一种基于沙氏成像原理的激光三维关联成像方法及其装置
1.本发明涉及一种基于沙氏成像原理的激光三维关联成像方法及其成像装置,属于光学成像技术领域。
背景技术:
2.二维成像丢失了物体的深度信息,已经渐渐不能满足人们的需求,如在卫星测量、自动驾驶、遥感探测、医学影像等领域中,数据信息更为丰富的激光三维成像占有重要地位。基于飞行时间(time of fly)方法的三维激光雷达是发射高强度脉冲激光探测到物体之后折返,用雪崩二极管(adp)收集回波信号,根据发射和接收信号之间的时间差确定物体距离,想要提高精度必须使用高频率的计时时钟,对硬件要求极大。该方法的探测方式有扫描成像和凝视成像两种,其中,扫描式难以实现高帧频实时成像,并且对扫描装置有要求;凝视式受到adp面阵尺寸的限制,难以提高成像视场和分辨率。在除了tof方法之外的三维成像方法中,条纹管激光雷达和沙氏三维成像方法均需要扫描装置,无法实现高帧频实时成像,且前者装置复杂、工作波段受限,后者的探测精度受到光束展宽的影响。上述三维成像方法的图像信息获取效率和成像分辨率分别受奈奎斯特采样定理和光学成像系统衍射极限的限制,存在较大技术瓶颈。
3.根据热光场关联成像发展起来的三维激光关联成像雷达(参见文献:gong w, zhao c, yu h, et al. three-dimensional ghost imaging lidar via sparsity constraint[j]. scientific reports, 2016, 6(1): 1-6.),通过调控光场涨落和单像素探测器接收目标回波信号、采用计算重构方法获取目标的图像信息,是一种凝视成像模式。目前有采用窄脉冲的空间调制激光照明和回波信号强度探测模式,以及采用长脉冲的时空两维调制激光照明和回波信号外差探测模式的激光三维关联成像。其利用时间分辨能力的单像素探测器获取目标场景的三维图像信息,不但图像信息获取效率可以突破奈奎斯特采样定理的限制,而且还可以突破光学系统衍射极限对空间分辨率的限制。但是重构需要多次采样影响成像速率,且成像视场受限,无法实现大视场、高帧频、高分辨三维成像。
技术实现要素:
[0004]
本发明针对现有三维成像技术存在的不足,提供一种基于沙氏成像原理的激光三维关联成像方法及其成像装置,实现成像速率和成像视场的大幅度提升。
[0005]
为解决现有技术存在的不足,本发明的技术解决方案是提供一种基于沙氏成像原理的激光三维关联成像装置,它包括激光器、幅度调制器、发射透镜、待测物体、收光透镜、面阵探测器和计算机;所述幅度调制器以事先设定的编码对激光发出的均匀光束进行振幅调制,发射透镜将调制光场成像于待测物体上,物体的反射光经收光透镜后以沙氏成像的方式成像于面阵探测器上;所述的幅度调制器和面阵探测器的输出端同时连接执行二阶关联运算和沙氏距离计算的计算机,所述的激光光源、幅度调制器和面阵探测器同时由一个同步信号发生
器同步触发控制同时工作。对面阵探测器上每个像元记录的光强和预设编码进行二阶关联运算,提取一系列层析面的空间信息,结合沙氏成像计算距离,经过遍历提取待测物体的三维空间信息。
[0006]
本发明提供的一种基于沙氏成像原理的激光三维关联成像装置,其幅度调制器的预设编码为随机产生的k个0/1二值分布的无重叠散斑图像,k个随机产生的散斑图像的对应空间位置叠加呈均匀光分布。所述的沙氏成像的方式是指收光透镜平面、面阵探测器平面和发射透镜的主光轴平面彼此相交,面阵探测器的不同像元以角度分辨的方式探测到不同距离的物体。
