磁传感器装置和磁传感器系统的制作方法
磁传感器装置和磁传感器系统
技术区域
1.本发明涉及具备磁传感器和支承体的磁传感器装置。
背景技术:
2.近年来,以各种用途使用检测施加的磁场的多个方向的分量的磁传感器装置。作为该磁传感器装置的用途,存在检测能够三维地移动的磁铁的位置的磁性式位置检测装置。
3.磁性式位置检测装置,例如具备:磁传感器装置、能够沿以该磁传感器装置为中心的规定的球面移动的磁铁、和信号处理电路。磁传感器装置检测通过磁铁产生并施加于磁传感器装置的磁场的相互不同的3个方向上的3个分量,生成与该3个分量对应的3个检测信号。信号处理电路基于3个检测信号生成表示磁铁的位置的位置信息。在中国专利申请公开第101203769a号说明书中,公开有具备x轴传感器、y轴传感器和z轴传感器的3轴磁传感器。
4.为了提高位置信息的精度,谋求提高磁传感器装置的检测精度。在日本专利申请公开2015-95630号公报中,公开有一种磁传感器,其将第一磁阻效应元件的自由层的磁化的方位与第二磁阻效应元件的自由层的磁化的方位设为彼此反方向,以降低因钉扎层的磁化的方位偏差而引起的外部磁场的检测精度的下降。此外,在国际公开2012/172946号和国际公开2015/125699号中,公开有一种磁传感器,其使一对磁阻效应元件的各自由磁性层的磁化方向朝向彼此相反方向,抑制了因被测定磁场的方向的偏离而引起的传感器输出的直线性的下降。
5.并且,在位置检测装置的使用时,有时对搭载有磁传感器装置的基板,施加有意外的外力。此外,有时基板的温度由于环境的变化而变化。在这些情况下,对磁传感器装置施加有应力,其结果是,有时在磁传感器装置的检测信号中产生误差。
6.此处,考虑基板的平面形状为矩形等单纯的形状的情况。在因外力或温度而在基板内产生应力的情况下,基板内的应力分布,成为以基板的平面形状的重心为中心而对称。因此,为了抑制应力的影响,考虑以磁传感器的平面形状的重心与基板的平面形状的重心重合的方式,将磁传感器搭载于基板。但是,在如中国专利申请公开第101203769a号说明书中公开的那样的3轴磁传感器中,不能将所有的传感器如上述那样搭载。此外,在实际的基板,存在端子等磁传感器以外的结构要素。因此,有时不能将磁传感器如上述那样搭载。
技术实现要素:
7.本发明的目的在于,提供一种能够抑制施加的应力的影响的磁传感器装置和磁传感器系统。
8.本发明的磁传感器装置具备:至少1个磁传感器,其包含多个磁阻效应元件和用于配置所述多个磁阻效应元件的元件配置区域,并且以检测作为检测对象的磁场的对象磁场的方式构成;和支承体,其支承所述至少1个磁传感器,并且具有基准平面。在从第一基准方向观察时,元件配置区域的重心从基准平面的重心偏离。第一基准方向为与基准平面垂直
的方向。
9.至少1个磁传感器还包含:第一电阻部和第二电阻部,其在作为电连接第一连接点与第二连接点的路径的第一路径串联连接;和第三电阻部和第四电阻部,其在作为电连接第一连接点与第二连接点的路径的第二路径串联连接。第一电阻部和第四电阻部与第一连接点连接。第二电阻部和第三电阻部与第二连接点连接。多个磁阻效应元件构成第一至第四电阻部。多个磁阻效应元件中的各个包含:具有方向固定的磁化的磁化固定层、具有方向能够根据对象磁场而变化的磁化的自由层、和配置在磁化固定层与自由层之间的间隙层。
10.第一和第三电阻部各自的磁化固定层的磁化包含第一磁化方向的分量。第一磁化方向为与第一基准方向交叉的方向。第二和第四电阻部各自的磁化固定层的磁化包含第二磁化方向的分量。第二磁化方向为与第一基准方向交叉的方向且与第一磁化方向为相反的方向。第一至第四电阻部中的2个电阻部各自的自由层的磁化,在未对至少1个磁传感器施加对象磁场的情况下,包含第三磁化方向的分量。第三磁化方向为与第一基准方向交叉的方向且与为第一磁化方向正交的方向。第一至第四电阻部中的另外2个电阻部各自的自由层的磁化,在未对至少1个磁传感器施加对象磁场的情况下,包含第四磁化方向的分量。第四磁化方向为与第一基准方向交叉的方向且与第三磁化方向为相反的方向。
11.在本发明的磁传感器装置中,第一和第二电阻部各自的自由层的磁化,在未对至少1个磁传感器施加对象磁场的情况下,也可以包含第三磁化方向的分量。第三和第四电阻部各自的自由层的磁化,在未对至少1个磁传感器施加对象磁场的情况下,也可以包含第四磁化方向的分量。或者,第一和第四电阻部各自的自由层的磁化,在未对至少1个磁传感器施加对象磁场的情况下,也可以包含第三磁化方向的分量。第二和第三电阻部各自的自由层的磁化,在未对至少1个磁传感器施加对象磁场的情况下,也可以包含第四磁化方向的分量。
12.此外,在本发明的磁传感器装置中,第二基准方向上的、元件配置区域的重心从基准平面的重心的偏离也可以大于第三基准方向上的、元件配置区域的重心从基准平面的重心的偏离。第二基准方向和第三基准方向也可以为与第一基准方向正交的2个方向。在这种情况下,第一磁化方向相对于第二基准方向所成的角度也可以在大于0
°
且小于90
°
的范围内。
13.此外,在本发明的磁传感器装置中,至少1个磁传感器也可以还包含磁场产生器。磁场产生器也可以以对自由层施加与第一至第四磁化方向中的各个交叉的方向的磁场的方式构成。或者,磁场产生器也可以以对自由层施加第三磁化方向的磁场或第四磁化方向的磁场的方式构成。
14.此外,在本发明的磁传感器装置中,第二基准方向上的、元件配置区域的重心从基准平面的重心的偏离也可以大于第三基准方向上的、元件配置区域的重心从基准平面的重心的偏离。第二基准方向和第三基准方向也可以为与第一基准方向正交的2个方向。元件配置区域也可以包含:第一区域,其用于配置多个磁阻效应元件中的、构成第一电阻部的至少1个磁阻效应元件;第二区域,其用于配置多个磁阻效应元件中的、构成第二电阻部的至少1个磁阻效应元件;第三区域,其用于配置多个磁阻效应元件中的、构成第三电阻部的至少1个磁阻效应元件;和第四区域,其用于配置多个磁阻效应元件中的、构成第四电阻部的至少1个磁阻效应元件。第一至第四区域中的至少2个区域也可以,以在从第一基准方向观察时
至少2个区域各自的至少一部分夹着基准轴的方式,沿第三基准方向配置。基准轴也可以为通过基准平面的重心并且与第二基准方向平行的直线。
15.在第二基准方向上的、元件配置区域的重心从基准平面的重心的偏离大于第三基准方向上的、元件配置区域的重心从基准平面的重心的偏离的情况下,第二区域与第四区域也可以,以在从第一基准方向观察时夹着基准轴的方式,沿第三基准方向配置。第一区域也可以在从第一基准方向观察时,配置在第二区域与第四区域之间。第三区域也可以在从第一基准方向观察时,配置在第一区域与第二区域之间。或者,在这种情况下,第二区域与第三区域也可以,以在从第一基准方向观察时夹着基准轴的方式,沿第三基准方向配置。第一区域也可以在从第一基准方向观察时,配置在第二区域与第三区域之间。第四区域也可以在从第一基准方向观察时,配置在第一区域与第三区域之间。
16.或者,在这种情况下,第一区域与第四区域也可以,以在从第一基准方向观察时,第一至第四区域各自的至少一部分夹着基准轴的方式,沿第三基准方向配置。第二区域与第三区域也可以,以在从第一基准方向观察时,第二区域和第三区域各自的至少一部分夹着基准轴的方式,沿第三基准方向配置。第二区域与第三区域也可以分别相对于第一区域与第四区域,配置在与第二基准方向平行的一个方向的前方。在这种情况下,第一区域与第二区域也可以在从第一基准方向观察时,以与基准轴正交的假想的直线为中心对称地配置。第三区域与第四区域也可以在从第一基准方向观察时,以假想的直线为中心对称地配置。
17.此外,在第二基准方向上的、元件配置区域的重心从基准平面的重心的偏离大于第三基准方向上的、元件配置区域的重心从基准平面的重心的偏离的情况下,也可以,至少2个区域在从第一基准方向观察时,以基准轴为中心对称地配置。
18.此外,在这种情况下,元件配置区域的重心也可以在从第一基准方向观察时,与基准轴重叠。
19.此外,在本发明的磁传感器装置中,至少1个磁传感器也可以包含1个磁传感器。1个磁传感器也可以,以检测对象磁场的一个方向的分量并且生成与一个方向的分量具有对应关系的至少1个检测信号的方式构成。在这种情况下,本发明的磁传感器装置也可以还具备:包含1个磁传感器的芯片。芯片也可以安装在基准平面上。
20.此外,在本发明的磁传感器装置中,至少1个磁传感器也可以包含2个磁传感器。2个磁传感器也可以,以分别检测对象磁场的相互不同的2个方向的分量的方式构成。在这种情况下,本发明的磁传感器装置也可以还具备:包含2个磁传感器的芯片。芯片也可以安装在基准平面上。此外,在这种情况下,对象磁场的2个方向也可以分别为相对于基准平面与第一基准方向中的各个倾斜的方向。
