一种超声波室内三维定位系统及方法与流程
1.本发明属于空间定位技术领域,特别是涉及一种超声波室内三维定位系统及方法。
背景技术:
2.室内定位是指在室内环境中实现位置定位,主要采用无线通讯、基站定位、惯导定位、动作捕捉等多种技术集成形成一套室内位置定位体系,从而实现人员、物体等在室内空间中的位置监控。室内定位技术具有广阔的应用前景,可与移动互联网、云计算、大数据、高性能计算机等技术相结合,形成新的综合应用,在空间基础设施服务、灾害和应急救援、公共安全、医疗健康和养老服务等领域拓宽应用范围,促进技术创新和商业模式创新。
3.目前,常用的室内定位技术包括,wi-fi、蓝牙、红外线、rfid、zigbee和超声波定位等。其中,超声波定位主要采用反射式测距(发射超声波并接收由被测物产生的回波后,根据回波与发射波的时间差计算出两者之间的距离),并通过三角定位等算法确定物体的位置。超声波定位系统由一个主测距器和若干电子标签组成,主测距器放置于空间中待定位处,各电子标签放置于室内空间的固定位置。先由主测距器发送超声波信号给各电子标签,电子标签接收到信号后又反射传输给主测距器,从而可以确定各个电子标签到主测距器之间的距离,并得到定位坐标。超声波定位整体定位精度较高,可达到厘米级。缺点是超声波在传输过程中衰减和干扰从而影响其定位的有效范围,降低定位精度。
技术实现要素:
4.本发明的目的在于提供一种超声波室内三维定位系统,解决超声波定位系统存在的定位范围受到限制,稳定性弱,定位精度易受衰减和干扰影响等技术问题,本发明所述的超声波室内三维定位系统可实现较大范围空间精确三维定位,定位精度达到毫米级。
5.本发明的另一目的还在于基于所述的超声波室内三维定位系统,提供一种室内三维超声波定位的方法。
6.为实现上述目的,本发明采用如下技术方案:
7.一种超声波室内三维定位系统,其特征在于,包括中央控制模块、发射模块和接收模块,其中:
8.所述中央控制模块包含中央控制单元、声速修正模块和无线通讯模块;所述的无线通讯模块向待定位区域发射无线信号,与发射模块和接收模块进行通讯,所述无线信号中包含时钟、声速以及超声换能器坐标信息;所述的中央控制单元包含微控制单元(microcontroller unit;mcu)、时钟源和存储单元,计算和存储包括声速、超声换能器空间坐标等信息,并控制无线通讯;
9.所述的发射模块包括发射控制单元、超声发射模块和无线通讯模块;所述的超声发射模块包括布置在待定位空间的区域定位超声换能器和位置定位超声换能器,所述的区域定位超声换能器由1个或多个不同频率的低频超声换能器组成,所述的位置定位超声换
能器由3个以上不同频率的高频超声换能器组成;所述的发射控制单元包含微控制单元(mcu)、时钟源、存储单元和超声换能器驱动模块,驱动区域定位或位置定位超声换能器向待定位空间发射超声波,所述的无线通讯模块和中央控制模块进行通讯;
10.所述的接收模块包括接收处理单元、无线通讯模块和超声接收模块,所述的超声接收模块为宽带麦克风,接收来自发射模块的超声信号,无线通讯模块接收来自中央控制模块的无线信号;所述接收处理单元包括信号处理模块,mcu和存储单元,执行的数据处理和运算程序包括,通过无线信号确定超声波的发射时间起点,并对接收到的超声信号进行放大、滤波、采集及时频变换处理和取包络线处理,从处理后的时域信号中提取超声波从发射到接收的飞行时间(tof,time of flight),从频域信号中确定参与定位的超声换能器,并由无线信号获取超声换能器的坐标信息,由区域定位超声换能器确定当前所在区域,使用飞行时间和位置定位超声换能器的坐标信息计算出接收模块的位置。
11.所述的声速修正模块包括温、湿度测量单元和压力测量单元,用于测量环境温度、湿度以及大气压,以修正待定位空间的大气声速。
