用于水电站叠梁门操作门机抓梁定位的智能化检测系统及其使用方法
1.本发明属于自动检测技术领域,更具体地涉及用于水电站叠梁门操作门机抓梁定位的智能化检测系统及其使用方法的设计与制备。
背景技术:
2.水电站进水口分层取水结构已成为水电生态友好实践的重要组成部分,由于投资相对较小,对库水位变化适应性强,运行操作灵活,叠梁门分层取水广泛应用于大型电站进口设计。现有技术中,水电站进水口分层取水主要是采用门式起重机起吊叠梁门的方式实现的。
3.目前,水电站门机大多采用液压抓梁,当抓梁没入水中后,如何确保在水下时抓梁与闸门稳定及准确的连接与脱开,关系着闸门能否正常完成起落,是整个吊装工作的关键。抓梁在水下10多米至100多米的环境下工作,工况复杂,各种不确定因素例如碎枝、腐叶以及一些生活垃圾可能堵塞销孔,这让水下启闭闸门处于一种不能完全受控的状态,这使得水电站的生态调水工作的困难大大增加。
技术实现要素:
4.本发明目的是提供了用于水电站叠梁门操作门机抓梁定位的智能化检测系统及其使用方法,通过此检测系统能够实时监测抓梁与叠梁门结合状态,进而为司机准确操控叠梁门提供依据,为未来进一步提高抓梁智能化抓取叠梁门的准确性提供数据支撑。
5.为了实现上述技术效果,本发明提供用于水电站叠梁门操作门机抓梁定位的智能化检测系统,包括数据采集子系统和故障诊断子系统;所述数据采集子系统由工控板、压力传感器组件、磁环传感器组件和永磁铁组件构成;所述压力传感器组件、磁环传感器组件和永磁铁组件分别对应搭载于抓梁和叠梁门上,用于采集抓梁与叠梁门之间的定位和穿销过程相关数据,并将采集到的相关数据传输到工控板;所述故障诊断子系统由硬件模块和诊断模块构成;所述硬件模块采用工控机,工控机与数据采集子系统的工控板相连,并用于接收数据采集子系统所采集到的相关数据;所述诊断模块由网络层和应用层两部分组成;所述网络层用于接收硬件模块获取的相关数据,对相关数据进行处理,并将识别后的相关数据发送到应用层;所述应用层是将处理后的相关数据进行逻辑判断是否发出报警信号。
6.所述压力传感器组件包括左侧压力传感器和右侧压力传感器;所述左侧压力传感器安装在抓梁的左侧液压缸内部,并用于监测左侧液压缸内部的压力信号来判定左侧穿销是否发生卡阻;所述右侧压力传感器安装在抓梁的右侧液压缸内部,并用于监测右侧液压缸内部的压力信号来判定右侧穿销是否发生卡阻。
7.所述磁环传感器组件包括安装在左侧定位销上的左侧定位销1号磁环传感器和左侧定位销2号磁环传感器;包括安装在右侧定位销上的右侧定位销1号磁环传感器和右侧定位销2号磁环传感器;包括安装在左侧穿销上的左侧1号磁环传感器和左侧2号磁环传感器;包括安装在右侧穿销上的右侧1号磁环传感器和右侧2号磁环传感器。
8.所述永磁铁组件包括安装在叠梁门的左侧定位销孔上的左侧2号永磁铁,左侧2号永磁铁与磁环传感器组件的左侧定位销1号磁环传感器和左侧定位销2号磁环传感器相配合,并判断左侧定位销的位置;包括安装在叠梁门的右侧定位销孔上的右侧2号永磁铁,右侧2号永磁铁与磁环传感器组件的右侧定位销1号磁环传感器和右侧定位销2号磁环传感器相配合,并判断右侧定位销的位置;包括安装在叠梁门的左侧穿销孔上的左侧1号永磁铁,左侧1号永磁铁与磁环传感器组件的左侧1号磁环传感器和左侧2号磁环传感器相配合,并判断左侧穿销的位置;包括安装在叠梁门的右侧穿销孔上的右侧1号永磁铁,右侧1号永磁铁与磁环传感器组件的右侧1号磁环传感器和右侧2号磁环传感器相配合,并判断右侧穿销的位置。