[0007]
本发明技术方案还包括一种基于沙氏成像原理的激光三维关联成像方法,采用上述的成像装置,包括以下步骤:
①
幅度调制器的编码预设幅度调制器预先设定的编码方式为产生的k个0/1二值分布的随机散斑图像无重叠,k个随机散斑图像的对应空间位置叠加呈均匀光分布;
②
基于沙氏成像原理的物体信息采集预设编码的幅度调制器对激光器发出的均匀光束进行0/1幅度调制得到调制光源,经发射透镜成像到待测物体处,生成一个景深范围内的三维测量空间;待测物体的反射信号经过收光透镜,被面阵探测器以沙氏成像的方法并行采集,由计算器记录;所述的激光器、幅度调制器和面阵探测器由一个同步信号发生器同步触发控制同时工作;
③
物体层析面的空间和距离信息提取(a)将面阵探测器上所有像元采集并记录的光强信号依次与预先设定的编码方式做二阶关联运算,得到一系列层析面的空间信息,层析面的分辨率为幅度调制器的像素数;(b)根据面阵探测器上像元的空间位置,通过沙氏成像关系,计算出该像元的沙氏探测距离,结合该像元记录的光强信号通过二阶关联运算得到的层析面的空间信息特征,计算得到对应层析面的距离信息;
④
遍历面阵探测器上的所有像元,将一系列层析面的空间信息和距离信息一一对应,获得待测物体的三维重建图像。
[0008]
本发明技术方案中,所述计算机进行二阶关联运算方法为:利用幅度调制器生成服从伯努利分布的 大小的随机散斑作为测量矩阵,随机散斑的像被待测物体反射后被
ꢀꢀ
像素的面阵探测器采集,作为信号矩阵,将面阵探测器每个像元采集到的光强依次与测量矩阵n个像素的光强的乘积的均值减去二者均值的乘积,得到一张n像素的图片,即为对应层析面的空间信息,遍历面阵探测器像元得到m幅像素大小为n的层析面的空间信息。
[0009]
本发明技术方案中,所述利用层析面空间信息和像素位置计算层析面距离信息的方法为:根据层析面空间信息得到层析面上的点到图像中心的纵向距离,利用面阵探测器上像素位置计算出其对应的沙氏探测距离和采样角,由纵向距离和采样角得到层析面和沙氏探测距离之间的距离差值,由此得到层析面的距离信息。
[0010]
本发明提供的成像装置在系统结构上将原来的均匀光场变为调制光场,使用无时间分辨能力的面阵探测器,以角度分辨的方式并行接收不同距离的物体信息,免去复杂的扫描结构;在成像方法上,图像分辨率由发射端决定(重建物体的图像分辨率由幅度调制器
决定),使用像素数较多的面阵探测器扩大成像视场,通过关联成像和沙氏成像的结合,在采样数极低的情况下实现三维物体实时成像,大幅度提升成像视场和成像速率。
[0011]
与现有技术相比,本发明具有以下的技术效果:1.与基于飞行时间法的激光三维关联成像相比,本发明所述的面阵探测器无需时间分辨能力,同时采用并行探测的方式,在样本数极低的条件下便可以实现大视场的实时三维成像。
[0012]
2.与条纹管激光雷达相比,本发明无需狭缝或者机械扫描,在凝视探测的条件下便可以获取目标三维图像信息,且工作波段范围广、成本低。
[0013]
3.与现有的沙氏激光三维成像方法相比,本发明不存在机械扫描结构,相同的成像视场所需的激光辐照脉冲次数更少。
附图说明
[0014]
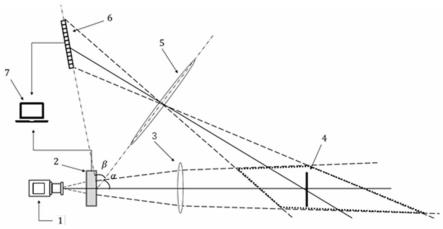