12.所述的区域定位超声换能器可根据待定位空间的大小进行选择,特别地,当待定位空间较小、无需划分区域时可省略区域定位超声换能器;而当待定位空间较大时,可选用多个不同频率的低频超声换能器的组合作为区域定位超声换能器,不同组合的低频超声换能器对应待定位空间中所划定的不同空间区域。在某一划定的空间区域内还可以在不同位置布置2组以上相同的区域定位超声换能器,以确保区域定位信号可完全覆盖该区域。
13.优选地,所述的低频超声换能器的频率范围通常为20khz-50khz,作为区域定位换能器,其传播距离通常大于10米。所述的高频超声换能器的频率范围通常为50k-100khz,作为位置定位换能器,其传播距离通常大于5米。
14.优选地,所述的低频或高频超声换能器采用压电微机超声换能器(piezoelectric micro-machined ultrasonic transducer,pmut)。pmut的指向性通常可以达到180
°
,从而覆盖全部的待定位空间或区域。
15.本发明中在超声接收模块采用全向宽带麦克风,其指向性为180
°
。所述的宽带麦克风其频段范围至少能覆盖所述低频或高频超声换能器的频段范围。优选地,所述的宽带麦克风为2个以上,布置在接收模块不同位置。
16.进一步地,所述的中央控制模块、发射模块和接收模块的无线通讯模块可由无线电广播、wi-fi、zigbee、bluetooth等构成。
17.基于所述的超声波室内三维定位系统,本发明还提供一种室内三维超声波定位的方法,包括:中央控制模块中央控制单元驱动声速修正模块采集并计算声速修正信息,驱动无线通讯模块发射无线信号,其中包含时钟、声速以及超声换能器坐标信息;发射模块在收到来自中央控制模块的包含发射指令的无线信号后,发射控制单元驱动区域定位超声换能器、位置定位超声换能器向待定位空间发射超声波信号;接收模块通过宽带麦克风接收来自发射模块的超声信号,并通过无线通讯模块接收来自中央控制模块的无线信号,无线信号中包含超声波发射的时钟、大气声速以及超声换能器的位置信息;接收处理单元通过无线信号确定超声波发射时间起点,对宽带麦克风接收到的超声信号进行处理,从处理后的时域信号中提取超声波从发射到接收的飞行时间(tof,time of flight),从频域信号中确定参与定位的区域定位超声换能器和位置定位超声换能器,并从无线信号中获取其位置坐
标信息,根据超声波传播tof以及超声换能器的位置坐标,计算出接收模块的位置信息。
18.具体地,所述的室内三维超声波定位的方法,包括如下步骤:
19.(1)中央控制单元驱动声速修正模块采集大气温度、湿度和气压信息,并对声速进行修正,驱动无线通讯模块向待定位空间发射无线信号,与发射模块和接收模块进行通讯,所述无线信号中包含当前待定位空间内的大气声速、驱动超声发射的时钟以及超声换能器的坐标信息;
20.(2)发射模块接收到来自中央控制模块的包含发射指令的无线信号后,发射控制单元驱动区域定位、位置定位超声换能器向待定位空间发射超声波信号;
21.(3)接收模块通过宽带麦克风接收来自发射模块的超声信号,通过无线通讯模块接收来自中央控制模块的无线信号,无线信号中包含超声波发射的同一时钟、大气声速以及超声换能器的位置信息;接收处理单元从接收到的无线信号中读取当前空间中的大气声速、超声波发射的时间起点以及各超声换能器的位置坐标信息并存储,并对宽带麦克风接收到的超声信号进行放大、带通滤波,最后进行采样并存储;
22.(4)接收处理单元通过对超声信号采样得到的数字信号进行离散傅里叶变换,将超声波时域信号变换为频域信号;从频域信号中确定哪些频率的超声换能器参与本次定位,并读取存储单元中所述超声换能器的位置坐标信息,进而由区域定位超声换能器确定当前所在区域;对时域信号通过希尔伯特变换得到该时域信号的包络,通过该时域信号的包络得到参与本次定位的各个位置定位超声换能器发射的超声波从发射到接收的飞行时间tof,从tof时间中选取数值较小(距离接收模块最近)的三个用于求解接收模块的位置;
23.(5)使用超声波传播tof以及位置定位换能器的位置坐标计算接收模块的位置信息,公式如下:
[0024][0025]