21.此外,在本发明的磁传感器装置中,至少1个磁传感器也可以包含:第一磁传感器、第二磁传感器和第三磁传感器。第一磁传感器也可以以检测对象磁场的第一方向的分量的方式构成。第二磁传感器也可以以检测对象磁场的第二方向的分量的方式构成。第三磁传感器也可以以检测对象磁场的第三方向的分量的方式构成。磁传感器装置也可以还具备:包含第一磁传感器的第一芯片、和包含第二磁传感器和第三磁传感器的第二芯片。第一和第二芯片也可以安装在基准平面上,并且沿与第一基准方向正交的第二基准方向配置。在这种情况下,第一方向也可以为与基准平面平行的方向。第二方向也可以为相对于基准平
面和第一基准方向中的各个倾斜的方向。第三方向也可以为相对于基准平面和第一基准方向中的各个倾斜的另一方向。
22.此外,本发明的磁传感器系统具备:本发明的磁传感器装置和产生规定的磁场的磁场产生器。磁场产生器的相对于磁传感器装置的相对位置能够沿规定的球面变化。
23.本发明的磁传感器装置的制造方法具备:形成至少1个磁传感器的工序、和将至少1个磁传感器安装于支承体的工序。形成至少1个磁传感器的工序包含形成多个磁阻效应元件的工序。形成多个磁阻效应元件的工序包含:形成分别包含在之后成为磁化固定层的初始磁化固定层、自由层、和间隙层的多个初始磁阻效应元件的工序;和使用激光与外部磁场来固定初始磁化固定层的磁化的方向的工序。
24.在本发明的磁传感器装置和磁传感器系统中,以元件配置区域的重心从基准平面的重心偏离为前提,规定多个磁阻效应元件各自的磁化固定层的磁化的方向以及自由层的磁化的方向。由此,根据本发明,能够抑制施加的应力的影响。
25.本发明的其它的目的、特征和优势,通过以下的说明足以十分清楚。
附图说明
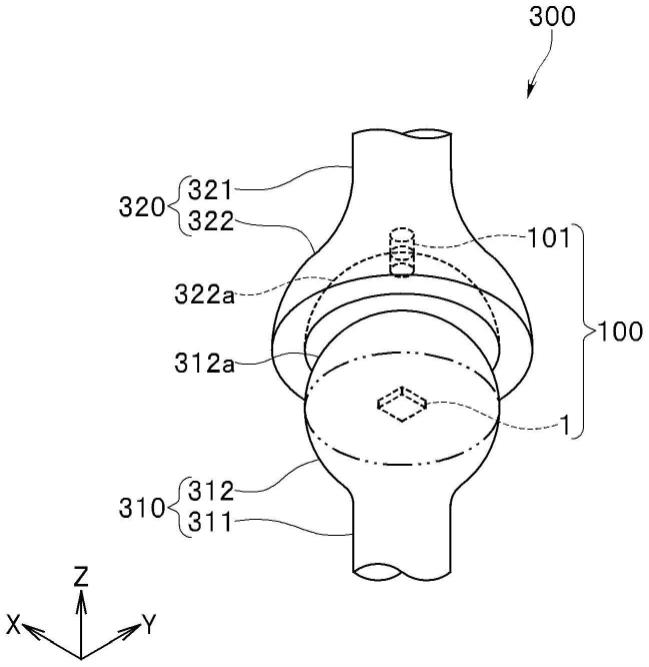
26.图1是示出包含本发明的第一实施方式所涉及的磁传感器系统的关节机构的概略的结构的立体图。
27.图2是示出图1所示的关节机构的概略的结构的截面图。
28.图3是用于说明本发明的第一实施方式所涉及的磁传感器系统的基准坐标系的说明图。
29.图4是示出本发明的第一实施方式所涉及的磁传感器装置的立体图。
30.图5是示出本发明的第一实施方式所涉及的磁传感器装置的俯视图。
31.图6是示出本发明的第一实施方式所涉及的磁传感器装置的侧面图。
32.图7是示出本发明的第一实施方式所涉及的磁传感器装置的结构的功能框图。
33.图8是示出本发明的第一实施方式的第一磁传感器的电路结构的电路图。
34.图9是示出本发明的第一实施方式的第二磁传感器的电路结构的电路图。
35.图10是示出本发明的第一实施方式的第三磁传感器的电路结构的电路图。
36.图11是示出本发明的第一实施方式的第一芯片的一部分的俯视图。
37.图12是示出本发明的第一实施方式的第一芯片的一部分的截面图。
38.图13是示出本发明的第一实施方式的第二芯片的一部分的俯视图。
39.图14是示出本发明的第一实施方式的第二芯片的一部分的截面图。
40.图15是示出本发明的第一实施方式的磁阻效应元件的立体图。
41.图16是用于说明本发明的第一实施方式的元件配置区域的配置的说明图。
42.图17是示意地示出本发明的第一实施方式的支承体内的应力分布的说明图。
43.图18是示出本发明的第一实施方式的变形例的磁阻效应元件的立体图。
44.图19是示出本发明的第二实施方式的第一磁传感器的电路结构的电路图。
45.图20是示出本发明的第二实施方式的第二磁传感器的电路结构的电路图。
46.图21是示出本发明的第二实施方式的第三磁传感器的电路结构的电路图。
47.图22是用于说明本发明的第三实施方式的元件配置区域的配置的说明图。
48.图23是用于说明本发明的第四实施方式的元件配置区域的配置的说明图。
49.图24是用于说明本发明的第五实施方式的元件配置区域的配置的说明图。
具体实施方式
[第一实施方式]
[0050]
以下,参照附图对本发明的实施方式进行详细地说明。首先,对应用有本发明的第一实施方式所涉及的磁传感器系统100的关节机构300进行说明。关节机构300是包含关节的机构。图1是示出关节机构300的概略的结构的立体图。图2是示出关节机构300的概略的结构的截面图。图3是用于说明磁传感器系统100的基准坐标系的说明图。
[0051]
如图1和图2所示,关节机构300包含:第一构件310、第二构件320和磁传感器系统100。
[0052]
第一构件310包含:轴部311和与该轴部311的长边方向的一端连结的球状部312。球状部312具有凸面312a。此处,假定包含凸面312a的假想的球面即第一球面。也可以说凸面312a由第一球面的一部分构成。第一球面中的、未包含在凸面312a的部分为轴部311与球状部312的边界部分。
[0053]
第二构件320包含:轴部321和与该轴部321的长边方向的一端连结的接受部322。接受部322具有凹面322a。此处,假定包含凹面322a的假想的球面即第二球面。也可以说凹面322a由第二球面的一部分构成。凹面322a也可以由第二球面中的一半或接近一半的部分构成。
[0054]
第一构件310与第二构件320,以球状部312嵌入接受部322的姿态,相互的位置关系可变地连结。第二球面的半径与第一球面的半径相等或者比其略大。凸面312a与凹面322a可以接触,也可以经由润滑剂相对。第二球面的中心与第一球面的中心一致或大体一致。第一构件310与第二构件320的连结部分为关节。特别在本实施方式中,该关节是球关节。
[0055]
磁传感器系统100具备磁传感器装置1和磁场产生器101。磁场产生器101相对于磁传感器装置1的相对位置能够沿规定的球面变化。磁传感器系统100是用于检测磁场产生器101相对于磁传感器装置1的相对位置的系统。
[0056]
磁场产生器101产生规定的磁场。磁场产生器101例如是磁铁。磁传感器装置1生成:与基准位置的磁场的相互不同的三个方向的分量具有对应关系的第一检测值、第二检测值和第三检测值。关于基准位置,在之后进行详细说明。
[0057]
如图1和图2所示,磁场产生器101以不从凹面322a突出的方式埋入接受部322。磁传感器装置1配置在球状部312的内部。以下,将第一球面的中心的位置称为基准位置。磁传感器装置1以检测基准位置的磁场的方式构成。
[0058]
以下,将由磁场产生器101产生的磁场中的基准位置的磁场称为对象磁场。对象磁场的方向例如与通过基准位置和磁场产生器101的假想的直线平行。在图2所示的例子中,磁场产生器101为具有沿上述的假想的直线排列的n极和s极的磁铁。s极比n极更靠近基准位置。图2所示的带箭头的多条虚线表示与磁场产生器101所产生的磁场对应的磁力线。
[0059]
在图1和图2所示的关节机构300,以球状部312嵌入接受部322的姿态,第二构件320相对于第一构件310的相对的位置可变化。由此,磁场产生器101相对于磁传感器装置1
的相对的位置能够沿上述的规定的球面变化。在本实施方式中,将磁场产生器101相对于磁传感器装置1的相对位置设为距磁场产生器101的基准位置最近的点的位置。规定的球面的中心与第一球面的中心一致或大体一致。规定的球面的半径为第一球面的半径以上。规定的球面的半径也可以与第一球面的半径或第二球面的半径一致。
[0060]
此处,参照图3,对本实施方式的基准坐标系进行说明。基准坐标系是以磁传感器装置1为基准的坐标系,并且是由3个轴定义的正交坐标系。在基准坐标系中,定义了x方向、y方向、z方向。如图3所示,x方向、y方向、z方向相互正交。此外,将x方向的相反的方向设为-x方向,y方向的相反的方向设为-y方向,z方向的相反的方向设为-z方向。
[0061]
如上所述,磁传感器装置1生成与基准位置的磁场的相互不同的三个方向的分量具有对应关系的第一检测值、第二检测值和第三检测值。在本实施方式中,特别地,上述的相互不同的三个方向是与x方向平行的方向、与y方向平行的方向和与z方向平行的方向。定义基准坐标系的3个轴是与x方向平行的轴、与y方向平行的轴和与z方向平行的轴。
[0062]
基准坐标系中的磁传感器装置1的位置不变化。当磁场产生器101相对于磁传感器装置1的相对位置变化时,基准坐标系中的磁场产生器101的位置沿上述的规定的球面变化。在图3中,附图标记102表示规定的球面。基准坐标系中的磁场产生器101的位置表示磁场产生器101相对于磁传感器装置1的相对位置。以下,将基准坐标系中的磁场产生器101的位置简称为磁场产生器101的位置。
[0063]
在包含磁传感器系统100的关节机构300中,通过由磁传感器系统100检测磁场产生器101相对于磁传感器装置1的相对位置,能够检测第二构件320相对于第一构件310的相对的位置。关节机构300能够用于机器人、工业设备、医疗设备、游乐设备等。
[0064]
磁传感器系统100除应用于关节机构300以外,还能够应用于操纵杆及轨迹球。
[0065]
