+1)=d
′
·ebl
·
cos(2πl)+x
*
(t);
[0072]d′
=|x
*
(t)-x(t)|;
[0073]
上式中,b用于定义对数螺旋形状,l为随机数[0,1]。
[0074]
根据计算新位置适应度值,更新个体最优和全局最优位置,判断是否到达迭代次数;若未达到迭代次数,则继续寻找个体最优和全局最优位置;若达到最优迭代次数,则输出最优学习率和隐含层函数,得到优化后的长短时记忆神经网络。
[0075]
作为上述实施例的优化方案,采集到的电池数据集进行归一化处理,并将归一化的电池模组及其中多个单体电池的电压、电流、温度及soc数据集中进行训练,得到训练完成的优化电池估算模型,应用于钛酸锂电池模组的荷电状态估计。
[0076]
根据如图2所示的模拟机车工况运行钛酸锂电池进行循环测试。并根据如图3采用优化电池估算模型实现soc估计。25℃工况下不同算法对比如图4所示。局部放大图如图5所示引入均方根误差(rmse)、平均绝对误差(mae)和最大绝对误差(me)评价指标来评估模型的预测结果,公式如下:
[0077][0078][0079]
me=max(|soc
′
(t)-soc(t)|)
[0080]
根据上述方案,分别验证本方法所选输入特征量历史soc、不同数量单体电池数据、环境温度对准确估计电池模组soc的影响,并得到各实验方案误差数据结果如表1所示。
[0081]
表1各实验方案误差数据结果
[0082][0083]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术
人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1