一种三维微摩擦力和粘附力的测量装置及其测量方法
1.本发明涉及三维微力测量技术领域,具体为一种三维微摩擦力和粘附力的测量装置及其测量方法。
背景技术:
2.微尺度表面结构特性以及作用机制的相关研究已经是微器件研究领域范围内的一个关键方向,例如微纳生物技术、微机电系统、微纳元件配合领域等等。因此,研究微纳尺度下的表面结构特性、相互作用机制以及微纳条件下力学效果等,对未来微纳器件的发展至关重要。在微纳米领域内,纳米条件下的表面结构力学性能评价是未来微纳米机电系统和微纳米生物技术器件发展所不可避免的,微纳条件下的力学性能评估主要有粘附力和滑动摩擦力,因此需要一种能够对滑动摩擦力和粘附力进行测量的装置和方法。
3.为更好地对微纳器件表面结构及其表面作用力进行三维条件下的测量,不仅需要对常规结构的微纳器件进行表面力学性能测量,还需对深孔等复杂表面进行微力测量。随着微力测量技术的发展,单维的微力测量已经不能满足于越来越复杂的器件表面测量需求,微力测量技术正向着多维方向发展。虽然微力传感器的发展十分迅速,但受到生产条件的限制,现有微力测量设备只局限于测量滑动摩擦力或粘附力中的一种;除此之外,单维滑动摩擦力和粘附力测量装置无法对三维条件下的微力进行有效的测量,如对x、y、z三个方向上的滑动摩擦力或者粘附力进行测量等,因此如何解决对三维条件下的粘附力和滑动摩擦力进行测量是一个迫切需要解决的问题。
技术实现要素:
4.本发明的目的在于:提供一种三维微摩擦力和粘附力的测量装置及其测量方法,以解决以上缺陷。
5.为了实现上述目的,本发明提供如下技术方案:
6.一种三维微摩擦力和粘附力的测量装置,包括减震基座、宏动位移台、支架i、微动位移台、支架ii,所述宏动位移台设置在减震基座上,所述微动位移台安装在宏动位移台上,所述宏动位移台、微动位移台能够在xyz三维方向上分别进行位移的粗调和微调;所述支架i、支架ii分别设置在宏动位移台两侧的减震基座上,所述支架i的内侧设置有固定相机和四象限光电探测器,所述四象限光电探测器设置在固定相机的上方;所述支架ii的内侧设置有悬臂,所述悬臂前端下方设置有探针,所述微动位移台上设置有载物台,所述载物台设置在探针的下方,所述载物台上设置有单轴微力传感器;所述悬臂上方的支架ii内侧设置有激光器,所述激光器发射的激光经悬臂反弹后能够被四象限光电探测器接收。
7.优选地,所述宏动位移台由xy向宏动位移台和z向宏动位移台叠加组成,所述微动位移台由xy向微动位移台和z向微动位移台叠加组成,所述xy向宏动位移台、z向宏动位移台、xy向微动位移台、z向微动位移台均为用于纳米定位的具有压电陶瓷系统的纳米定位器,能够给载物台提供在x方向、y方向、z方向上的位移的调节。
8.优选地,所述固定相机通过可伸缩杆i安装在支架i上,且所述固定相机正对着载物台方向设置;所述四象限光电探测器通过支杆安装在支架i上内侧。
9.优选地,所述激光器通过可伸缩杆ii安装在支架ii上。
10.优选地,所述单轴微力传感器通过固定支架安装在载物台上。
11.优选地,所述探针由测杆以及安装在测杆下端的球形测球组成,所述球形测球的直径大于测杆的直径。
12.优选地,一种三维微摩擦力和粘附力的测量方法,具体包括如下步骤:
13.s1、悬臂x方向的弹性系数标定:
14.将单轴微力传感器通过固定支架固定在载物台上,通过改变单轴微力传感器的固定方向,使其后期能够与探针在x方向上形成接触,从而实现在x方向上的微力进行测量;再通过控制宏动位移台中的xy向宏动位移台在x方向上进行位移的粗调,并通过相机观察探针与单轴微力传感器之间的接触情况,当探针与单轴微力传感器之间充分接近之后,再控制微动位移台中的xy向微动位移台对单轴微力传感器与探针之间的相对位置进行细微调整,并通过微动位移台中的xy向微动位移台控制单轴微力传感器与探针在x方向上进行力学接触行为,并记录计算单轴微力传感器的输出值,以及在单轴微力传感器与探针接触后的xy向微动位移台在x向上的位移;通过计算单轴微力传感器的输出值与xy向微动位移台在x向上的位移的比值,即可得到悬臂在x向的弹性系数k