操纵杆例如包含杆和能够摇动地支承该杆的支承部。在将磁传感器系统100应用于操纵杆中的情况下,例如以伴随着杆的摇动,磁场产生器101相对于磁传感器装置1的相对位置沿规定的球面变化的方式,在支承部的内部设置磁场产生器101,在杆的内部设置磁传感器装置1。
[0066]
轨迹球例如包含球和能够旋转地支承该球的支承部。在将磁传感器系统100应用于轨迹球中的情况下,例如以伴随着球的旋转,磁场产生器101相对于磁传感器装置1的相对位置沿规定的球面变化的方式,在支承部的内部设置磁场产生器101,在球的内部设置磁传感器装置1。
[0067]
接着,参照图4至图7,对磁传感器装置1的结构进行说明。图4是示出磁传感器装置1的立体图。图5是示出磁传感器装置1的俯视图。图6是示出磁传感器装置1的侧面图。图7是示出磁传感器装置1的结构的功能框图。
[0068]
磁传感器装置1至少具备:1个磁传感器和支承至少1个磁传感器的支承体。至少1个磁传感器包含多个磁阻效应元件,并且以检测作为检测对象的磁场的对象磁场的方式构成。以下,将磁阻效应元件记作mr元件。
[0069]
在本实施方式中,至少1个磁传感器包含:第一磁传感器10、第二磁传感器20和第三磁传感器30。第一至第三磁传感器10、20、30各自包含多个mr元件。磁传感器装置1具备:包含第一磁传感器10的第一芯片2、以及包含第二磁传感器20和第三磁传感器30的第二芯片3。第一和第二芯片2、3均具有长方体形状。
[0070]
支承体4具有长方体形状。支承体4具有:作为上表面的基准平面4a、位于基准平面4a的相反侧的下表面4b、和连接基准平面4a与下表面4b的4个侧面。
[0071]
此处,参照图4至图6,对基准坐标系与磁传感器装置1的结构要素的关系进行说明。如上所述,在基准坐标系中,定义了x方向、y方向、z方向、-x方向、-y方向、-z方向。x方向和y方向是与支承体4的基准平面4a平行的方向。z方向是与支承体4的基准平面4a垂直的方向,并且是从支承体4的下表面4b朝向基准平面4a的方向。以下,将相对于基准的位置而处于z方向的前方的位置称为“上方”,将相对于基准的位置而处于“上方”的相反侧的位置称为“下方”。此外,关于磁传感器装置1的结构要素,将位于z方向端的面称为“上表面”,将位于-z方向端的面称为“下表面”。
[0072]
此外,将与基准平面4a垂直的方向(与z方向平行的方向)称为第一基准方向。此外,将与第一基准方向正交的2个方向称为第二基准方向和第三基准方向。在本实施方式中,将与y方向平行的方向作为第二基准方向。此外,将与x方向平行的方向作为第三基准方向。以下,对第一基准方向标注附图标记rz,对第二基准方向标注附图标记ry,对第三基准方向标注附图标记rx。
[0073]
第一芯片2具有:位于彼此相反侧的上表面2a和下表面2b、以及连接上表面2a和下表面2b的4个侧面。第二芯片3具有:位于彼此相反侧的上表面3a和下表面3b、以及连接上表面3a和下表面3b的4个侧面。
[0074]
第一芯片2以下表面2b与支承体4的基准平面4a相对的姿态,安装在基准平面4a上。第二芯片3以下表面3b与支承体4的基准平面4a相对的姿态,安装在基准平面4a上。第一芯片2与第二芯片3分别例如通过粘接剂6、7与支承体4接合。
[0075]
第一芯片2具有设置在上表面2a上的多个第一焊盘(pad)(电极焊盘)21。第二芯片3具有设置在上表面3a上的多个第二焊盘(电极焊盘)31。支承体4具有设置在基准平面4a上的多个第三焊盘(电极焊盘)41。虽然未图示,但是在磁传感器装置1中,多个第一焊盘21、多个第二焊盘31和多个第三焊盘41中的、对应的2个焊盘通过焊线(bonding wire)相互连接。
[0076]
支承体4包含:用于处理第一至第三磁传感器10、20、30生成的多个检测信号的处理器40。处理器40例如由专用集成电路(asic)构成。第一至第三磁传感器10、20、30与处理器40通过焊盘21、31、41和多个焊线连接。
[0077]
此处,将与基准平面4a垂直的方向的尺寸称为厚度。如图6所示,第一芯片2的厚度与第二芯片3的厚度相同。此外,支承体4的厚度大于第一芯片2的厚度和第二芯片3的厚度。
[0078]
接着,参照图8至图14,对第一至第三磁传感器10、20、30的结构进行说明。图8是示出第一磁传感器10的电路结构的电路图。图9是示出第二磁传感器20的电路结构的电路图。图10是示出第三磁传感器30的电路结构的电路图。图11是示出第一芯片2的一部分的俯视图。图12是示出第一芯片2的一部分的截面图。图13是示出第二芯片3的一部分的俯视图。图14是示出第二芯片3的一部分的截面图。
[0079]
此处,如以下那样定义第一方向、第二方向和第三方向。第一方向是与基准平面4a平行的方向。第二方向是分别相对于基准平面4a和第一基准方向rz倾斜的方向。第三方向是分别相对于基准平面4a和第一基准方向rz倾斜的另一方向。第二方向与第一方向正交。第三方向也与第一方向正交。
[0080]
此外,如图11和图13所示,如以下那样定义u方向和v方向。u方向是从x方向朝向-y
方向旋转的方向。v方向是从y方向朝向x方向旋转的方向。在本实施方式中,特别地,将u方向设为从x方向朝向-y方向旋转了α的方向,将v方向设为从y方向朝向x方向旋转了α的方向。另外,α是大于0
°
且小于90
°
的角度。此外,将与u方向相反的方向设为-u方向,将与v方向相反的方向为-v方向。
[0081]
此外,如图14所示,如以下那样定义w1方向和w2方向。w1方向是从v方向朝向-z方向旋转的方向。w2方向是从v方向朝向z方向旋转的方向。在本实施方式中,特别地,将w1方向设为从v方向朝向-z方向旋转了β的方向,将w2方向设为从v方向朝向z方向旋转了β的方向。另外,β是大于0
°
且小于90
°
的角度。此外,将与w1方向相反的方向设为-w1方向,将与w2方向相反的方向设为-w2方向。w1方向和w2方向分别与u方向正交。
[0082]
在本实施方式中,第一方向是与u方向平行的方向。第二方向是与w1方向平行的方向。第三方向是与w2方向平行的方向。
[0083]
第一磁传感器10,以检测对象磁场的第一分量,并且生成与第一分量具有对应关系的至少1个第一检测信号的方式构成。第一分量是对象磁场的第一方向(与u方向平行的方向)的分量。
[0084]
第二磁传感器20,以检测对象磁场的第二分量,并且生成与第二分量具有对应关系的至少1个第二检测信号的方式构成。第二分量是对象磁场的第二方向(与w1方向平行的方向)的分量。
[0085]
第三磁传感器30,以检测对象磁场的第三分量,并且生成与第三分量具有对应关系的至少1个第三检测信号的方式构成。第三分量是对象磁场的第三方向(与w2方向平行的方向)的分量。
[0086]
如图8所示,第一磁传感器10包含:电源端v1、接地端g1、信号输出端e11、e12、第一电阻部r11、第二电阻部r12、第三电阻部r13、以及第四电阻部r14。第一磁传感器10的多个mr元件构成第一至第四电阻部r11、r12、r13、r14。第一和第二电阻部r11、r12在将第一连接点p11与第二连接点p12电连接的路径即第一路径(图8中的左侧的路径)串联连接。第三和第四电阻部r13、r14在将第一连接点p11与第二连接点p12电连接的路径即第二路径(图8中的右侧的路径)串联连接。
[0087]
第一和第四电阻部r11、r14与第一连接点p11连接。第二和第三电阻部r12、r13与第二连接点p12连接。第一连接点p11与电源端v1连接。第二连接点p12与接地端g1连接。第一电阻部r11与第二电阻部r12的连接点与信号输出端e11连接。第三电阻部r13与第四电阻部r14的连接点与信号输出端e12连接。
[0088]
如图9所示,第二磁传感器20包含:电源端v2、接地端g2、信号输出端e21、e22、第一电阻部r21、第二电阻部r22、第三电阻部r23、以及第四电阻部r24。第二磁传感器20的多个mr元件构成第一至第四电阻部r21、r22、r23、r24。
[0089]
第二磁传感器20的电路结构基本上与第一磁传感器10的电路结构相同。如果将第一磁传感器10的电路结构的说明中的、电源端v1、接地端g1、信号输出端e11、e12、电阻部r11、r12、r13、r14以及连接点p11、p12分别置换成电源端v2、接地端g2、信号输出端e21、e22、电阻部r21、r22、r23、r24以及连接点p21、p22,则成为第二磁传感器20的电路结构的说明。
[0090]
如图10所示,第三磁传感器30包含:电源端v3、接地端g3、信号输出端e31、e32、第
一电阻部r31、第二电阻部r32、第三电阻部r33、以及第四电阻部r34。第三磁传感器30的多个mr元件构成第一至第四电阻部r31、r32、r33、r34。
[0091]