式中:接收模块的坐标为(x,y,z),三个位置定位换能器的三维坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3),c为大气声速,t1、t2、t3分别为三个位置定位换能器发射的超声波从发射到接收的飞行时间tof。
[0026]
有益效果:本发明通过采用全向超声换能器作发射的方式,可实现室内空间任意位置的毫米级定位;使用宽带麦克风作接收,可简化超声接收系统以及提高接收机的通用性;同时,本发明采用区域定位换能器和位置定位换能器的组合,可实现较大范围空间精确三维定位;同时本发明可支持无限多个接收模块进行定位。
附图说明
[0027]
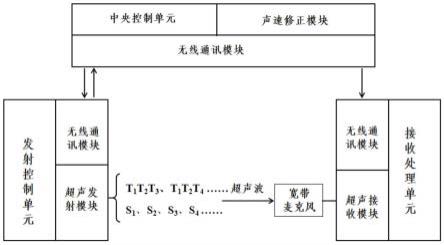
图1为本发明的超声波室内三维定位系统的结构示意图;
[0028]
图2为室内三维超声波定位示意图;
[0029]
图3为接收模块接收到的超声波信号的时域信号示意图;
[0030]
图4为接收模块接收到的超声波信号的频域信号示意图。
具体实施方式
[0031]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例对本发明进行进一步详细说明。应当理解,以下所描述的具体实施例仅用以解释本发明,并不用于限定本发明。本发明的保护范围并不受具体实施方式的限制,则是由权利要求书来确定。
[0032]
如图1所示,一种超声波室内三维定位系统,包括中央控制模块、发射模块和接收模块。其中,中央控制模块包含中央控制单元、声速修正模块以及无线通讯模块;所述的中央控制单元包含微控制单元(microcontroller unit;mcu)、时钟源和存储单元,用于声速修正、超声换能器空间坐标等信息的计算和存储,并控制无线通讯模块实现通讯;所述的声速修正模块主要包含温、湿度测量单元以及压力测量单元,用于测量环境温度、湿度以及大气压,以修正待定位空间大气声速;所述的无线通讯模块发射包含时钟信息、声速信息以及超声换能器坐标信息的无线信号,可由无线电广播、wi-fi、zigbee、bluetooth等构成。
[0033]
所述发射模块包含发射控制单元、无线通讯模块和超声发射模块。所述的超声发射模块由区域定位超声换能器和位置定位超声换能器组成;其中的区域定位超声换能器由1个或不同频率的多个低频超声换能器组成(t1、t2、t3……
),其频率范围通常可以在20khz-50khz范围内选择。区域定位超声换能器的数量可根据待定位空间的大小进行选择,特别是当待定位空间较小时,可省略区域定位超声换能器;而当待定位空间较大时,可选用多个不同频率的低频超声换能器的组合作为区域定位超声换能器;不同组合的低频超声换能器对应待定位空间中所划定的不同空间区域。例如,当选取频率为20khz、21khz、22khz、
……
、50khz的31个低频超声换能器中每3个频率的超声换能器作为一组区域定位超声换能器,便可以对4495(组合数)个独立空间进行定位。
[0034]
所述的位置定位超声换能器由一组不同频率的高频超声换能器组成(s1、s2、s3、s4、s5……
),其频率范围通常可以在50khz-100khz范围内选择。其数量通常为几个到几十个,用于某一区域内具体位置的定位。根据本发明的技术方案,至少3个不在同一直线上的位置定位超声换能器的组合可以确定接收模块在空间中的位置。
[0035]
本发明区分设置区域定位和位置定位超声换能器,并采用两种不同频率的超声波换能器,是由于低频超声波在空气中衰减较慢,其传播有效范围较大,使用低频换能器作为区域定位换能器可确保在其作用区域内的接收模块都可接收到区域定位超声信号;而高频超声波在空气中衰减较快,其作用范围小,但定位精度较低频超声换能器更高。
[0036]
所述的低频或高频超声换能器推荐采用压电微机超声换能器(pmut)。在超声定位领域,目前常规超声换能器其方向角通常较小,定位时存在较大盲区。而pmut的指向性通常可以达到180