图1是本发明实施例提供的基于沙氏成像原理的激光三维关联成像装置的结构示意图;图2是采用本发明实施例提供的基于沙氏成像原理的激光三维关联成像方法中,利用沙氏成像计算物体层析面距离信息的原理图;图3和图4分别是本发明实施例提供的一种基于沙氏成像原理的激光三维关联成像方法及其装置中的待测物体和提取物体三维信息示意图;图中:1是激光光源;2是振幅调制器;3是发射透镜;4是待测物体;5是收光透镜;6是具有高分辨能力的面阵探测器;7是计算机;8是物平面;9是层析面;10是层析面的空间信息;11是距离为35.2米的层析面;12是距离为35.1米的层析面。
具体实施方式
[0015]
下面结合附图和实施例对本发明技术方案作进一步说明。
[0016]
实施例1参见附图1,是本实施例提供的一种基于沙氏成像原理的激光三维关联成像装置的结构示意图。由图1可见,成像装置包括激光光源1、幅度调制器2、发射透镜3、待测物体4、收光透镜5、面阵探测器6和计算机7。幅度调制器2以事先设定的编码对激光器1发出的均匀光束进行振幅调制,经发射透镜3成像于待测物体上,产生一系列在景深范围内的层析面,其分辨率由振幅调制器2的像素数决定;待测物体4的反射信号经收光透镜4以沙氏成像的方式被面阵探测器6并行采集,以角度分辨的方式探测不同距离的物体,不同像元位置对应不同距离的层析面,实现在低采样数下的三维实时成像;所述的幅度调制器2和面阵探测器6的输出端同时连接执行关联运算和沙氏距离计算的计算机7,所述的激光器1、幅度调制器2和面阵探测器6同时由一个同步信号发生器同步触发控制同时工作。计算机7对面阵探测器6上每个像元记录的光强和预设编码进行二阶关联运算,提取一系列层析面的空间信息,结合层析面空间信息特征和沙氏成像计算距离,遍历面阵探测器6上的所有像元,将一系列层析面的空间信息和距离一一对应,便可以获得待测物体的三维空间图像。
[0017]
本装置工作过程中,激光光源1、幅度调制器2和面阵探测器6由一个同步信号发生器(图中未示)同步触发控制同时工作:具体步骤如下:
(1)激光器1发射均匀光束被幅度调制器2以预设编码方式调制,生成服从伯努利分布的像素数为 (幅度调制器2的像素数)的随机散斑,经发射透镜3成像到待测物体4处,形成景深范围内的三维测量空间,三维测量空间内一系列层析面的像素数等于幅度调制器2的像素数,即成像分辨率由发射端决定,不受接收端的影响;(2)收光透镜5所在平面、面阵探测器6所在平面和发射透镜3的主光轴平面彼此相交,其中发射透镜3的主光轴平面与收光透镜5所在平面的倾斜角为 ,收光透镜5所在平面与面阵探测器6所在平面的倾斜角为β,形成沙氏探测。不同于理想沙氏成像条件下面阵探测器6只能探测一个二维平面,需要扫描装置辅助完成三维重构的情况,由于光束展宽,此时面阵探测器6直接探测到一个三维空间,以较少的激光辐照脉冲次数达到与沙氏三维成像方法相同的成像视场;(3)由所述的面阵探测器6接收并记录来自待测物体4的反射光的随面阵探测器位置的光强分布信息,根据沙氏成像,面阵探测器6上不同位置的像元探测到物体不同距离的层析面,并且面阵探测器6的像素数越多,测量视场越大,层析面越多,即待测物体4的反射信号通过收光透镜5,以沙式成像的方式由不具有时间分辨能力的面阵探测器6并行采集,在不需要任何额外装置的情况下,以角度分辨的方式获取物体的距离信息,实现大视场三维凝视成像,成本低且工作波段极广;(4)计算机7对面阵探测器6的
ꢀꢀ
个像素采集到的光强依次与预设编码方式(幅度调制器为
ꢀꢀ