第三磁传感器30的电路结构基本上与第一磁传感器10的电路结构相同。如果将第一磁传感器10的电路结构的说明中的、电源端v1、接地端g1、信号输出端e11、e12、电阻部r11、r12、r13、r14以及连接点p11、p12分别置换成电源端v3、接地端g3、信号输出端e31、e32、电阻部r31、r32、r33、r34以及连接点p31、p32,则成为第三磁传感器30的电路结构的说明。
[0092]
以下,将第一磁传感器10的多个mr元件称为多个第一mr元件50a,将第二磁传感器20的多个mr元件称为多个第二mr元件50b,将第三磁传感器30的多个mr元件称为多个第三mr元件50c。此外,对任意的mr元件标注附图标记50。
[0093]
图15是示出mr元件50的立体图。mr元件50是自旋阀型的mr元件。mr元件50包含:具有方向固定的磁化的磁化固定层52、具有根据外部磁场的方向而方向能够变化的磁化的自由层54、和配置在磁化固定层52与自由层54之间的间隙层53。mr元件50也可以是tmr(隧道磁阻效应)元件,也可以是gmr(巨磁阻效应)元件。在tmr元件中,间隙层53为隧道势垒层。在gmr元件中,间隙层53为非磁性导电层。在mr元件50中,根据自由层54的磁化的方向相对于磁化固定层52的磁化的方向所成的角度,电阻值变化,在该角度为0
°
时,电阻值成为最小值,在角度为180
°
时,电阻值成为最大值。在各mr元件50中,自由层54具有易磁化轴方向成为与磁化固定层52的磁化的方向正交的方向的形状各向异性。另外,作为在自由层54设定规定的方向的易磁化轴的方法,能够使用对自由层54施加偏置磁场的磁铁。
[0094]
mr元件50还具有反铁磁性层51。反铁磁性层51、磁化固定层52、间隙层53和自由层54依次叠层。反铁磁性层51由反铁磁性材料构成,在与磁化固定层52之间产生交换耦合,固定磁化固定层52的磁化的方向。另外,磁化固定层52也可以为所谓的自扎钉型的固定层(synthetic ferri pinned层,sfp层)。自扎钉型的固定层具有层叠铁磁性层、非磁性中间层和铁磁性层的层叠铁结构,并且使2个铁磁性层反铁磁性地耦合。在磁化固定层52为自扎钉型的固定层的情况下,也可以省略反铁磁性层51。
[0095]
另外,mr元件50的层51~54的配置也可以与图15所示的配置上下相反。
[0096]
在图8至图10中,实心箭头表示mr元件50的磁化固定层52的磁化的方向。此外,空心箭头表示未对mr元件50施加对象磁场的情况下的、mr元件50的自由层54的磁化的方向。
[0097]
此处,如以下那样定义第一磁化方向、第二磁化方向、第三磁化方向和第四磁化方向。第一磁化方向是与第一基准方向rz交叉的一个方向。第二磁化方向是与第一基准方向rz交叉的一个方向且与第一磁化方向相反的一个方向。第三磁化方向是与第一基准方向rz交叉的一个方向且与第一磁化方向正交的一个方向。第四磁化方向是与第一基准方向rz交叉的一个方向且与第三磁化方向相反的一个方向。
[0098]
在本实施方式中,第一磁化方向与第二基准方向ry交叉。第一磁化方向相对于第二基准方向ry所成的角度也可以在大于0
°
且小于90
°
的范围内。
[0099]
在第一磁传感器10中,第一磁化方向为u方向,第二磁化方向为-u方向,第三磁化方向为v方向,第四磁化方向为-v方向。在图8所示的例子中,第一和第三电阻部r11、r13各自的磁化固定层52的磁化包含第一磁化方向(u方向)的分量。第二和第四电阻部r12、r14各自的磁化固定层52的磁化包含第二磁化方向(-u方向)的分量。
[0100]
第一至第四电阻部r11、r12、r13、r14中的2个电阻部各自的自由层54的磁化,在未对第一磁传感器10施加对象磁场的情况下,包含第三磁化方向(v方向)的分量。第一至第四电阻部r11、r12、r13、r14中的另2个电阻部各自的自由层54的磁化,在未对第一磁传感器10施加对象磁场的情况下,包含第四磁化方向(-v方向)的分量。在图8所示的例子中,第一和第二电阻部r11、r12各自的自由层54的磁化,在上述的情况下,包含第三磁化方向(v方向)的分量。第三和第四电阻部r13、r14各自的磁化固定层52的磁化,在上述的情况下,包含第四磁化方向(-v方向)的分量。
[0101]
另外,在磁化固定层52的磁化包含特定的磁化方向的分量的情况下,特定的磁化方向的分量也可以为磁化固定层52的磁化的主分量。或者,磁化固定层52的磁化也可以不包含与特定的磁化方向正交的方向的分量。在本实施方式中,在磁化固定层52的磁化包含特定的磁化方向的分量的情况下,磁化固定层52的磁化的方向成为特定的磁化方向或大致特定的磁化方向。
[0102]
同样地,在未对自由层54施加对象磁场的情况下的自由层54的磁化包含特定的磁化方向的分量的情况下,特定的磁化方向的分量也可以为自由层54的磁化的主分量。或者,上述的情况下的自由层54的磁化也可以不包含与特定的磁化方向正交的方向的分量。在本实施方式中,在上述的情况下的自由层54的磁化包含特定的磁化方向的分量的情况下,上述的情况下的自由层54的磁化的方向成为特定的磁化方向或大致特定的磁化方向。
[0103]
第一磁传感器10,以在未对第一磁传感器10施加对象磁场的情况下,自由层54的磁化成为上述的方向的方式构成。具体而言,第一磁传感器10的多个第一mr元件50a各自的自由层54具有易磁化轴方向成为与第三磁化方向(v方向)平行的方向的形状各向异性。另外,与第三磁化方向(v方向)平行的方向也是与第四磁化方向(-v方向)平行的方向。
[0104]
此外,第一磁传感器10包含:磁场产生器,其以对自由层54施加分别与第一至第四磁化方向交叉的方向的磁场的方式构成。在本实施方式中,磁场产生器包含线圈。关于线圈所产生的磁场的具体的方向,在之后进行说明。
[0105]
在第二磁传感器20中,第一磁化方向为w1方向,第二磁化方向为-w1方向,第三磁化方向为u方向,第四磁化方向为-u方向。如果将第一磁传感器10的磁化固定层52的磁化的方向和自由层54的磁化的方向的说明中的、第一磁传感器10、电阻部r11、r12、r13、r14、u方向、-u方向、v方向以及-v方向分别置换成第二磁传感器20、电阻部r21、r22、r23、r24、w1方向、-w1方向、u方向以及-u方向,则成为第二磁传感器20的磁化固定层52的磁化的方向和自由层54的磁化的方向的说明。
[0106]
在第三磁传感器30中,第一磁化方向为w2方向,第二磁化方向为-w2方向,第三磁化方向为u方向,第四磁化方向为-u方向。如果将第一磁传感器10的磁化固定层52的磁化的方向和自由层54的磁化的方向的说明中的、第一磁传感器10、电阻部r11、r12、r13、r14、u方向、-u方向、v方向以及-v方向分别置换成第三磁传感器30、电阻部r31、r32、r33、r34、w2方向、-w2方向、u方向以及-u方向,则成为第三磁传感器30的磁化固定层52的磁化的方向和自由层54的磁化的方向的说明。
[0107]
如图11和图12所示,第一芯片2包含:基板22、绝缘层23、24、25、26、27、28、65a、多个下部电极61a、多个上部电极62a、多个下部线圈要素63a、以及多个上部线圈要素64a。另外,线圈要素是线圈的绕组的一部分。绝缘层23配置在基板22之上。多个下部线圈要素63a
配置在绝缘层23之上。绝缘层65a在绝缘层23之上配置在多个下部线圈要素63a的周围。绝缘层24配置在多个下部线圈要素63a和绝缘层65a之上。多个下部电极61a配置在绝缘层24之上。绝缘层25在绝缘层24之上配置在多个下部电极61a的周围。
[0108]
多个第一mr元件50a配置在多个下部电极61a之上。绝缘层26在多个下部电极61a和绝缘层25之上配置在多个第一mr元件50a的周围。多个上部电极62a配置在多个第一mr元件50a和绝缘层26之上。绝缘层27在绝缘层26之上配置在多个上部电极62a的周围。绝缘层28配置在多个上部电极62a和绝缘层27之上。多个上部线圈要素64a配置在绝缘层28之上。第一芯片2也可以还包含覆盖多个上部线圈要素64a和绝缘层28的、未图示的绝缘层。另外,在图11中,省略多个下部电极61a、多个上部电极62a、多个下部线圈要素63a和绝缘层23~28、65a。
[0109]
在第一芯片2安装在支承体4的基准平面4a上的状态(参照图4至图6)下,基板22的上表面与基准平面4a平行。在上述的状态下,多个下部电极61a的各自的上表面也成为与基准平面4a平行。因此,在上述的状态下,可以说多个第一mr元件50a配置在与基准平面4a平行的平面之上。
[0110]
如图11所示,多个第一mr元件50a以在u方向与v方向分别排列多个的方式排列。多个上部线圈要素64a分别沿与y方向平行的方向延伸。此外,多个上部线圈要素64a以在x方向排列的方式排列。在从第一基准方向rz观察时,在多个第一mr元件50a中的各个,重叠有2个上部线圈要素64a。虽然未图示,但是多个下部线圈要素63a的形状和排列也可以与多个上部线圈要素64a的形状和排列相同,也可以不同。