x
;
15.s2、悬臂y方向的弹性系数标定:
16.原理同s相同,通过改变单轴微力传感器的固定方向,使其后期能够与探针在y方向上形成接触;通过控制xy向宏动位移台在y方向上进行位移的粗调,再控制xy向微动位移台对单轴微力传感器与探针之间的相对位置进行细微调整,记录单轴微力传感器的输出值,以及在单轴微力传感器与探针接触后的xy向微动位移台在y向上的位移;通过计算单轴微力传感器的输出值与xy向微动位移台在y向上的位移的比值,即可得到悬臂在y向的弹性系数ky;
17.s3、悬臂z方向的弹性系数标定:
18.原理同s相同,通过改变单轴微力传感器的固定方向,使其后期能够与探针在z方向上形成接触;通过控制z向宏动位移台在z方向上进行位移的粗调,再控制z向微动位移台对单轴微力传感器与探针之间的相对位置进行细微调整,记录单轴微力传感器的输出值,以及在单轴微力传感器与探针接触后的z向微动位移台在z向上的位移;通过计算单轴微力传感器的输出值与z向微动位移台在z向上的位移的比值,即可得到悬臂在z向的弹性系数kz;
19.s4、被测样品在z方向的摩擦力测量:
20.将单轴微力传感器及固定支架从载物台上去除,再将被测样品置于载物台上;通过宏动位移台对被测样品在x、y轴方向上进行粗调,观察被测样品上设置的微孔位置,当被测样品微孔位置位于探针正下方时,控制宏动位移台对被测样品的z向方向位置进行粗调;当探针的微球进入微孔时,控制微动位移台对被测样品进行x或y向微调直至四象限光电探测器所接收的光路信号发生变化,表明此时探针与被测样品微孔壁发生接触;继续控制微动位移台对被测样品进行x或y向微调,此过程所产生的触发力为摩擦过程中的法向力;停止x或y向的位移,记录微动位移台此时的z向坐标z0,再控制微动位移台使被测样品进行z
向位移,此时四象限光电探测器的输出会产生变化,持续控制微动位移台对被测样品进行z向摩擦过程,直到四象限光电探测器的输出不再变化,记录此时微动位移台的z向坐标z1,此时相对位移量z
1-z0即为z向摩擦过程中在摩擦力的作用下悬臂发生的形变,悬臂相对位移量z
1-z0与悬臂z向弹性系数kz的乘积即为所测z方向的摩擦力大小;
21.s5、被测样品在x或y方向的摩擦力测量:
22.通过宏动位移台对被测样品的x、y向方向的位置进行粗调,使用相机观察被测样品与探针的相互位置,当被测样品位置位于探针正下方时,控制宏动位移台对被测样品在z向位置进行粗调,当探针即将接触被测样品表面时,控制微动位移台对被测样品进行z向上的微调直至四象限光电探测器所接收的光路信号发生变化,表明此时探针与被测样品表面发生接触;继续控制微动位移台对被测样品进行z向微调,此过程所产生的触发力为摩擦过程中的法向力;停止z向的位移,记录微动位移台此时的x或y向坐标x0或y0,再控制微动位移台使被测样品进行x或y向位移,此时四象限光电探测器的输出会产生变化,持续控制微动位移台对被测样品进行x或y向摩擦过程,直到四象限光电探测器的输出不再变化,记录此时微动位移台的x或y向坐标为x1或y1,此时x或y向的相对位移量x
1-x0或y
1-y0,即为x或y向摩擦过程中在摩擦力的作用下悬臂发生的形变,悬臂形变量x
1-x0或y
1-y0与悬臂在x或y向对应的弹性系数k
x
或ky的乘积,即为所测x或y方向上的摩擦力大小;
23.s6、被测样品在z方向的粘附力测量:
24.首先记录四象限光电探测器的输出值v0,再通过宏动位移台对被测样品的x、y向位置进行粗调,使用相机观察被测样品与探针相互位置,当被测样品位置位于探针正下方时,控制宏动位移台对被测样品的z向位置进行粗调,当探针即将接触被测样品表面时,控制微动位移台对被测样品进行z向微调直至四象限光电探测器所接收的光路信号发生变化,表明此时探针与被测样品表面发生接触;继续控制微动位移台对被测样品进行z向的微调,此过程所产生的触发力为黏附过程中施加的载荷;停止z向的位移,再控制微动位移台使被测样品沿z反方向运动,当四象限光电探测器的输出值重新变为v0时,记录此时微动位移台的z向坐标z0;继续持续控制微动位移台沿z反方向运动,由于黏附力的作用会导致四象限光电探测器的输出产生变化,当四象限光电探测器的输出值达到最大时,记录此时微动位移台的z向坐标z1,此时相对位移量z