°
,从而覆盖全部的待定位空间区域。pmut可根据频率进行选择。一般地,pmut结构包括衬底层、支撑层和结构层,其中支撑层上方的结构层通常由压电层、上电极、下电极构成,支撑层和部分刻蚀后结构层组成振动薄膜,衬底层部分刻蚀后在支撑层下方形成与所述振动薄膜相对应的空腔结构,所述的振动薄膜与其相对应的空腔结构构成一个pmut振元。pmut振元由电路驱动后发射相应频率的超声波。
[0037]
所述的发射控制单元包含微控制单元(microcontroller unit;mcu)、时钟源、存储单元、超声换能器驱动模块等,发射控制单元驱动区域或位置定位超声换能器向待定位空间发射超声波。
[0038]
所述的接收模块包括接收处理单元、无线通讯模块和超声接收模块。作为与超声
发射模块中低频或高频超声换能器对应的超声信号接收器,本发明中在超声接收模块采用全向宽带麦克风,用于接收来自各个方向上不同频率的超声波信号。若使用常规超声换能器作接收单元,由于超声换能器通常具有较小的带宽,要接收较宽频段的超声信号就需要较多的接收换能器,从而增加接收系统的复杂度和制造成本,同时较多的接收超声换能器会降低定位精度。所述的全向宽带麦克风其频段范围至少能覆盖所述低频或高频超声换能器的频段范围,通常为20khz-100khz,全向宽带麦克其指向性通常可达到180
°
。
[0039]
所述接收处理单元包括超声信号放大、滤波、采集和存储的电路、模块或芯片,执行信号或数据处理和运算程序的mcu和存储单元。所述的接收处理单元通过无线信号确定超声换能器的发射时间起点,对超声信号进行放大、滤波、采集及时频变换等处理,从处理后的时域信号中提取超声波从发射到接收的飞行时间(tof,time of flight),从处理后的频域信号中获取区域定位超声换能器和位置定位超声换能器在空间内的坐标信息,使用超声波传播时间信息以及超声换能器的位置坐标信息计算出接收模块的位置信息。
[0040]
与中央控制模块相匹配,所述的发射模块和接收模块中的无线通讯模块可由无线电广播、wi-fi、zigbee、bluetooth等构成。通常,所述的中央控制模块和发射模块间的无线通讯为双向通讯;中央控制模块与接收模块间为单向通讯,即接收模块中的无线通讯模块只用于接收来自中央控制模块的无线信号。
[0041]
采用上述超声波室内三维定位系统,根据本发明的室内三维超声波定位的方法,包括:
[0042]
中央控制单元驱动声速修正模块采集并计算声速修正信息,驱动中央控制模块的无线通讯模块发射无线信号,其中包含时钟、声速以及超声换能器坐标信息;发射控制单元在收到来自中央控制模块的包含发射指令的无线信号后,发射控制单元驱动区域定位超声换能器、位置定位超声换能器向待定位空间发射超声波信号;接收模块通过宽带麦克风接收来自发射模块的超声信号,并通过无线通讯模块接收来自中央控制模块的无线信号,无线信号中包含超声波发射的同一时钟、大气声速以及超声换能器的位置信息,接收处理单元通过无线信号确定超声波发射时间起点,对宽带麦克风接收到的超声信号进行处理,从处理后的时域信号中提取超声波从发射到接收的飞行时间(tof,time of flight),从处理后的频域信号中确定参与本次定位的区域定位超声换能器和位置定位超声换能器,并从无线信号中获取其位置坐标信息,根据超声波传播tof以及超声换能器的位置坐标,计算出接收模块的位置信息。
[0043]
具体地,本发明所述的室内三维超声波定位的方法,包括如下步骤:
[0044]
(1)中央控制单元驱动声速修正模块采集大气温度、湿度和气压等信息,并对声速进行修正,中央控制单元驱动无线通讯模块向定位空间发射无线信号,与发射模块和接收模块进行通讯,所述无线信号中包含当前定位空间内的大气声速信息、超声发射的时钟信息以及超声换能器的位置信息。中央控制模块安装在定位空间内,需保证声速修正模块各传感器可正常工作,同时需保证无线信号不被遮挡。
[0045]