[0111]
在图11和图12所示的例子中,多个下部线圈要素63a与多个上部线圈要素64a,以构成对多个第一mr元件50a的自由层54施加x方向的磁场和-x方向的磁场的线圈的方式电连接。此外,该线圈,以能够对第一和第二电阻部r11、r12各自的自由层54以及第三和第四电阻部r13、r14各自的自由层54中的、一个自由层54施加x方向的磁场,并且对另一个自由层54施加-x方向的磁场的方式构成。
[0112]
由该线圈产生的磁场且对自由层54施加的磁场的方向,与第一磁传感器10的第一至第四磁化方向(u方向、-u方向、v方向和-v方向)分别交叉。在图11和图12所示的例子中,特别地,对自由层54施加的磁场的方向,相对于与第一磁化方向(u方向)平行的方向和与第三磁化方向(v方向)平行的方向分别倾斜45
°
。
[0113]
各个下部电极61a具有细长的形状。在下部电极61a的长边方向上相邻的2个下部电极61a之间,形成有间隙。在下部电极61a的上表面上,在长边方向的两端的附近,分别配置有第一mr元件50a。此外,各个上部电极62a具有细长的形状,将相邻配置在下部电极61a的长边方向上相邻的2个下部电极61a上的2个第一mr元件50a彼此电连接。
[0114]
如图13和图14所示,第二芯片3包含:基板32、绝缘层33、34、35、36、37、38、39、65b、多个下部电极61b、多个下部电极61c、多个上部电极62b、多个上部电极62c、多个下部线圈要素63b、以及多个上部线圈要素64b。绝缘层33配置在基板32之上。多个下部线圈要素63b配置在绝缘层33之上。绝缘层65b在绝缘层33之上配置在多个下部线圈要素63b的周围。绝缘层34配置在多个下部线圈要素63b和绝缘层65b之上。绝缘层35配置在绝缘层34之上。多个下部电极61b和多个下部电极61c配置在绝缘层35之上。绝缘层36在绝缘层35之上配置在多个下部电极61b和多个下部电极61c的周围。
[0115]
多个第二mr元件50b配置在多个下部电极61b之上。多个第三mr元件50c配置在多个下部电极61c之上。绝缘层37在多个下部电极61b、多个下部电极61c和绝缘层36之上配置在多个第二mr元件50b和多个第三mr元件50c的周围。多个上部电极62b配置在多个第二mr元件50b和绝缘层37之上。多个上部电极62c配置在多个第三mr元件50c和绝缘层37之上。绝缘层38在绝缘层37之上配置在多个上部电极62b和多个上部电极62c的周围。绝缘层39配置在多个上部电极62b、多个上部电极62c和绝缘层38之上。多个上部线圈要素64b配置在绝缘层39之上。第二芯片3也可以还包含覆盖多个上部线圈要素64b和绝缘层39的、未图示的绝缘层。另外,在图13中,省略多个下部电极61b、多个下部电极61c、多个上部电极62b、多个上部电极62c、多个下部线圈要素63b和绝缘层33~39。
[0116]
在第二芯片3安装在支承体4的基准平面4a上的状态(参照图4至图6)下,基板32的上表面与基准平面4a平行。绝缘层35具有多个槽部35c。多个槽部35c分别具有相对于基板32的上表面倾斜的倾斜面35a和倾斜面35b。多个下部电极61b配置在多个槽部35c各自的倾斜面35a之上。多个下部电极61c配置在多个槽部35c各自的倾斜面35b之上。在上述的状态下,多个下部电极61b各自的上表面和多个下部电极61c各自的上表面,也相对于基准平面4a倾斜。因此,可以说,在上述的状态下,多个第二mr元件50b和多个第三mr元件50c配置在相对于基准平面4a倾斜的倾斜面上。
[0117]
如图13所示,多个第二mr元件50b以在u方向和v方向上分别排列多个的方式排列。同样地,多个第三mr元件50c以在u方向和v方向上分别排列多个的方式排列。在本实施方式中,多个第二mr元件50b与多个第三mr元件50c在v方向上交替地排列。
[0118]
多个上部线圈要素64b分别沿与y方向平行的方向延伸。此外,多个上部线圈要素64b以在x方向排列的方式排列。在从第一基准方向rz观察时,在多个第二mr元件50b和多个第三mr元件50c中的各个,重叠有2个上部线圈要素64b。虽然未图示,但是多个下部线圈要素63b的形状和排列也可以与多个上部线圈要素64b的形状和排列相同,也可以不同。
[0119]
在图13和图14所示的例子中,多个下部线圈要素63b与多个上部线圈要素64b,以构成对多个第二mr元件50b和多个第三mr元件50c各自的自由层54施加x方向的磁场和-x方向的磁场的线圈的方式电连接。此外,该线圈,以能够对第二磁传感器20的第一和第二电阻部r21、r22及第三磁传感器30的第一和第二电阻部r31、r32各自的自由层54、以及第二磁传感器20的第三和第四电阻部r23、r24及第三磁传感器30的第三和第四电阻部r33、r34各自的自由层54中的、一个自由层54施加x方向的磁场,并且对另一个自由层54施加-x方向的磁场的方式构成。
[0120]
由该线圈产生的磁场且对第二磁传感器20的自由层54施加的磁场的方向,与第二磁传感器20的第一至第四磁化方向(w1方向、-w1方向、u方向和-u方向)分别交叉。在图13和图14所示的例子中,特别地,对第二磁传感器20的自由层54施加的磁场的方向,相对于与第二磁传感器20的第一磁化方向(w1方向)平行的方向和与第三磁化方向(u方向)平行的方向分别倾斜45
°
。
[0121]
同样地,由该线圈产生的磁场且对第三磁传感器30的自由层54施加的磁场的方向,与第三磁传感器30的第一至第四磁化方向(w2方向、-w2方向、u方向和-u方向)分别交叉。在图13和图14所示的例子中,特别地,对第三磁传感器30的自由层54施加的磁场的方向,相对于与第三磁传感器30的第一磁化方向(w2方向)平行的方向和与第三磁化方向(u方
向)平行的方向分别倾斜45
°
。
[0122]
各个下部电极61b具有细长的形状。在下部电极61b的长边方向上相邻的2个下部电极61b之间,形成有间隙。在下部电极61b的上表面上,在长边方向的两端的附近,分别配置有第二mr元件50b。此外,各个上部电极62b具有细长的形状,将相邻配置在下部电极61b的长边方向上相邻的2个下部电极61b上的2个第二mr元件50b彼此电连接。
[0123]
各个下部电极61c具有细长的形状。在下部电极61c的长边方向上相邻的2个下部电极61c之间,形成有间隙。在下部电极61c的上表面上,在长边方向的两端的附近,分别配置有第三mr元件50c。此外,各个上部电极62c具有细长的形状,将相邻配置在下部电极61c的长边方向上相邻的2个下部电极61c上的2个第三mr元件50c彼此电连接。
[0124]
接着,参照图8至图10,对第一至第三检测信号进行说明。当对象磁场的第一方向(与u方向平行的方向)的分量即第一分量的强度变化时,第一磁传感器10的电阻部r11~r14各自的电阻值,以电阻部r11、r13的电阻值增加并且电阻部r12、r14的电阻值减少,或者电阻部r11、r13的电阻值减少并且电阻部r12、r14的电阻值增加的方式变化。由此,信号输出端e11、e12各自的电位变化。第一磁传感器10将与信号输出端e11的电位对应的信号作为第一检测信号s11而生成,并且将与信号输出端e12的电位对应的信号作为第一检测信号s12而生成。
[0125]
当对象磁场的第二方向(与w1方向平行的方向)的分量即第二分量的强度变化时,第二磁传感器20的电阻部r21~r24各自的电阻值,以电阻部r21、r23的电阻值增加并且电阻部r22、r24的电阻值减少,或者电阻部r21、r23的电阻值减少并且电阻部r22、r24的电阻值增加的方式变化。由此,信号输出端e21、e22各自的电位变化。第二磁传感器20将与信号输出端e21的电位对应的信号作为第二检测信号s21而生成,并且将与信号输出端e22的电位对应的信号作为第二检测信号s22而生成。
[0126]
当对象磁场的第三方向(与w2方向平行的方向)的分量即第三分量的强度变化时,第三磁传感器30的电阻部r31~r34各自的电阻值,以电阻部r31、r33的电阻值增加并且电阻部r32、r34的电阻值减少,或者电阻部r31、r33的电阻值减少并且电阻部r32、r34的电阻值增加的方式变化。由此,信号输出端e31、e32各自的电位变化。第三磁传感器30将与信号输出端e31的电位对应的信号作为第三检测信号s31而生成,并且将与信号输出端e32的电位对应的信号作为第三检测信号s32而生成。
[0127]