像素)做点对点关联运算,得到m幅像素数为n的图片,即为三维测量空间内m个层析面的空间信息;对比三维关联成像技术单次测量只能提取一个层析面空间信息的情况,本方法可在极低的采样次数下重构待测物体;(5)根据层析面的空间信息特征计算面上点到中点的纵向距离,结合对应的像元位置,由沙氏成像计算像素探测距离和采样角,得到层析面的距离,遍历面阵探测器6上的所有像素提取待测目标的三维信息。
[0018]
在本发明实施例提供的基于沙氏成像原理的激光三维关联成像方法中,通过二阶关联运算提取物体空间信息的方法为:幅度调制器2以预先设定的编码方式对激光器发出的均匀光束进行0/1幅度调制,经发射透镜3成像到待测物体4处,物体的反射信号经收光透镜5被面阵探测器6以沙氏成像的方式收集。在此过程中,设定待测物体4为x(n*1,n为物体像素数,由幅度调制器2的像素数决定),幅度调制器2预先设定的编码方式为测量矩阵a(k*n),面阵探测器6像元接收到的光强分布为信号矩阵y(k*1),则根据关联成像理论,有
ꢀꢀꢀ
(1)其中,为待测物体的像;为传统成像过程中,被发射透镜3成像到待测物体4处的散斑场和测量矩阵的相似比;为沙式成像过程中,面阵探测器6采集的散斑场和被物体反射的散斑场的相似比;k为采样次数;i为k*1的单位矩阵;代表取平均值;代表测量矩阵散斑场的随机涨落。
[0019]
因此,利用图1所示的沙氏激光三维关联成像装置的结构示意图,只需将面阵探测器6记录的光强分布y和预设编码方式a代入式(1)中,在满足一定的成像条件下便可以提取
待测目标的空间信息。对于像素数为的幅度调制器2和像素数为的面阵探测器6,经上述运算得到m幅像素数为n的图像,即为对应m个层析面的空间信息。
[0020]
参见附图2,是本实施例提供的一种基于沙氏成像原理的激光三维关联成像方法中,利用沙氏成像计算物体层析面距离信息的原理图。由图2可见,该装置包括在物平面8和收光透镜5平面不平行时,只要将面阵探测器6平面倾斜一定角度,使得物平面8、收光透镜5平面和面阵探测器6彼此相交,也可对物平面8上的物体清晰成像。图2中z方向为激光发射方向,根据面阵探测器6上探测像素位置的不同,对应z方向上不同的距离为:
ꢀꢀꢀ
(2)其中,为收光透镜5的中点到z轴的距离,为收光透镜5平面和z轴的夹角,为面阵探测器6平面和收光透镜5平面的夹角,为收光透镜的中点到面阵探测器6的距离其中,f为收光透镜5的焦距;为面阵探测器6上的像素距离;其中,为面阵探测器6的总像素数,为面阵探测器6的像素索引,为像素宽度。
[0021]
通过关联运算提取的层析面9的层析面的空间信息10(图中黑点),计算层析面的空间信息10(黑点)到图片中心的纵向距离,根据,由式(2)得到z轴上的距离和像素采样角,则层析面9在z轴上的距离为:
ꢀꢀꢀꢀꢀ
(3)参见附图3和4,图3是本实施例提供的一种基于沙氏成像原理的激光三维关联成像方法及其装置中的待测物体,由距离为35.2米的层析面11上的大写字母g和距离为35.1米的层析面12上的大写字母i构成; 图4是本发明提取物体三维信息示意图,z方向代表距离信息。根据式(1)提取一系列层析面的空间信息,根据式(3)计算出对应层析面的距离信息,遍历面阵探测器的像元,将一系列层析面的空间信息和距离信息一一匹配,在极低的采样率(4096像素采样50次,约1%)下得到三维重建结果如图4所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1