1-z0即为z向粘附过程中在粘附力的作用下悬臂发生的形变大小;悬臂形变量z
1-z0与悬臂的z向弹性系数kz的乘积即为所测z方向粘附力的大小;
25.s7、被测样品在x或y方向的粘附力测量:
26.首先记录四象限光电探测器的输出v0,再通过宏动位移台对被测样品的x、y轴位置进行粗调,使用相机观察被测样品的微孔位置,当被测样品微孔位置位于探针正下方时,控制宏动位移台对被测样品的z向位置进行粗调;当探针的微球进入被测样品的微孔时,控制微动位移台对被测样品进行x或y向上的微调直至四象限光电探测器所接收的光路信号发生变化,表明此时探针与被测样品微孔壁发生接触;继续控制微动位移台对被测样品进行x或y向的微调,该过程所产生的触发力为粘附过程中施加的载荷;停止x或y向的位移,再控制微动位移台使被测样品沿x或y反方向运动,当四象限光电探测器的输出值重新变为v0时,记录此时微动位移台的x或y向对应坐标为x0或y0;继续持续控制微动位移台沿x或y反方向运动,由于黏附力的作用会导致四象限光电探测器的输出产生变化,当四象限光电探测
器的输出值达到最大时,记录此时微动位移台的x或y向对应的坐标为x1或y1,此时相对位移量x
1-x0或y
1-y0即为x或y向粘附过程中在粘附力的作用下悬臂发生的形变大小;悬臂形变量x
1-x0或y
1-y0与悬臂的x或y向弹性系数k
xky
的乘积即为所测x或y方向粘附力的大小。
27.本发明的有益效果在于:
28.(1)本发明的一种三维微摩擦力和粘附力的测量装置及其测量方法,通过固定支架对单轴微力传感器进行不同方向的固定,并利用三维位移台控制单轴微力传感器对悬臂探针进行x、y、z三个方向上的弹性系数标定,使得只具备单轴测量的微力传感器通过标定进而可对三维方向的微力进行测量,从而使得悬臂探针具备在三维方向上测量微摩擦力或者粘附力的功能,测量快捷高效。
29.(2)本发明提供了一种三维微摩擦力和粘附力的测量装置及其测量方法,探针本身是具备一定长度的测杆,可通过测杆深入微孔等复杂形貌对深孔底部和侧壁进行三维粘附力和摩擦力测量,测杆的尖端部分为球形测头,该球形测头的直径要大于测杆直径,该设计可以使得探针在进行侧壁测量时,可以避免测杆触碰侧壁导致的测量误差,解决了传统针尖式摩擦力测量装置或粘附力测量装置无法对深孔等复杂表面进行三维滑动摩擦力和粘附力测量的技术瓶颈。
30.(3)本发明提供了一种三维微摩擦力和粘附力的测量装置及其测量方法,在保证悬臂的高分辨率的同时,利用四象限光电探测器对悬臂的形变进行检测,使得悬臂在具备高分辨率的同时也具有高灵敏度,解决了传统应变式传感器由于机械特性所导致的迟滞对测量灵敏度所带来的误差影响。
附图说明
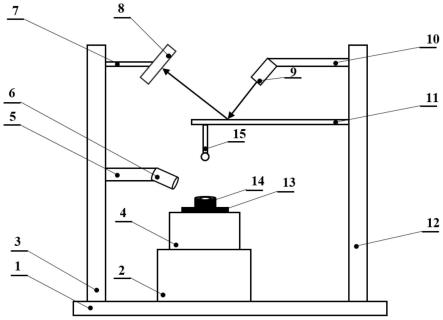
31.图1:本发明的三维微摩擦力和粘附力的测量装置的结构示意图;
32.图2:本发明的悬臂在x向上的弹性系数标定示意图;
33.图3:本发明的悬臂在y向上的弹性系数标定示意图;
34.图4:本发明的悬臂在z向上的弹性系数标定示意图;
35.图5:本发明的三维微摩擦力和粘附力的测量装置在对z向滑动摩擦力测量示意图;
36.图6:本发明的三维微摩擦力和粘附力的测量装置在对x(y)向滑动摩擦力测量示意图;
37.图7:本发明的三维微摩擦力和粘附力的测量装置在对z向粘附力测量示意图;
38.图8:本发明的三维微摩擦力和粘附力的测量装置在对x(y)向粘附力测量示意图。
具体实施方式
39.结合附图1-8,对本发明的具体实施方式作如下说明:
40.如图1所示,一种三维微摩擦力和粘附力的测量装置,包括减震基座1、宏动位移台2、支架i3、微动位移台4、支架ii12,宏动位移台2设置在减震基座1上,微动位移台4安装在宏动位移台2上,宏动位移台2、微动位移台4能够在x、y、z三维方向上分别进行位移的粗调和微调。其中宏动位移台2由xy向宏动位移台和z向宏动位移台叠加组成,微动位移台4由xy向微动位移台和z向微动位移台叠加组成,xy向宏动位移台、z向宏动位移台、xy向微动位移
台、z向微动位移台均为用于纳米定位的具有压电陶瓷系统的纳米定位器,能够给载物台13提供在x方向、y方向、z方向上的位移的调节。
41.支架i3、支架ii12分别设置在宏动位移台2两侧的减震基座1上,支架i3的内侧设置有固定相机6和四象限光电探测器8,四象限光电探测器8设置在固定相机6的上方。其中,固定相机6通过可伸缩杆i5安装在支架i3上,且固定相机6正对着载物台13方向设置;四象限光电探测器8通过支杆7安装在支架i3上内侧。
42.支架ii12的内侧设置有悬臂11,悬臂11前端下方设置有探针15,探针15由测杆以及安装在测杆下端的球形测球组成,球形测球的直径大于测杆的直径。
43.微动位移台4上设置有载物台13,载物台13设置在探针15的下方,载物台13上设置有单轴微力传感器17,单轴微力传感器17通过固定支架16安装在载物台13上。
44.悬臂11上方的支架ii12内侧设置有激光器9,激光器9通过可伸缩杆ii10安装在支架ii12上,激光器9发射的激光经悬臂11反弹后能够被四象限光电探测器8接收。
45.在三维微力测量过程中,先控制微动位移台4和微动位移台4对通过固定支架16固定在载物台13上的单轴微力传感器17对悬臂11进行三维方向的弹性系数标定,悬臂11弹性系数标定过程结束之后,控制宏动位移台2对被测样品14进行x、y、z三个方向上的粗调,并通过相机6观察探针15与被测样品14之间的接触情况,当探针15与被测样品14之间充分接近之后,再控制微动位移台4对被测样品14与探针15之间的相对位置进行细微调整,并通过微动位移台4控制被测样品14与探针15进行力学接触行为,通过四象限光电探测器8检测激光光路变化进行悬臂11触发检测,同时通过微动位移台4记录力学接触过程的位移变化,此时位移变化大小与悬臂11在该位移方向上的弹性系数的乘积即为所测类型微力的数值。
46.一种三维微摩擦力和粘附力的测量方法,具体包括如下步骤:
47.s1、悬臂x方向的弹性系数标定:
48.图2为本发明的悬臂在x向上的弹性系数标定示意图。如图2所示,将单轴微力传感器17通过固定支架16固定在载物台13上,通过改变单轴微力传感器17的固定方向,使其后期能够与探针15在x方向上形成接触,从而实现在x方向的微力进行测量;再通过控制宏动位移台2中的xy向宏动位移台在x方向上进行位移的粗调,并通过相机6观察探针15与单轴微力传感器17之间的接触情况,当探针15与单轴微力传感器17之间充分接近之后,再控制微动位移台4中的xy向微动位移台对单轴微力传感器17与探针15之间的相对位置进行细微调整,并通过微动位移台4中的xy向微动位移台控制单轴微力传感器17与探针15在x方向上进行力学接触行为,并记录计算单轴微力传感器17的输出值,以及在单轴微力传感器17与探针15接触后的xy向微动位移台在x向的位移;通过计算单轴微力传感器17的输出值与xy向微动位移台在x向的位移的比值,即可得到悬臂11在x向的弹性系数k
x
。
49.s2、悬臂y方向的弹性系数标定:
50.图3为本发明的悬臂在y向的弹性系数标定示意图。如图3所示,原理同s1相同,通过改变单轴微力传感器17的固定方向,使其后期能够与探针15在y方向上形成接触;通过控制xy向宏动位移台在y方向上进行位移的粗调,再控制xy向微动位移台对单轴微力传感器17与探针15之间的相对位置进行细微调整,记录单轴微力传感器17的输出值,以及在单轴微力传感器17与探针15接触后的xy向微动位移台在y向的位移;通过计算单轴微力传感器17的输出值与xy向微动位移台在y向的位移的比值,即可得到悬臂11在y向的弹性系数ky。
51.s3、悬臂z方向的弹性系数标定:
52.图4为本发明的悬臂在z向的弹性系数标定示意图。如图4所示,原理同s1相同,通过改变单轴微力传感器17的固定方向,使其后期能够与探针15在z方向上形成接触;通过控制z向宏动位移台在z方向上进行位移的粗调,再控制z向微动位移台对单轴微力传感器17与探针15之间的相对位置进行细微调整,记录单轴微力传感器17的输出值,以及在单轴微力传感器17与探针15接触后的z向微动位移台在z向的位移;通过计算单轴微力传感器17的输出值与z向微动位移台在z向的位移的比值,即可得到悬臂11在z向的弹性系数kz。
53.s4、被测样品在z方向的摩擦力测量:
54.图5为本发明的三维微摩擦力和粘附力的测量装置在对z向滑动摩擦力测量过程中的示意图。如图5所示,将单轴微力传感器17及固定支架16从载物台13上去除,再将被测样品14置于载物台13上;通过宏动位移台2对被测样品14在x、y轴方向上进行粗调,观察被测样品14上设置的微孔位置,当被测样品14微孔位置位于探针15正下方时,控制宏动位移台2对被测样品14的z向方向上位置进行粗调;当探针15的微球进入微孔时,控制微动位移台4对被测样品14进行x或y向的微调直至四象限光电探测器8所接收的光路信号发生变化,表明此时探针15与被测样品14微孔壁发生接触;继续控制微动位移台4对被测样品14进行x或y向的微调,该过程所产生的触发力为摩擦过程中的法向力;停止x或y向的位移,记录微动位移台4此时的z向的坐标z0,再控制微动位移台4使被测样品14进行z向位移,此时四象限光电探测器8的输出会产生变化,持续控制微动位移台4对被测样品14进行z向摩擦过程,直到四象限光电探测器8的输出不再变化,记录此时微动位移台4的z向坐标z1,此时相对位移量z1-z0即为z向摩擦过程中在摩擦力的作用下悬臂11发生的形变,悬臂11相对位移量z1-z0与悬臂11z向的弹性系数kz的乘积即为所测z方向的摩擦力大小。
55.s5、被测样品在x(y)方向的摩擦力测量:
56.图6为本发明的三维微摩擦力和粘附力的测量装置在对x(y)向滑动摩擦力测量过程中的示意图。如图6所示,通过宏动位移台2对被测样品14的x、y向方向的位置进行粗调,使用相机6观察被测样品14与探针15的相互位置,当被测样品14位置位于探针15正下方时,控制宏动位移台2对被测样品14在z向方向的位置进行粗调,当探针15即将接触被测样品14表面时,控制微动位移台4对被测样品14进行z向的微调直至四象限光电探测器8所接收的光路信号发生变化,表明此时探针15与被测样品14表面发生接触;继续控制微动位移台4对被测样品14进行z向微调,该过程所产生的触发力为摩擦过程中的法向力;停止z向微调,记录微动位移台4此时的x(y)向的坐标x0(y0),再控制微动位移台4使被测样品14进行x(y)向位移,此时四象限光电探测器8的输出会产生变化,持续控制微动位移台4对被测样品14进行x(y)向摩擦过程,直到四象限光电探测器8的输出不再变化,记录此时微动位移台4的x(y)向的坐标x1(y1),此时x(y)向的相对位移量x
1-x0(y
1-y0),即为x(y)向摩擦过程中在摩擦力的作用下悬臂11发生的形变,悬臂11形变量x
1-x0(y
1-y0)与悬臂11在x(y)向的对应的弹性系数k
x
(ky)的乘积,即为所测x(y)方向的摩擦力大小。
57.s6、被测样品在z方向的粘附力测量:
58.图7为本发明的三维微摩擦力和粘附力的测量装置对z向粘附力的测量示意图。如图7所示,首先记录四象限光电探测器8的输出值v0,再通过宏动位移台2对被测样品14的x、y向位置进行粗调,使用相机6观察被测样品14与探针15相互位置,当被测样品14位置位于