接着,对处理器说明40的动作进行说明。处理器40基于第一检测信号s11、s12,生成与对象磁场的第一分量(与u方向平行的方向的分量)对应的第一检测值su。在本实施方式中,处理器40通过包含求取第一检测信号s11与第一检测信号s12之差s11-s12的运算,生成第一检测值su。第一检测值su也可以为差s11-s12本身,也可以是对差s11-s12增加了增益(gain)调整和偏移(offset)调整等规定的修正的值。
[0128]
此外,处理器40基于第二检测信号s21、s22和第三检测信号s31、s32,生成第二检测值与第三检测值。第二检测值是对象磁场的、对应于与基准平面4a平行且与第一方向(与u方向平行的方向)正交的方向的分量的检测值。在本实施方式中,处理器40,作为第二检测值,生成对应于与对象磁场的v方向平行的方向的分量的检测值。此外,第三检测值是对象磁场的、对应于与基准平面4a垂直的方向的分量即与z方向平行的方向的分量的检测值。以下,以记号sv表示第二检测值,以记号sz表示第三检测值。
[0129]
处理器40例如如以下那样生成第二和第三检测值sv、sz。处理器40,首先,通过包含求取第二检测信号s21与第二检测信号s22之差s21-s22的运算来生成值s2,并且通过包含求取第三检测信号s31与第三检测信号s32之差s31-s32的运算来生成值s3。然后,处理器40使用下述的式(1)、(2),计算值s3、s4。s3=(s2+s1)/cosα
ꢀꢀꢀꢀꢀꢀꢀ
(1)s4=(s2-s1)/sinα
ꢀꢀꢀꢀꢀꢀ
(2)
[0130]
第二检测值sv也可以为值s3本身,也可以是对值s3增加了增益调整和偏移调整等规定的修正的值。同样地,第三检测值sz也可以为值s4本身,也可以是对值s4增加了增益调整和偏移调整等规定的修正的值。
[0131]
如上所述,u方向是从x方向朝向-y方向旋转了α的方向。因此,第一检测值su和与对象磁场的x方向平行的方向的分量也具有对应关系。此外,v方向是从y方向朝向x方向旋转了α的方向。因此,第二检测值sv和与对象磁场的y方向平行的方向的分量也具有对应关系。另外,处理器40也可以基于第一检测信号s11、s12或第一检测值su,生成对应于与对象磁场的x方向平行的方向的分量的检测值。同样地,处理器40也可以基于第二检测信号s21、s22和第三检测信号s31、s32或第二检测值sv,生成对应于与对象磁场的y方向平行的方向的分量的检测值。
[0132]
接着,参照图16,对磁传感器装置1的结构上的特征进行说明。图16是用于说明元件配置区域的配置的说明图。
[0133]
首先,对第一磁传感器10的特征进行说明。第一磁传感器10包含:用于配置多个第一mr元件50a的元件配置区域。以下,将用于配置多个第一mr元件50a的元件配置区域也记作第一磁传感器10的元件配置区域。在本实施方式中,第一磁传感器10包含于第一芯片2。因此,第一磁传感器10的元件配置区域也包含于第一芯片2。第一磁传感器10的元件配置区域也可以存在于第一芯片2的内部,也可以存在于第一芯片2的表面。在本实施方式中,第一芯片2的上表面2a的一部分或整体为第一磁传感器10的元件配置区域。以下,以第一芯片2的上表面2a的整体为第一磁传感器10的元件配置区域的情况为例进行说明。
[0134]
在图16中,标注附图标记c2的点表示从第一基准方向rz观察时的、第一芯片2的上表面2a即第一磁传感器10的元件配置区域的重心。此外,标注附图标记c4的点表示从第一基准方向rz观察时的、支承体4的基准平面4a的重心。如图16所示,在从第一基准方向rz观察时,第一磁传感器10的元件配置区域的重心c2从基准平面4a的重心c4偏离。在本实施方式中,第二基准方向ry上的、重心c2从重心c4的偏离大于第三基准方向rx上的、重心c2从重心c4的偏离。
[0135]
此外,在图16中,标注ra的直线表示通过重心c4并与第二基准方向ry平行的直线。以下,将该直线称为基准轴ra。在本实施方式中,重心c2在从第一基准方向rz观察时与基准轴ra重叠。
[0136]
第一磁传感器10的元件配置区域包含:第一区域a21、第二区域a22、第三区域a23和第四区域a24。第一区域a21是用于配置多个第一mr元件50a中的、构成第一电阻部r11的至少1个第一mr元件50a的区域。第二区域a22是用于配置多个第一mr元件50a中的、构成第二电阻部r12的至少1个第一mr元件50a的区域。第三区域a23是用于配置多个第一mr元件50a中的、构成第三电阻部r13的至少1个第一mr元件50a的区域。第四区域a24是用于配置多
个第一mr元件50a中的、构成第四电阻部r14的至少1个第一mr元件50a的区域。
[0137]
第一至第四区域a21、a22、a23、a24中的至少2个区域,以在从第一基准方向rz观察时至少2个区域各自的至少一部分夹着基准轴ra的方式,沿第三基准方向rx配置。在本实施方式中,第二区域a22与第四区域a24以在第一基准方向rz观察时夹着基准轴ra的方式,沿第三基准方向rx配置。第一区域a21在从第一基准方向rz观察时,配置在第二区域a22与第四区域a24之间。第三区域a23在从第一基准方向rz观察时,配置在第一区域a21与第二区域a22之间。在图16所示的例子中,第一区域a21与第三区域a23也以在从第一基准方向rz观察时夹着基准轴ra的方式,沿第三基准方向rx配置。
[0138]
在本实施方式中,第二区域a22与第四区域a24在从第一基准方向rz观察时,以基准轴ra为中心对称地配置。此外,第一区域a21与第三区域a23在从第一基准方向rz观察时,以基准轴ra为中心对称地配置。
[0139]
另外,在第一芯片2的上表面2a的整体为第一磁传感器10的元件配置区域的情况下,元件配置区域也可以包含用于配置多个第一焊盘21的区域。此外,在第一芯片2的上表面2a的一部分为第一磁传感器10的元件配置区域的情况下,元件配置区域也可以包含用于配置多个第一焊盘21的区域,也可以不包含。
[0140]
接着,对第二和第三磁传感器20、30的特征进行说明。第二磁传感器20包含:用于配置多个第二mr元件50b的元件配置区域。此外,第三磁传感器30包含:用于配置多个第三mr元件50c的元件配置区域。在本实施方式中,第二和第三磁传感器20、30包含于第二芯片3。因此,用于配置多个第二mr元件50b的元件配置区域和用于配置多个第三mr元件50c的元件配置区域也包含于第二芯片3。在本实施方式中,作为用于配置多个第二mr元件50b的元件配置区域和用于配置多个第三mr元件50c的元件配置区域,使用共同的元件配置区域。以下,将该共同的元件配置区域也记作第二和第三磁传感器20、30的元件配置区域。
[0141]
第二和第三磁传感器20、30的元件配置区域也可以存在于第二芯片3的内部,也可以存在于第二芯片3的表面。在本实施方式中,第二芯片3的上表面3a的一部分或整体为第二和第三磁传感器20、30的元件配置区域。以下,以第二芯片3的上表面3a的整体为第二和第三磁传感器20、30的元件配置区域的情况为例进行说明。
[0142]
在图16中,标注附图标记c3的点表示从第一基准方向rz观察时的、第二芯片3的上表面3a即第二和第三磁传感器20、30的元件配置区域的重心。如图16所示,在从第一基准方向rz观察时,第二和第三磁传感器20、30的元件配置区域的重心c3从基准平面4a的重心c4偏离。在本实施方式中,第二基准方向ry上的、重心c3从重心c4的偏离大于第三基准方向rx上的、重心c3从重心c4的偏离。此外,在本实施方式中,重心c3在从第一基准方向rz观察时与基准轴ra重叠。
[0143]
用于配置多个第二mr元件50b的元件配置区域包含:第一区域、第二区域、第三区域和第四区域。第一区域是用于配置多个第二mr元件50b中的、构成第一电阻部r21的至少1个第二mr元件50b的区域。第二区域是用于配置多个第二mr元件50b中的、构成第二电阻部r22的至少1个第二mr元件50b的区域。第三区域是用于配置多个第二mr元件50b中的、构成第三电阻部r23的至少1个第二mr元件50b的区域。第四区域是用于配置多个第二mr元件50b中的、构成第四电阻部r24的至少1个第二mr元件50b的区域。
[0144]
用于配置多个第三mr元件50c的元件配置区域包含:第一区域、第二区域、第三区
域和第四区域。第一区域是用于配置多个第三mr元件50c中的、构成第一电阻部r31的至少1个第三mr元件50c的区域。第二区域是用于配置多个第三mr元件50c中的、构成第二电阻部r32的至少1个第三mr元件50c的区域。第三区域是用于配置多个第三mr元件50c中的、构成第三电阻部r33的至少1个第三mr元件50c的区域。第四区域是用于配置多个第三mr元件50c中的、构成第四电阻部r34的至少1个第三mr元件50c的区域。
[0145]
在本实施方式中,作为用于配置多个第二mr元件50b的元件配置区域的第一区域和用于配置多个第三mr元件50c的元件配置区域的第一区域,使用共同的区域。以下,将该共同的区域记作第一区域a31。
