一种焦平面的指示棱镜标定方法与流程
1.本发明涉及航天遥感装配技术领域,尤其涉及一种焦平面的指示棱镜标定方法。
背景技术:
2.指示棱镜,其一般采用立方体棱镜,粘接在机械座上,在设计时要露在结构体外部,方便测量,指示部件的本体坐标系,方便对单机进行测量;
3.其中,立方体棱镜是一种在卫星装配领域内经常使用的辅助工具,一般采用石英晶体,表面镀有反射膜,制造精度高,棱镜一般与机械件粘接后通过螺钉连接安装在固定主部件上,作为主部件的参考基准,辅助测量。指示棱镜一般选相邻两个面垂直度为2
″
,基准棱镜通常放置于部件表面,引出部件相邻两个垂直面的俯仰参数一般选相邻两个面垂直度优于1
″
,通常采用接触面贴合的方式将部件坐标系引出;
4.目前,在航天遥感装配过程中,针对焦平面部件来说,由于后续测试工作需要多次使用其坐标系指示焦平面坐标系,因此,如何通过指示棱镜指示焦平面的各个方向、并为后续焦平面的使用提供精准方位,成为了本领域技术人员亟需解决的重要问题。
技术实现要素:
5.本发明的目的是克服现有技术存在的缺陷,提供一种焦平面的指示棱镜标定方法。
6.为了实现上述目的,本发明提供如下技术方案:
7.本发明公开的一种焦平面的指示棱镜标定方法,该方法包括以下步骤:
8.s1:安装焦平面基板;
9.将工装安装到ccd拼接仪平台上,再将所述焦平面基板通过所述工装连接到所述ccd拼接仪平台上;
10.s2:调整所述焦平面基板坐标系;
11.将千分表固定在所述ccd拼接仪上,操作所述ccd拼接仪,通过所述ccd拼接仪带动所述千分表将所述焦平面基板上表面、侧面分别调整到与所述ccd拼接仪坐标系方向一致;
12.s3:将指示棱镜用螺钉安装至所述焦平面基板上;
13.s4:通过研磨调整所述指示棱镜坐标系;
14.将所述指示棱镜放置在所述焦平面基板上表面,使用两台光学经纬仪分别准直所述指示棱镜的+y面与+x面两个镜面,读出两台所述经纬仪的俯仰角读数,将所述指示棱镜的+x面与+y面俯仰修至与基准棱镜一致,将光学平尺贴合所述焦平面基板侧面,调整所述指示棱镜+x方向的偏摆与光学平尺一致;
15.s5:安装ccd组件;
16.s6:调整ccd组件坐标系,通过所述操作ccd拼接仪,将所述ccd组件坐标系调整至与所述ccd拼接仪坐标系一致,使得所述指示棱镜与所述ccd组件坐标系一致,即可最终实现棱镜标定。
17.进一步的,所述ccd组件包括ccd和ccd机械座,所述ccd安装在所述ccd机械座上表面,ccd机械座安装于焦平面基板上表面。
18.在上述技术方案中,本发明提供的一种焦平面的指示棱镜标定方法,有益效果:
19.本发明焦平面的指示棱镜标定方法,采用ccd拼接仪作为媒介,将焦平面基板、指示棱镜坐标系调整一致,最后的焦平面棱镜标定结果可使得焦平面与棱镜的最大标定误差为5.2
″
,实现了为后续焦平面的使用提供精准方位,且棱镜在后续的使用中效果较好。
附图说明
20.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
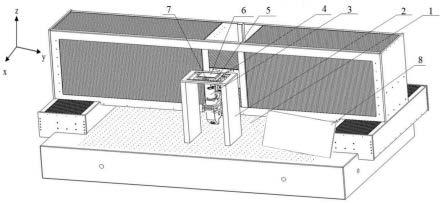
21.图1是本发明公开的ccd拼接仪装配现场示意图;
22.图2是图1的局部放大图;
23.图3是本发明公开的工装安装光学平尺示意图;
24.图4是本发明公开的经纬仪标定示意图。
25.附图标记说明:
26.ccd拼接仪1;工装2;高倍显微镜3;焦平面基板4;ccd机械座5;ccd6;指示棱镜7;显示成像系统8;基准棱镜9;光学平尺10。
具体实施方式
27.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