9.用于水电站叠梁门操作门机抓梁定位的智能化检测系统的判定方法:在开始启动智能化检测系统后,叠梁门开始定位,抓梁的运行高度h是一定的,下落的速度v是一定的,在h/v的时间内,没有得到右侧定位销2号磁环传感器和左侧定位销2号磁环传感器上的信号时,则表示叠梁门定位失败,需要重新定位,若是在规定的时间内右侧定位销2号磁环传感器和左侧定位销2号磁环传感器上有信号,则表明叠梁门定位成功;穿销开始工作后,在穿销完成工作的工作时间内,左侧1号磁环传感器、左侧2号磁环传感器、右侧1号磁环传感器和右侧2号磁环传感器无信号,而且左侧定位销1号磁环传感器和左侧定位销2号磁环传感器数值增大,则表明有异物卡住穿销或者穿销孔被堵塞,系统发出警报,工作人员下水清理穿销孔,之后穿销重新工作;若是左侧定位销1号磁环传感器和左侧定位销2号磁环传感器数值正常但无穿销信号,则说明左侧1号永磁铁和右侧1号永磁铁可能脱落,需要人员下水检修永磁铁;当穿销信号正常且压力传感器数值也正常时,则表明已完成穿销工作,系统运行结束。
10.左侧定位销1号磁环传感器和左侧定位销2号磁环传感器分别用于判断左侧定位销是否进入定位销孔和是否到达指定位置;右侧定位销1号磁环传感器和右侧定位销2号磁环传感器分别用于判断右侧定位销是否进入定位销孔和是否到达指定位置;左侧1号磁环传感器和左侧2号磁环传感器分别用于判断左侧穿销是否进入穿销孔和是否到达指定位置;右侧1号磁环传感器和右侧2号磁环传感器分别用于判断右侧穿销是否进入穿销孔和是否到达指定位置。
11.所述用于水电站叠梁门操作门机抓梁定位的智能化检测系统的使用方法,包括以下步骤:步骤1:在每个定位销会安装两个磁环,分别为左侧定位销1号磁环传感器、左侧定位销2号磁环传感器、右侧定位销1号磁环传感器和右侧定位销2号磁环传感器;左侧定位销
1号磁环传感器和右侧定位销1号磁环传感器安装在定位销主干的最底端,用于判断定位销是否进入叠梁门的销孔;左侧定位销2号磁环传感器和右侧定位销2号磁环传感器的安装位置是抓梁的定位销与叠梁门的销孔对齐时定位销所在的位置;步骤2:右侧穿销处需要在液压缸处安装右侧压力传感器,右侧1号磁环传感器、右侧2号磁环传感器和右侧1号永磁铁;左侧穿销处需要在液压缸处安装左侧压力传感器,左侧1号磁环传感器、左侧2号磁环传感器和左侧1号永磁铁;右侧1号永磁铁和左侧1号永磁铁对应安装在抓梁的穿销孔的出口处,由于永磁铁不能承受力,所以永磁铁的直径应大于叠梁门的销孔,右侧压力传感器和左侧压力传感器安装在液压缸的内部,所需要的信号和电源与液压缸的电源共同使用,工作时贴在穿销表面的磁环传感器与压力传感器实现共同通信;步骤3:所有的传感器作为信息收集模块,工控机作为信息处理模块,工控机的安装位置在门式起重机的控制区域,用于实时反馈抓梁的工作状态;步骤4:叠梁门的内部是空心的,工控板安装在叠梁门的内部;步骤5:在门式起重机开始工作后,将门式起重机上的所有磁环传感器接通电源,抓梁开始运行;首先进行叠梁门定位,当定位销上的左侧定位销1号磁环传感器和右侧定位销1号磁环传感器对应通过固定在叠梁门上的左侧2号永磁铁和右侧2号永磁铁时,永磁铁磁场和磁环传感器上的磁场相交,会在磁铁检测装置上返回一个应变脉冲,此时磁环传感器将磁场信号转换为电信号,由连接线上传至工控板,工控板将信号处理后上传至工控机,当工控机接收到这个信号时,工控机根据系统判定方法中的逻辑对信号进行判断,当左侧定位销1号磁环传感器和右侧定位销1号磁环传感器同时获取信号后,抓梁继续工作,向下运动,在左侧2号永磁铁和右侧2号永磁铁的磁场和左侧定位销2号磁环传感器和右侧定位销2号磁环传感器上的磁场相交之后,磁环传感器将会第二次传回电信号,当工控板将此信号上传至工控机后,工控机发出指令,使定位销停止工作;穿销开始工作,穿销液压缸处的压力传感器和穿销外壁的磁环传感器开始获取穿销的信号,连接线路将获取的信号上传至工控机处,然后根据系统判定方法对信号进行判断,当压力传感器和磁环传感器的数据信号正常时,表明穿销已准确进入销孔,系统工作完毕,抓梁吊起叠梁门。