[0146]
同样地,在本实施方式中,作为用于配置多个第二mr元件50b的元件配置区域的第二区域和用于配置多个第三mr元件50c的元件配置区域的第二区域,使用共同的区域。以下,将该共同的区域记作第二区域a32。
[0147]
同样地,在本实施方式中,作为用于配置多个第二mr元件50b的元件配置区域的第三区域和用于配置多个第三mr元件50c的元件配置区域的第三区域,使用共同的区域。以下,将该共同的区域记作第三区域a33。
[0148]
同样地,在本实施方式中,作为用于配置多个第二mr元件50b的元件配置区域的第四区域和用于配置多个第三mr元件50c的元件配置区域的第四区域,使用共同的区域。以下,将该共同的区域记作第四区域a34。
[0149]
第一至第四区域a31、a32、a33、a34的位置关系与第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的位置关系相同。如果将第一至第四区域a21、a22、a23、a24的位置关系的说明中的第一至第四区域a21、a22、a23、a24分别置换成第一至第四区域a31、a32、a33、a34,则成为第一至第四区域a31、a32、a33、a34的位置关系的说明。
[0150]
另外,在第二芯片3的上表面3a的整体为第二和第三磁传感器20、30的元件配置区域的情况下,元件配置区域也可以包含用于配置多个第二焊盘31的区域。此外,在第二芯片3的上表面3a的一部分为第二和第三磁传感器20、30的元件配置区域的情况下,元件配置区域也可以包含用于配置多个第二焊盘31的区域,也可以不包含。
[0151]
接着,对本实施方式所涉及的磁传感器装置1的作用和效果进行说明。在因外力或温度而在支承体4内产生了应力的情况下,支承体4内的应力分布成为以基准平面4a的重心c4为中心而对称。图17是示意地示出支承体4内的应力分布的说明图。在图17中,以等高线示出应力分布。
[0152]
当对mr元件50施加有应力时,有时mr元件50的磁化固定层52的磁化的方向从设计时的方向偏离。例如,在对mr元件50、在与磁化固定层52的磁化的方向交叉的方向上施加有拉伸应力的情况下,磁化固定层52的磁化的方向朝向拉伸应力的方向稍微变化。其结果是,未对mr元件50施加对象磁场的情况下的mr元件50的电阻值变化。
[0153]
此处,施加于各个mr元件50的应力对检测值赋予的影响以第一磁传感器10为例来进行考虑。假设在第一电阻部r11与第二电阻部r12之间,在对各个第一mr元件50a施加的应力的大小不同的情况下,因应力而引起的第一电阻部r11的电阻值的变化量与因应力引起的第二电阻部r12的电阻值的变化量相互不同。其结果是,在第一检测信号s11产生偏移(offset)。
[0154]
同样地,在第三电阻部r13与第四电阻部r14之间,在对各个第一mr元件50a施加的
应力的大小不同的情况下,因应力而引起的第三电阻部r13的电阻值的变化量与因应力引起的第四电阻部r14的电阻值的变化量相互不同。其结果是,在第一检测信号s12偏移。第一检测信号s11、s12的偏移成为第一检测值su的偏移的原因。
[0155]
为了在第一电阻部r11与第二电阻部r12之间,使对各个第一mr元件50a施加的应力的大小相等,并且在第三电阻部r13与第四电阻部r14之间,使对各个第一mr元件50a施加的应力的大小相等,考虑以第一芯片2的平面形状的重心与基准平面4a的重心c4重合的方式,将第一芯片2搭载于支承体4。但是,在这样的情况下,由于第一芯片2的大小与第二芯片3的大小,无法将第二芯片3搭载于支承体4。
[0156]
与此相对,在本实施方式中,将第一芯片2从基准平面4a的重心c4偏离,并且如上述那样分别规定第一至第四电阻部r11、r12、r13、r14各自的磁化固定层52的磁化的方向、第一至第四电阻部r11、r12、r13、r14各自的自由层54的磁化的方向和第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的配置。由此,根据本实施方式,能够抑制第一检测值su的偏移。
[0157]
以下,对能够抑制第一检测值su的偏移的理由进行详细说明。另外,在以下的说明中,仅言及电阻值时,是指未对第一磁传感器10施加对象磁场的情况下的电阻值。首先,说明对第一磁传感器10施加有第二基准方向ry的应力的情况。此处,以r1表示第一电阻部r11的电阻值,以r2表示第二电阻部r12的电阻值,以r3表示第三电阻部r13的电阻值,以r4表示第四电阻部r14的电阻值。另外,未对第一磁传感器10施加应力的情况下的r1、r2、r3、r4,彼此相等。
[0158]
第一检测值su取决于第一检测信号s11与第一检测信号s12的差s11-s12。差s11-s12取决于信号输出端e11、e12的电位差e。电位差e以下述的式(3)表示。另外,在式(3)中,v表示施加于电源端v1的电压。e=v
·
(r2
·
r4-r1
·
r3)/{(r1+r2)(r3+r4)}
ꢀꢀꢀꢀꢀ
(3)
[0159]
在对第一磁传感器10施加有第二基准方向ry的应力的情况下,r1、r4增加r2、r3减少,或者r1、r4减少r2、r3增加。此外,第一至第四区域a21、a22、a23、a24各自的应力分布变得彼此大致相等。当将上述的r1、r2、r3、r4的变化的方式应用于式(3)时,理想地,电位差e几乎不变化。因此,即使对第一磁传感器10施加有第二基准方向ry的应力,第一检测值su的偏移也几乎不会发生。
[0160]
接着,说明对第一磁传感器10施加有第三基准方向rx的应力的情况。对第一磁传感器10施加有第三基准方向rx的应力的情况下的r1、r2、r3、r4的增减的方式与对第一磁传感器10施加有第二基准方向ry的应力的情况相同。此外,施加于第一和第三区域a21、a23的应力变得大于施加于第二和第四区域a22、a24的应力。因此,因应力而引起的r1、r3的变化量变得大于因应力而引起的r2、r4的变化量。当将上述的r1、r2、r3、r4的变化的方式应用于式(3)时,理想地,电位差e几乎不变化。因此,即使对第一磁传感器10施加有第三基准方向rx的应力,第一检测值su的偏移也几乎不会发生。
[0161]
通过以上的说明,根据本实施方式,能够抑制第一检测值su的偏移。
[0162]
另外,为了获得上述的效果,第一至第四电阻部r11、r12、r13、r14各自的自由层54的磁化的方向需要如上述那样规定。但是,有时因外部磁场而导致自由层54的磁化的方向成为设计时的方向的相反的方向。在本实施方式中,第一磁传感器10包含:线圈,其以对第
一和第二电阻部r11、r12各自的自由层54及第三和第四电阻部r13、r14各自的自由层54中的、一个自由层54施加x方向的磁场,并且对另一个自由层54施加-x方向的磁场的方式构成。由此,根据本实施方式,能够使自由层54的磁化的方向与设计时的方向一致。
[0163]
至此,对施加于各个mr元件50的应力的影响以第一磁传感器10为例进行了说明。上述的说明也适用于第二和第三磁传感器20、30。根据本实施方式,能够抑制第二检测值sv的偏移和第三检测值sz的偏移。
[0164]
接着,对本实施方式所涉及的磁传感器装置1的制造方法进行简单地说明。磁传感器装置1的制造方法包含:形成第一芯片2的工序、形成第二芯片3的工序、以及将第一和第二芯片2、3搭载于支承体4的工序。
[0165]
形成第一芯片2的工序包含形成第一磁传感器10的工序。形成第二芯片3的工序包含形成第二和第三磁传感器20、30的工序。形成第一磁传感器10的工序与形成第二和第三磁传感器20、30的工序分别包含形成多个mr元件50的工序。
[0166]
在形成多个mr元件50的工序中,首先,形成之后成为多个mr元件50的多个初始mr元件。多个初始mr元件分别包含:之后成为磁化固定层52的初始磁化固定层、自由层54、间隙层53和反铁磁性层51。
[0167]
接着,使用激光和规定的方向的外部磁场,将初始磁化固定层的磁化的方向固定在上述的规定的方向。例如在之后成为构成第一磁传感器10的第一和第三电阻部r11、r13的多个mr元件50的多个初始mr元件,施加第一磁化方向(u方向)的外部磁场,并且对多个初始mr元件照射激光。当激光的照射完成时,初始磁化固定层的磁化的方向固定在第一磁化方向。由此,初始磁化固定层成为磁化固定层52,初始mr元件成为mr元件50。此外,在之后成为构成第一磁传感器10的第二和第四电阻部r12、r14的多个mr元件50的多个初始mr元件,通过将外部磁场的方向设为第二磁化方向(-u方向),能够将多个初始mr元件各自的初始磁化固定层的磁化的方向固定在第二磁化方向。这样,形成多个mr元件50。[变形例]
