一种大平面测磁系统三维探头对轴方法与流程
1.本发明涉及测量;测试的技术领域,特别涉及一种水下磁测领域的大平面测磁系统三维探头对轴方法。
背景技术:
2.大平面测磁系统主要用于测试被测目标本体的磁场分布特征,并为消磁作业提供补偿依据。测磁系统通常按照一定的平面范围进行布设,探头按照等间隔的距离进行定点安装,在消磁作业前,测磁系统获取到被测目标的具体磁场分布图,并反馈至操作中心来指导消磁线圈的充电参数,形成符合磁场特征分布的反向抵消磁场,把被测目标本身的磁场特征消除掉,接着测磁系统再次获取消磁作业后的磁场分布图,检验消磁效果,并针对性的产生反向抵消磁场,继续消除不满足要求的区域,反复重复上述过程,直到满足要求。
3.测磁系统的核心单元为矢量磁通门磁力仪探头,可以获取到三个正交方向的轴向分量磁场,单个矢量磁力仪探头(简称:探头)可以获取到单点的矢量磁场数据,多个探头在同一平面按照等间隔布置后,可以组成探头矩阵,能够获取到平面上的矢量磁场分布图。为了实现上述目标,需要探头各轴向的方向一致,才能得到可靠的轴向数据,避免出现探头摆放不一致导致分量磁场输出不一致的现象。
4.三维探头的轴向组成三轴正交坐标系,分别获取到各轴向的磁场分量数据,通常记录为x分量、y分量、z分量;多个探头组成阵列,根据阵列内的各探头单元分别获得磁场分量数据,各探头的x分量组成x分量阵列数据、y分量组成y分量阵列数据、z分量组成z分量阵列数据,可以反映出测磁阵列的分量磁场剖面图,供系统进行性能评估。
5.为了实现上述目的,需要测磁阵列内部的各探头的x分量、y分量、z分量完全对轴,即各轴向方向具备一致性,根据推算,当各轴向的偏差超过
±1°
时,导致的磁场偏差将超过500nt,而系统要求的误差极限为20nt,轴向偏差超过
±1°
时的误差已远远超出系统要求的误差极限,若要满足系统要求,推算得出的轴向偏差误差应不大于
±
0.03
°
(磁场偏差≈17.7nt)。这在工程上是无法通过调节的方式实现的,无论是用手动的方式还是机械加工的方式,均无法确保在水下实现如此高精度的对轴要求,一则是系统的误差极限不大于20nt的要求,二则工程上无法实现高精度调节,故亟需一种方法实现两种情况的调和,使三维探头的高精度对轴得以实现,从而满足系统误差要求。
技术实现要素:
6.本发明解决了现有技术中存在的问题,提供了一种大平面测磁系统三维探头对轴方法,使大平面测磁系统的探头在水下布阵之后,探头的三维分量各自对轴,实现分量方向的一致性。
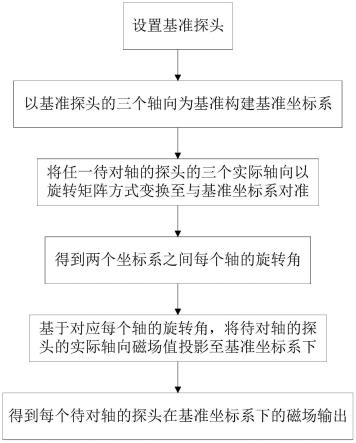
7.本发明所采用的技术方案是,一种大平面测磁系统三维探头对轴方法,所述方法设置基准探头,以基准探头的三个轴向为基准构建基准坐标系,将任一待对轴的探头的三个实际轴向以旋转矩阵方式变换至与基准坐标系对准,得到两个坐标系之间每个轴的旋转
角,基于对应每个轴的旋转角,将待对轴的探头的实际轴向磁场值投影至基准坐标系下,得到每个待对轴的探头在基准坐标系下的磁场输出。
8.优选地,建立基准探头的基准坐标系oxyz,任一待对轴的探头的实际坐标系为ox1y1z1;逐次对每个轴旋转,直至实际坐标系ox1y1z1与基准坐标系oxyz重合。
9.优选地,令实际坐标系ox1y1z1绕x1轴旋转的角度为a,得到中间过程坐标系ox1'y1'z1',满足
[0010][0011]
令中间过程坐标系ox1'y1'z1'绕y1'轴旋转角度b,得到中间过程坐标系ox2'y2'z2',满足
[0012][0013]
令中间过程坐标系ox2'y2'z2'绕z2'轴旋转角度c,得到与基准坐标系oxyz重合的坐标系ox3y3z3,满足
[0014][0015]
其中,x1、y1、z1为实际分量读数;
[0016]
x1'、y1'、z1'为旋转角度a之后,在坐标系ox1'y1'z1'上的读数;