12.总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:1、通过此检测系统能够实时监测抓梁与叠梁门结合状态,进而为司机准确操控叠梁门提供依据,为未来进一步提高抓梁智能化抓取叠梁门的准确性提供数据支撑。
13.2、通过采用上述的压力传感器组件能够用于检测穿销是否发生卡阻,若是压力传感器数值正常但穿销信号无,则说明永磁铁可能脱落,需要人员下水检修永磁铁。当穿销信号正常且压力传感器数值也正常时,则表明已完成传销工作,系统运行结束。
14.3、通过上述的磁环传感器组件,能够用于检测相应的定位销和穿销在对应销孔中的位置。
15.4、通过上述的永磁铁组件能够配合相应的磁环传感器进而判定相应的销轴位置。
附图说明
16.下面结合附图和实施例对本发明作进一步说明。
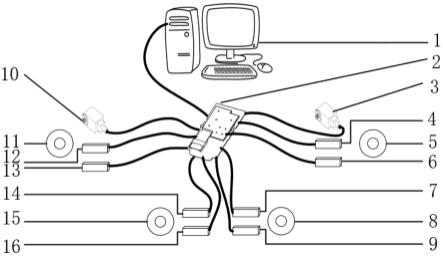
17.图1是本发明智能化检测系统图。
18.图2是本发明系统的判断方法流程图。
19.图3是本发明穿销与定位销数据采集装置的安装示意图。
20.图4是本发明图3中a局部视图。
21.图中:1.工控机,2.工控板,3.右侧压力传感器,4.右侧1号磁环传感器,5.右侧1号永磁铁,6.右侧2号磁环传感器,7.右侧定位销2号磁环传感器,8. 右侧2号永磁铁,9.右侧定位销1号磁环传感器,10.左侧压力传感器,11.左侧1号永磁铁,12.左侧1号磁环传感器,13.左侧2号磁环传感器,14.左侧定位销2号磁环传感器,15.左侧2号永磁铁,16.左侧定位销1号磁环传感器,17.抓梁,18. 右侧定位销,19.叠梁门,20. 左侧液压缸,21. 左侧穿销。
具体实施方式
22.下面结合附图对本发明的实施方式做进一步的说明。
23.实施例1:参见图1-4,用于水电站叠梁门操作门机抓梁定位的智能化检测系统,包括数据采集子系统和故障诊断子系统;所述数据采集子系统由工控板2、压力传感器组件、磁环传感器组件和永磁铁组件构成;所述压力传感器组件、磁环传感器组件和永磁铁组件分别对应搭载于抓梁17和叠梁门19上,用于采集抓梁17与叠梁门19之间的定位和穿销过程相关数据,并将采集到的相关数据传输到工控板2;所述故障诊断子系统由硬件模块和诊断模块构成;所述硬件模块采用工控机1,工控机1与数据采集子系统的工控板2相连,并用于接收数据采集子系统所采集到的相关数据;所述诊断模块由网络层和应用层两部分组成;所述网络层用于接收硬件模块获取的相关数据,对相关数据进行处理,并将识别后的相关数据发送到应用层;所述应用层是将处理后的相关数据进行逻辑判断是否发出报警信号。通过此检测系统能够实时监测抓梁与叠梁门结合状态,进而为司机准确操控叠梁门提供依据,为未来进一步提高抓梁智能化抓取叠梁门的准确性提供数据支撑。
24.进一步的,所述压力传感器组件包括左侧压力传感器10和右侧压力传感器3;所述左侧压力传感器10安装在抓梁17的左侧液压缸20内部,并用于监测左侧液压缸20内部的压力信号来判定左侧穿销是否发生卡阻;所述右侧压力传感器3安装在抓梁17的右侧液压缸内部,并用于监测右侧液压缸内部的压力信号来判定右侧穿销是否发生卡阻。通过采用上述的压力传感器组件能够用于检测穿销是否发生卡阻,若是压力传感器数值正常但穿销信号无,则说明永磁铁可能脱落,需要人员下水检修永磁铁。当穿销信号正常且压力传感器数值也正常时,则表明已完成传销工作,系统运行结束。