28.参见图1-4所示;
29.发明一种焦平面的指示棱镜标定方法,该方法包括以下步骤:
30.s1:安装焦平面基板4;
31.首先,设计特制辅助装配工装2,包含两个支架和一个承载板,承载板连接在两个支架之间,通过承载板承载焦平面基板4,组装时,先将工装2安装到ccd拼接仪1平台上,再组装焦平面基板4,从而将焦平面基板4通过工装2连接到ccd拼接仪1平台上;
32.s2:调整焦平面基板4坐标系,将千分表固定在ccd拼接仪1上,操作ccd拼接仪1,通过ccd拼接仪1带动千分表将焦平面基板4上表面、侧面分别调整到与ccd拼接仪1坐标系方向一致;
33.s3:将指示棱镜7用螺钉安装至焦平面基板4上;
34.s4:通过研磨调整指示棱镜7坐标系;
35.将指示棱镜7放置在焦平面基板4研磨端面的位置上,参见图4所示,使用两台光学经纬仪分别准直指示棱镜7的+y面与+x面两个镜面,读出两台经纬仪的俯仰角读数,将指示棱镜7的+x面与+y面俯仰修至与基准棱镜9一致,将光学平尺10贴合焦平面基板4侧面,调整指示棱镜7+x方向的偏摆与光学平尺10一致;
36.s5:安装ccd组件,该ccd组件包括ccd6和ccd机械座5;具体的,ccd6安装在ccd机械座5上表面,ccd机械座5安装于焦平面基板4上表面;
37.s6:调整ccd组件坐标系;
38.通过操作ccd拼接仪1将ccd组件坐标系调整至与ccd拼接仪1坐标系一致,使得指示棱镜7与ccd组件坐标系一致,即可最终实现棱镜标定。
39.具体的,ccd拼接仪1是一种采用大理石做工作平台,由北京辰阳自动化有限公司生产,产品型号pjy-003,二维工作台和升降台采用滚珠直线导轨做导向,进给传动采用滚珠丝杠、长工作距离显微镜进行对准和检测。其中,在测量范围为0-200mm范围内,ccd拼接仪1直线导轨导向精度为0
″
,正交为0
″
;在200mm以上,直线导轨导向精度为2
″
,正交为2
″
,进给分辨率为1μm,ccd拼接仪1的作用主要有两个,一个是可以将ccd拼接仪本体坐标系通过千分表调整到与焦平面基板4一致,另一个是将焦平面基板4上的焦平面坐标系调整至与ccd拼接仪1一致,z轴的长工作距离显微镜焦深优于0.002mm,可通过千分尺将焦平面基板4上的焦平面与ccd拼接仪1在200mm范围内各个方向安装精度调整至0.002mm以内,ccd拼接仪1的作用是坐标系转换的媒介。
40.其中,使用测量精度为0.002mm的机械千分表,将其固定于ccd拼接仪1上,用于调整焦平面基板4的位置,保证焦平面基板4、ccd拼接仪1的坐标系一致。
41.一般采用光学平尺10或者普通的光学平面镜将焦平面基板端面坐标系引出来,工作的时候将其放置在工装2上表面,使用一个平面将其贴合在焦平面基板的机械加工端面,将机械端面方向引导至光学平尺10上,通过光学平面引出面的偏摆方向,作用与基准棱镜9一致。
42.焦平面基板4主要作为承载焦平面的主承力结构,由于对精度的苛刻要求,对形位公差要求很高,连接端面平面度优于0.002mm。
43.在上述技术方案中,本发明提供的一种焦平面的指示棱镜标定方法,该方法通过ccd拼接仪1与经纬仪将焦平面的坐标系方向转移给基准棱镜,满足了焦平面基准棱镜测量安装要求,可实现不同焦平面基准棱镜的测量安装要求,该方法在吉林一号高分xx星的焦平面棱镜标定中多次被使用,最大标定误差5.2
″
,在后续的测试工作中使用效果较好,棱镜标定方法切实有效;
44.以吉林一号某型号卫星焦平面为例,按照上述步骤,标定指示棱镜7,通过多次复测,得到如下指示棱镜标定数据:
45.焦平面基板4标定误差:通过使用拼接仪1带动机械千分表在焦平面基板4表面以及侧边(分别为图2箭头所示端面与方向)方向上调整焦平面基板4与拼接仪1的相对位置,多次复测调整将焦平面基板4各方向精度调整至优于0.002mm,三个方向分别是-x、+y、+y方向侧边,测量长度分别为150mm,150mm,180mm,误差分别为:
46.+y方向侧边误差:e(+y')=arctan(0.002/180)=2.29
″
[0047]-x方向误差:e(-x)=arctan(0.002/150)=2.75
″
[0048]
+y方向误差:e(+y)=arctan(0.002/150)=2.75
″
[0049]
由上述得到焦平面基板4角度误差分别为:
[0050]
+y方向俯仰角度:
[0051]
el'=[e(-x)2+e(+y)2]
0.5
=[arctan2(0.002/150)+arctan2[0052]
(0.002/150)]
0.5
=3.89
″
;
[0053]-x方向俯仰角度:
[0054]
er'=e[e(+y)2+e(-x)2]
0.5
=[arctan2(0.002/150)+arctan2[0055]
(0.002/150)]
0.5
=3.89
″
;
[0056]-x方向偏摆角度:
[0057]
ep'=e(+y')=2.29
″
。
[0058]
调整ccd组件坐标系:ccd6尺寸为61.44mmx32mm,使用拼接仪1高倍显微镜调整ccd6位置,拼接仪1在200mm范围内直线导轨导向精度约为0
″
,正交精度0
″
,将ccd6与拼接仪1的各个方向装配精度角度调整为0秒;
[0059]
指示棱镜7标定:将基准棱镜9放置于焦平面基板4上,光学平尺与焦平面基板侧面靠齐贴紧,修研调整指示棱镜7角度得到以下数据:
[0060]
基准棱镜9经纬仪+y方向与-x方向角度读数分别为:
[0061]
(0,89.9473)(0,89.8935)
[0062]
指示棱镜7经纬仪+y方向与-x方向角度读数分别为:
[0063]
(0,89.9481)(0,89.8928)
[0064]
光学平尺10(-x方向偏摆角度)经纬仪正向读数为:(0,89,9291)
[0065]
指示棱镜7标定角度误差分别为:
[0066]
+y方向俯仰角度:
[0067]
el"=(89.9473-89.9481)x3600=2.88
″
;
[0068]-x方向俯仰角度:
[0069]
er"=(89.8935-89.8928)x3600=2.52
″
;
[0070]-x方向偏摆角度:
[0071]
ep"=(0-0)x3600=0
″
。
[0072]
由上述,考虑棱镜自身各方向垂直度误差2
″
,指示棱镜7与焦平面组件的最终装配误差:
[0073]
+y方向俯仰角度:
[0074]
el=[el'2+el"2+22]
0.5
=5.2
″
;
[0075]-x方向俯仰角度:
[0076]
er=[er'2+er"2+22]
0.5
=5.04
″
;
[0077]-x方向偏摆角度:
[0078]
ep=[ep'2+ep"2+22]
0.5
=3.04
″
;
[0079]
因此,指示棱镜7+y方向俯仰角度误差最大,最大标定误差为5.2
″
。
[0080]
本发明焦平面的指示棱镜标定方法,采用ccd拼接仪作为媒介,将焦平面基板、指示棱镜坐标系调整一致,最后的焦平面棱镜标定结果可使得焦平面与棱镜的最大标定误差为5.2
″
,实现了为后续焦平面的使用提供精准方位,且棱镜在后续的使用中效果较好。
[0081]
以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1