(2)发射模块接收到来自中央控制模块的无线信号中包含的发射指令后,发射控制单元驱动区域定位、位置定位超声换能器向待定位空间发射超声波信号,其中,超声波信号由多个不同频率的全向(180
°
)超声换能器产生。
[0046]
本发明具体实施中,可将发射模块中的发射控制单元和无线通讯模块组装到一
起,将上述组装后的模块和超声换能器安装在待定位空间内,并通过导线将超声换能器与发射模块中的超声驱动端口进行连接,在安装时需保证超声换能器所发射超声不被遮挡,以及超声换能器的布置位置应保证不影响区域外的定位活动,同时超声换能器需确保任意三个位置定位超声换能器不在同一直线上。
[0047]
以空间某一点为坐标原点建立坐标系,通常可选择发射控制单元的安装位置作为坐标原点,确定各超声换能器的坐标位置,最后将安装后的超声换能器区域信息和位置坐标信息记录在中央控制模块中。
[0048]
(3)接收模块通过全向宽带麦克风接收来自发射模块的超声信号,通过无线通讯模块接收来自中央控制模块的无线信号。接收处理单元从接收到的无线信号中读取当前空间中的大气声速、超声波发射的时间起点以及各超声换能器的位置坐标信息并存储。接收处理单元对全向宽带麦克风接收到的超声信号进行放大、带通滤波,最后进行采样并存储。
[0049]
接收模块通常可采用一体式的设计,为增加定位的可靠性,可在一个接收模块中不同位置布置两个以上的全向宽带麦克风作接收单元,从而避免因为遮挡而造成无法接收到超声信号的情况。
[0050]
(4)接收处理单元通过对超声信号采样得到的数字信号进行离散傅里叶变换,将超声波时域信号变换为频域信号,从频域信号中确定哪些频率的超声换能器参与本次定位,进而由区域定位超声换能器确定当前所在区域,并通过查找存储单元中超声换能器的位置坐标信息得到上述超声换能器的空间坐标,对时域信号通过希尔伯特变换得到该时域信号的包络,通过该时域信号的包络,得到参与本次定位的各个位置定位超声换能器发射的超声波从发射到接收飞行时间tof,从tof时间中选取数值较小(距离接收模块最近)的三个用于求解接收模块的位置。
[0051]
(5)使用超声波传播时间信息以及位置定位换能器的位置坐标信息便可计算出接收模块的位置信息。接收模块的位置计算采用以下公式:
[0052][0053]
式中:接收模块的坐标为(x,y,z),三个位置定位换能器的三维坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3),c为大气声速,t1、t2、t3分别为三个位置定位换能器发射的超声波从发射到接收的飞行时间tof。
[0054]
如图2所示,在待定位区域布置一个中央控制模块c,同时,一个较大的空间被多个发射模块z1、z2、z3划分成若干个子空间,每个子空间中有2组区域定位换能器(t1t2t3、t1t2t4、t1t2t5、
……
)以及8个位置定位换能器(s1、s2、s3、
……
s8)。图2所示的接收模块位r于t1t2t3换能器组所标识的区域(z1),接收模块r收到来自换能器t1t2t3、s1、s2、s3、s4的超声信号(图3),通过对接收到的超声波时域信号进行离散傅里叶变换可以得到频域信号(图4)。从频域信号中可以得到由区域定位超声换能器t1、t2、t3发射的三个低频信号f1、f2、f3,以及由位置定位超声换能器s1、s2、s3、s4发射的四个高频信号f
s1
、f
s2
、f
s3
、f
s4
,进而从时域信号中获取到位置定位超声换能器到接收模块的tof信息(tof
s1
、tof
s2
、tof
s3
、tof
s4
、
……
),最后,使用至少三个位置定位超声换能器的坐标信息以及对应的tof信息即可求解出接收器的位
置坐标。
[0055]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和修饰,这些改进和修饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1