25.进一步的,所述磁环传感器组件包括安装在左侧定位销上的左侧定位销1号磁环传感器16和左侧定位销2号磁环传感器14;包括安装在右侧定位销18上的右侧定位销1号磁环传感器9和右侧定位销2号磁环传感器7;包括安装在左侧穿销21上的左侧1号磁环传感器12和左侧2号磁环传感器13;包括安装在右侧穿销上的右侧1号磁环传感器4和右侧2号磁环传感器6。通过上述的磁环传感器组件,能够用于检测相应的定位销和穿销在对应销孔中的位置。
26.进一步的,所述永磁铁组件包括安装在叠梁门的左侧定位销孔上的左侧2号永磁铁15,左侧2号永磁铁15与磁环传感器组件的左侧定位销1号磁环传感器16和左侧定位销2
号磁环传感器14相配合,并判断左侧定位销的位置;包括安装在叠梁门的右侧定位销孔上的右侧2号永磁铁8,右侧2号永磁铁8与磁环传感器组件的右侧定位销1号磁环传感器9和右侧定位销2号磁环传感器7相配合,并判断右侧定位销18的位置;包括安装在叠梁门的左侧穿销孔上的左侧1号永磁铁11,左侧1号永磁铁11与磁环传感器组件的左侧1号磁环传感器12和左侧2号磁环传感器13相配合,并判断左侧穿销21的位置;包括安装在叠梁门的右侧穿销孔上的右侧1号永磁铁5,右侧1号永磁铁5与磁环传感器组件的右侧1号磁环传感器4和右侧2号磁环传感器6相配合,并判断右侧穿销的位置。通过上述的永磁铁组件能够配合相应的磁环传感器进而判定相应的销轴位置。
27.实施例2:用于水电站叠梁门操作门机抓梁定位的智能化检测系统的判定方法:在开始启动智能化检测系统后,叠梁门开始定位,抓梁的运行高度h是一定的,下落的速度v是一定的,在h/v的时间内,没有得到右侧定位销2号磁环传感器7和左侧定位销2号磁环传感器14上的信号时,则表示叠梁门定位失败,需要重新定位,若是在规定的时间内右侧定位销2号磁环传感器7和左侧定位销2号磁环传感器14上有信号,则表明叠梁门定位成功;穿销开始工作后,在穿销完成工作的工作时间内,左侧1号磁环传感器12、左侧2号磁环传感器13、右侧1号磁环传感器4和右侧2号磁环传感器6无信号,而且左侧定位销1号磁环传感器16和左侧定位销2号磁环传感器14数值增大,则表明有异物卡住穿销或者穿销孔被堵塞,系统发出警报,工作人员下水清理穿销孔,之后穿销重新工作;若是左侧定位销1号磁环传感器16和左侧定位销2号磁环传感器14数值正常但无穿销信号,则说明左侧1号永磁铁11和右侧1号永磁铁5可能脱落,需要人员下水检修永磁铁;当穿销信号正常且压力传感器数值也正常时,则表明已完成穿销工作,系统运行结束。
28.左侧定位销1号磁环传感器16和左侧定位销2号磁环传感器14分别用于判断左侧定位销是否进入定位销孔和是否到达指定位置;右侧定位销1号磁环传感器9和右侧定位销2号磁环传感器7分别用于判断右侧定位销是否进入定位销孔和是否到达指定位置;左侧1号磁环传感器12和左侧2号磁环传感器13分别用于判断左侧穿销21是否进入穿销孔和是否到达指定位置;右侧1号磁环传感器4和右侧2号磁环传感器6分别用于判断右侧穿销是否进入穿销孔和是否到达指定位置。