探针15正下方时,控制宏动位移台2对被测样品14的z向位置进行粗调,当探针15即将接触被测样品14表面时,控制微动位移台4对被测样品14进行z向微调直至四象限光电探测器8所接收的光路信号发生变化,表明此时探针15与被测样品14表面发生接触,继续控制微动位移台4对被测样品14进行z向微调,该过程所产生的接触力为黏附过程中施加的载荷;再控制微动位移台4使被测样品14沿z反方向运动,当四象限光电探测器8的输出值重新变为v0时,记录此时微动位移台4的z向坐标z0;继续控制微动位移台4沿z反方向运动,由于黏附力的作用会导致四象限光电探测器8的输出产生变化,持续控制微动位移台4沿z反方向运动,当四象限光电探测器8的输出最大时,记录此时微动位移台4的z向坐标z1,此时相对位移量z
1-z0即为z向粘附过程中在粘附力的作用下的悬臂11发生的形变大小;悬臂11形变量z
1-z0与悬臂11的z向弹性系数kz的乘积即为所测z方向粘附力大小。
59.s7、被测样品在x(y)方向的粘附力测量:
60.图8为本发明的三维微摩擦力和粘附力的测量装置在对x(y)向粘附力测量过程中的示意图。如图8所示,首先记录四象限光电探测器8的输出v0,再通过宏动位移台2对被测样品14的x、y轴位置进行粗调,使用相机6观察被测样品14的微孔位置,当被测样品14微孔位置位于探针15正下方时,控制宏动位移台2对被测样品14的z向位置进行粗调;当探针15的微球进入被测样品14的微孔时,控制微动位移台4进行x(y)向的微调直至四象限光电探测器8所接收的光路信号发生变化,表明此时探针15与被测样品14微孔壁发生接触;继续控制微动位移台4对被测样品14进行x(y)向的微调,该过程所产生的触发力为粘附过程中施加的载荷;停止x(y)向的位移,再控制微动位移台4使被测样品14沿x(y)反方向运动,当四象限光电探测器8的输出值重新变为v0时,记录此时微动位移台4的x(y)向坐标x0(y0);继续持续控制微动位移台4沿x(y)反方向运动,由于黏附力的作用会导致四象限光电探测器8的输出产生变化,当四象限光电探测器8的输出值达到最大时,记录此时微动位移台4的x(y)向坐标x1(y1),此时相对位移量x
1-x0(y
1-y0)即为x(y)向粘附过程中在粘附力的作用下悬臂11发生的形变大小;悬臂11形变量x
1-x0(y
1-y0)与悬臂11的x(y)向弹性系数k
x
(ky)的乘积即为所测x(y)方向粘附力的大小。
61.本发明的一种三维微摩擦力和粘附力的测量装置及其测量方法的工作原理是:
62.如图2、图3、图4所示,单轴微力传感器17具备单方向微力测量功能,通过固定支架16将单轴微力传感器17固定在载物台13上,调整单轴微力传感器17的固定方向,对悬臂11进行x、y、z三个方向弹性系数标定,当悬臂11在探针15受力作用下形变时,通过计算悬臂11在该方向的形变大小和该方向上弹性系数的乘积来实现三维方向的微力测量。
63.如图1所示,当悬臂11未受到测量力时,四象限光电探测器8所检测到的由激光器发出并通过悬臂11反射到四象限光电探测器8的激光光路并未发生变化,四象限光电探测器8输出值不变,当悬臂11在摩擦力或粘附力的作用下产生形变时,此时四象限光电探测器8所检测到的激光光路产生变化,四象限光电探测器8输出值发生改变,通过四象限光电探测器8输出的改变可以检测探针15的触发情况,利用四象限光电探测器8检测激光光路变化来检测探针15的触发具有更好的实时性,减少了由于机械特性所导致的迟滞效应对测量灵敏度的影响。
64.如图5所示,探针15本身是具有一定长度的测杆,在探针15的尖端具有一个球形的测头,球形测头和测杆的组合,不仅可以对具有一定深度的深孔等复杂表面进行力学测量,
还可以利用测球测头凸出测杆的部分对深孔侧壁进行微力测量。将探针15设计为测球和测杆的组合可以使得探针15灵活应用在不同的复杂表面上的三维微力测量行为,需要考虑测杆的长度,测杆本身的长度不宜过长,防止测杆刚性减小导致在测力过程中测杆处发生弯曲,测杆刚度越大,微力传递效果越好。
65.上述是对发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的这种非实质改进,或未经改进将发明的构思和技术方案直接应用于其他场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1