[0017]
x2'、y2'、z2'为旋转角度b之后,在坐标系ox2'y2'z2'上的读数;
[0018]
x3、y3、z3为旋转角度c之后,在坐标系ox3y3z3上的读数。
[0019]
优选地,实际坐标系ox1y1z1与基准坐标系的关系矩阵为
[0020][0021]
优选地,获取基准探头在初始时刻的三个分量值xj,yj,zj和合成总场值tnorm,得到分量轴与合成总场的夹角aj,bj,cj;
[0022][0023][0024]
[0025][0026]
获取实际探头初始时刻的三个分量值x1,y1,z1和合成总场t1,
[0027][0028]
基于夹角aj,bj,cj获取实际探头初始时刻的合成总场t1在基准探头坐标系下的分量值x3、y3、z3,
[0029]
x3=t1*cos(aj)
[0030]
y3=t1*cos(bj)
[0031]
z3=t1*cos(cj)
[0032]
通过关系矩阵和x1、y1、z1和x3、y3、z3的值,得到对应x轴、y轴和z轴的旋转角度a、b、c。
[0033]
优选地,基于得到的旋转角度a、b、c,对实际探头后续每个时刻的分量值计算在基准坐标系下的投影值。
[0034]
优选地,每一时刻重复计算每个待对轴的探头在基准坐标系下的投影值。
[0035]
优选地,每个待对轴的探头的对轴相互独立。
[0036]
本发明的理论依据为,两个三维坐标系,当坐标圆心重合但坐标轴不重合时,可以按照一定规律依次旋转其中的一个坐标轴的三个轴向,从而使两个三维坐标系重合,旋转的角度为两个坐标系的旋转角,并可联立旋转矩阵来表示二者的关系,即当已知两个三维坐标系的旋转角时,可以通过旋转矩阵将二者进行等效变换,实现其中的一个坐标系在另外一个坐标系上的投影变换;基于该理论依据,为了实现大平面测磁系统三维探头对轴方法,当探头阵列布置完毕后,以其中的一个探头的三个轴向为基准坐标系,将其它探头的三个实际轴向根据旋转矩阵方式变换至基准坐标系,得到两个坐标系之间的旋转角,然后将实际轴向的磁场值投影至基准坐标系下,从而实现探头在同一基准坐标系下的磁场输出,各探头的旋转变换相互独立,可逐个探头依次完成,最终将探头阵列的所有探头投影到同一个基准坐标系下,实现三维探头的对轴。
[0037]
基于理论依据,本发明提出一种大平面测磁系统三维探头对轴方法,设置基准探头,以基准探头的三个轴向为基准构建基准坐标系,将任一待对轴的探头的三个实际轴向以旋转矩阵方式变换至与基准坐标系对准,得到两个坐标系之间每个轴的旋转角,基于对应每个轴的旋转角,将待对轴的探头的实际轴向磁场值投影至基准坐标系下,得到每个待对轴的探头在基准坐标系下的磁场输出。
[0038]
本发明的有益效果在于,解决了水下三维探头精确对轴的难题,通过建立三维坐标模型,以基准三维坐标轴为参考系,将实际坐标轴通过多组旋转变换矩阵进行坐标轴变换,得到基准三维坐标轴和实际坐标轴之间的数学模型,将各探头实际磁场数据依次投影在基准坐标轴上,从而实现三维探头的轴向对准。基于数学模型的方法,避免机械或者手动对准的随机性和盲目性,极大提高工作效率并保证系统精度;
[0039]
通过对比,对准后的各轴向误差角度小于
±
0.01
°
,满足不大于
±
0.03
°
的系统要求。
[0040]
本发明使大平面测磁系统三维探头对准工作得以实现,并具备可实施性。
附图说明
[0041]
图1为本发明的流程图;
[0042]
图2为本发明中三维坐标旋转矩阵-x轴旋转示意图;
[0043]
图3为本发明中三维坐标旋转矩阵-y轴旋转示意图;
[0044]
图4为本发明中三维坐标旋转矩阵-z轴旋转示意图;
[0045]
图5为本发明中探头阵列对轴实施方式图;
[0046]
图6为本发明中探头阵列对轴前后效果图。
具体实施方式
[0047]
下面结合实施例对本发明做进一步的详细描述,但本发明的保护范围并不限于此。