29.实施例3:所述用于水电站叠梁门操作门机抓梁定位的智能化检测系统的使用方法,包括以下步骤:步骤1:在每个定位销会安装两个磁环,分别为左侧定位销1号磁环传感器16、左侧定位销2号磁环传感器14、右侧定位销1号磁环传感器9和右侧定位销2号磁环传感器7;左侧定位销1号磁环传感器16和右侧定位销1号磁环传感器9安装在定位销主干的最底端,用于判断定位销是否进入叠梁门的销孔;左侧定位销2号磁环传感器14和右侧定位销2号磁环传感器7的安装位置是抓梁的定位销与叠梁门的销孔对齐时定位销所在的位置;步骤2:右侧穿销处需要在液压缸处安装右侧压力传感器3,右侧1号磁环传感器4、右侧2号磁环传感器6和右侧1号永磁铁5;左侧穿销处需要在液压缸处安装左侧压力传感器10,左侧1号磁环传感器12、左侧2号磁环传感器13和左侧1号永磁铁11;右侧1号永磁铁5和
左侧1号永磁铁11对应安装在抓梁的穿销孔的出口处,由于永磁铁不能承受力,所以永磁铁的直径应大于叠梁门的销孔,右侧压力传感器3和左侧压力传感器10安装在液压缸的内部,所需要的信号和电源与液压缸的电源共同使用,工作时贴在穿销表面的磁环传感器与压力传感器实现共同通信;步骤3:所有的传感器作为信息收集模块,工控机1作为信息处理模块,工控机1的安装位置在门式起重机的控制区域,用于实时反馈抓梁的工作状态;步骤4:叠梁门的内部是空心的,工控板安装在叠梁门的内部;步骤5:在门式起重机开始工作后,将门式起重机上的所有磁环传感器接通电源,抓梁开始运行;首先进行叠梁门定位,当定位销上的左侧定位销1号磁环传感器16和右侧定位销1号磁环传感器9对应通过固定在叠梁门上的左侧2号永磁铁15和右侧2号永磁铁8时,永磁铁磁场和磁环传感器上的磁场相交,会在磁铁检测装置上返回一个应变脉冲,此时磁环传感器将磁场信号转换为电信号,由连接线上传至工控板2,工控板2将信号处理后上传至工控机1,当工控机1接收到这个信号时,工控机1根据系统判定方法中的逻辑对信号进行判断,当左侧定位销1号磁环传感器16和右侧定位销1号磁环传感器9同时获取信号后,抓梁继续工作,向下运动,在左侧2号永磁铁15和右侧2号永磁铁8的磁场和左侧定位销2号磁环传感器14和右侧定位销2号磁环传感器7上的磁场相交之后,磁环传感器将会第二次传回电信号,当工控板2将此信号上传至工控机1后,工控机1发出指令,使定位销停止工作;穿销开始工作,穿销液压缸处的压力传感器和穿销外壁的磁环传感器开始获取穿销的信号,连接线路将获取的信号上传至工控机处,然后根据系统判定方法对信号进行判断,当压力传感器和磁环传感器的数据信号正常时,表明穿销已准确进入销孔,系统工作完毕,抓梁吊起叠梁门。
30.实施例4:实施例选择起重机领域进行应用,当司机在驾驶起重机起吊叠梁门时,由于本发明能够实时提供抓梁与叠梁门结合状态,而一套可实时监测抓梁与叠梁门结合状态的系统能够为司机准确操控叠梁门提供依据。例如,按照如图3的方式在抓梁上安装如图1所示的系统部件,假如叠梁门所在的位置在水下100m的位置,抓梁在水下的运行速度通常为0.6m/s,则抓梁到达叠梁门的位置大约需要2分46秒到达指定位置,抓梁在定位时运行的速度为0.5~1.5m/min,所以抓梁从如水到定位销进入销孔最多需要3分46秒左右,在超出该时间后,工控机发出提示信号,提示定位销需要重新定位。
31.之后抓梁停止动作,穿销运行,准备吊起叠梁门。通常液压缸匀速推动穿销工作时,压力是恒定的,而且大约30秒内就可以实现信号的回馈,如果规定时间内压力传感器正常但没有回馈电信号,则工控机发出提示信号,磁环可能掉落了,需要重新修理。若是规定时间有正常的电信号但压力传感器增大,则工控机发出提示信号,有异物堵塞销孔,提示工作人员清理异物,若是规定时间有正常的电信号而且压力传感器也正常,则工控机提示系统正常工作,工作完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1