[0048]
如图1所示,本发明涉及一种大平面测磁系统三维探头对轴方法,所述方法设置基准探头,以基准探头的三个轴向为基准构建基准坐标系,将任一待对轴的探头的三个实际轴向以旋转矩阵方式变换至与基准坐标系对准,得到两个坐标系之间每个轴的旋转角,基于对应每个轴的旋转角,将待对轴的探头的实际轴向磁场值投影至基准坐标系下,得到每个待对轴的探头在基准坐标系下的磁场输出。
[0049]
本发明中,通过建立三维坐标模型,采用不同坐标轴旋转矩阵的方式,将两个三维坐标系联立起来,实现不同探头的对轴工作。
[0050]
建立基准探头的基准坐标系oxyz,任一待对轴的探头的实际坐标系为ox1y1z1;逐次对每个轴旋转,直至实际坐标系ox1y1z1与基准坐标系oxyz重合。
[0051]
如图2所示,令实际坐标系ox1y1z1绕x1轴旋转的角度为a,得到中间过程坐标系ox1'y1'z1',满足
[0052][0053]
如图3所示,令中间过程坐标系ox1'y1'z1'绕y1'轴旋转角度b,得到中间过程坐标系ox2'y2'z2',满足
[0054][0055]
如图4所示,令中间过程坐标系ox2'y2'z2'绕z2'轴旋转角度c,得到与基准坐标系oxyz重合的坐标系ox3y3z3,满足
[0056][0057]
其中,x1、y1、z1为实际分量读数;
[0058]
x1'、y1'、z1'为旋转角度a之后,在坐标系ox1'y1'z1'上的读数;
[0059]
x2'、y2'、z2'为旋转角度b之后,在坐标系ox2'y2'z2'上的读数;
[0060]
x3、y3、z3为旋转角度c之后,在坐标系ox3y3z3上的读数。
[0061]
联立以上方程式,得到实际坐标系ox1y1z1与坐标系ox3y3z3的关系矩阵,由于坐标系ox3y3z3和基准坐标系的三轴一致,故事实上得到实际坐标系ox1y1z1与基准坐标系的关系矩阵,为
[0062][0063]
获取基准探头在初始时刻的三个分量值xj,yj,zj和合成总场值tnorm,得到分量轴与合成总场的夹角aj,bj,cj;
[0064][0065][0066][0067][0068]
获取实际探头初始时刻的三个分量值x1,y1,z1和合成总场t1,
[0069][0070]
基于夹角aj,bj,cj获取实际探头初始时刻的合成总场t1在基准探头坐标系下的分量值x3、y3、z3,
[0071]
x3=t1*cos(aj)
[0072]
y3=t1*cos(bj)
[0073]
z3=t1*cos(cj)
[0074]
通过关系矩阵和x1、y1、z1和x3、y3、z3的值,得到对应x轴、y轴和z轴的旋转角度a、b、c。
[0075]
获取实际探头后续时刻的分量值,基于得到的旋转角度a、b、c,对实际探头后续每个时刻的分量值计算在基准坐标系下的投影值,完成探头对轴计算。
[0076]
每一时刻重复计算每个待对轴的探头在基准坐标系下的投影值。
[0077]
每个待对轴的探头的对轴相互独立。
[0078]
如图5所示为探头阵列对轴实施方式,图中的1部分为探头阵列进行三维坐标旋转之前的实际阵列,阵列内各探头的三个轴向方向随机且相互独立,图中的2为探头阵列进行三维坐标轴旋转之后的对轴阵列,阵列内各探头的三个轴向按分量方向保持一致。
[0079]
如图6所示为探头阵列对轴前后的效果图,左图为对轴前各分量的差值,最大误差达到2000nt,右图为对轴后各分量的差值,最大误差不大于0.1nt,折算到对齐轴向误差为不大于
±
0.01
°
(设分量轴磁场为35000nt,0.1nt变化量对应的角度为0.0002
°
≤
±
0.01
°
)。
[0080]
至此,整个实施方案表述完毕。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1