[0168]
接着,参照图18,对本实施方式的变形例进行说明。图18是示出变形例的mr元件50的立体图。在变形例中,第一至第三磁传感器10、20、30分别代替包含线圈的磁场产生器而包含包括多个磁铁对的磁场产生器75。磁场产生器75以对自由层54施加第三磁化方向的磁场或第四磁化方向的磁场的方式构成。
[0169]
多个磁铁对分别包含2个磁铁75a、75b。磁铁75a配置在mr元件50的长边方向的一个端部的附近。磁铁75b配置在mr元件50的长边方向的另一个端部的附近。磁铁75a、75b的磁化包含第三磁化方向的分量或第四磁化方向的分量。磁铁75a、75b的磁化包含第三磁化方向的分量还是第四磁化方向的分量,根据被该磁铁75a、75b施加磁场的自由层54的、未施加对象磁场的情况下的磁化的方向来选择。
[0170]
另外,在磁铁75a、75b的磁化包含特定的磁化方向的分量的情况下,特定的磁化方向的分量也可以为磁铁75a、75b的磁化的主分量。或者,磁铁75a、75b的磁化也可以不包含与特定的磁化方向正交的方向的分量。在变形例中,在磁铁75a、75b的磁化包含特定的磁化方向的分量的情况下,磁铁75a、75b的磁化的方向成为特定的磁化方向或大致特定的磁化方向。
[0171]
根据变形例,能够通过磁场产生器75,来防止因外部磁场而导致自由层54的磁化
的方向成为设计时的方向的相反的方向。[第二实施方式]
[0172]
接着,对本发明的第二实施方式进行说明。在第二实施方式中,mr元件50的自由层54的磁化的方向与第一实施方式不同。以下,参照图19至图21,对自由层54的磁化的方向进行说明。图19是示出第一磁传感器10的电路结构的电路图。图20是示出第二磁传感器20的电路结构的电路图。图21是示出第三磁传感器30的电路结构的电路图。
[0173]
在图19中,以空心箭头表示未对第一磁传感器10施加对象磁场的情况下的、第一磁传感器10的第一至第四电阻部r11、r12、r13、r14各自的自由层54的磁化的方向。如图19所示,第一磁传感器10的第一和第四电阻部r11、r14各自的自由层54的磁化,在上述情况下,包含第三磁化方向(v方向)的分量。第一磁传感器10的第二和第三电阻部r12、r13各自的自由层54的磁化,在上述情况下,包含第四磁化方向(-v方向)的分量。
[0174]
在图20中,以空心箭头示出未对第二磁传感器20施加对象磁场的情况下的、第二磁传感器20的第一至第四电阻部r21、r22、r23、r24各自的自由层54的磁化的方向。如果将第一磁传感器10的自由层54的磁化的方向的说明中的、第一磁传感器10、电阻部r11、r12、r13、r14、v方向以及-v方向,分别置换成第二磁传感器20、电阻部r21、r22、r23、r24、u方向以及-u方向,则成为第二磁传感器20的自由层54的磁化的方向的说明。
[0175]
在图21中,以空心箭头示出未对第三磁传感器30施加对象磁场的情况下的、第三磁传感器30的第一至第四电阻部r31、r32、r33、r34各自的自由层54的磁化的方向。如果将第一磁传感器10的自由层54的磁化的方向的说明中的、第一磁传感器10、电阻部r11、r12、r13、r14、v方向以及-v方向,分别置换成第三磁传感器30、电阻部r31、r32、r33、r34、u方向以及-u方向,则成为第三磁传感器30的自由层54的磁化的方向的说明。
[0176]
此外,在本实施方式中,由第一实施方式中的图11和图12所示的多个下部线圈要素63a和多个上部线圈要素64a构成的线圈的结构,与第一实施方式不同。在本实施方式中,该线圈,以对第一和第四电阻部r11、r14各自的自由层54以及第二和第三电阻部r12、r13各自的自由层54中的、一个自由层54施加x方向的磁场,并且对另一个自由层54施加-x方向的磁场的方式构成。
[0177]
此外,在本实施方式中,由第一实施方式中的图13和图14所示的多个下部线圈要素63b和多个上部线圈要素64b构成的线圈的结构,与第一实施方式不同。在本实施方式中,该线圈,以对第二磁传感器20的第一和第四电阻部r21、r24及第三磁传感器30的第一和第四电阻部r31、r34各自的自由层54,以及第二磁传感器20的第二和第三电阻部r22、r23及第三磁传感器30的第二和第三电阻部r32、r33各自的自由层54中的、一个自由层54施加x方向的磁场,并且对另一个自由层54施加-x方向的磁场的方式构成。
[0178]
接着,对本实施方式所涉及的磁传感器装置1的作用和效果进行说明。在本实施方式中,如上述那样规定第一至第四电阻部r11、r12、r13、r14各自的自由层54的磁化的方向。此外,在本实施方式中,将第一至第四电阻部r11、r12、r13、r14各自的磁化固定层52的磁化的方向和第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的配置如在第一实施方式中说明的那样规定(参照图16)。由此,根据本实施方式,能够抑制第一检测值su的偏移。
[0179]
以下,对能够抑制第一检测值su的偏移的理由进行详细说明。首先,说明对第一磁
传感器10施加有第二基准方向ry的应力的情况。此处,与第一实施方式同样地,以r1表示第一电阻部r11的电阻值,以r2表示第二电阻部r12的电阻值,以r3表示第三电阻部r13的电阻值,以r4表示第四电阻部r14的电阻值。在对第一磁传感器10施加有第二基准方向ry的应力的情况下,r1、r2增加r3、r4减少,或者r1、r2减少r3、r4增加。此外,与第一实施方式同样地,因应力产生的r1、r2、r3、r4各自的变化量变得彼此大致相等。当将上述的r1、r2、r3、r4的变化的方式应用于第一实施方式中的式(3)时,理想地,电位差e几乎不变化。因此,即使对第一磁传感器10施加有第二基准方向ry的应力,第一检测值su的偏移也几乎不会发生。
[0180]
接着,说明对第一磁传感器10施加有第三基准方向rx的应力的情况。对第一磁传感器10施加有第三基准方向rx的应力的情况下的r1、r2、r3、r4的增减的方式与对第一磁传感器10施加有第二基准方向ry的应力的情况相同。此外,与第一实施方式同样地,因应力引起的r1、r3的变化量变得大于因应力引起的r2、r4的变化量。当将上述的r1、r2、r3、r4的变化的方式应用于第一实施方式中的式(3)时,理想地,电位差e几乎不变化。因此,即使对第一磁传感器10施加有第三基准方向rx的应力,第一检测值su的偏移也几乎不会发生。
[0181]
通过以上的说明,根据本实施方式,能够抑制第一检测值su的偏移。
[0182]
至此,以第一磁传感器10为例进行了说明。上述的说明也适用于第二和第三磁传感器20、30。根据本实施方式,能够抑制第二检测值sv的偏移和第三检测值sz的偏移。
[0183]
本实施方式的其它的结构、作用和效果与第一实施方式相同。[第三实施方式]
[0184]
接着,对本发明的第三实施方式进行说明。在第三实施方式中,第一磁传感器10的元件配置区域的配置以及第二和第三磁传感器20、30的元件配置区域的配置与第一实施方式不同。以下,参照图22,对元件配置区域的配置进行说明。图22是用于说明元件配置区域的配置的说明图。
[0185]
首先,对第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的配置进行说明。在本实施方式中,第二区域a22与第三区域a23以在从第一基准方向rz观察时夹着基准轴ra的方式,沿第三基准方向rx配置。第一区域a21在从第一基准方向rz观察时,配置在第二区域a22与第三区域a23之间。第四区域a24在从第一基准方向rz观察时,配置在第一区域a21与第三区域a23之间。在图22所示的例子中,第一区域a21与第四区域a24也以在从第一基准方向rz观察时夹着基准轴ra的方式,沿第三基准方向rx配置。
[0186]
在本实施方式中,第二区域a22与第三区域a23在从第一基准方向rz观察时,以基准轴ra为中心对称地配置。此外,第一区域a21与第四区域a24在从第一基准方向rz观察时,以基准轴ra为中心对称地配置。
[0187]
接着,对第二和第三磁传感器20、30的元件配置区域的第一至第四区域a31、a32、a33、a34的配置进行说明。第一至第四区域a31、a32、a33、a34的位置关系与第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的位置关系相同。如果将第一至第四区域a21、a22、a23、a24的位置关系的说明中的、第一至第四区域a21、a22、a23、a24分别置换成第一至第四区域a31、a32、a33、a34,则成为第一至第四区域a31、a32、a33、a34的位置关系的说明。
[0188]
接着,对本实施方式所涉及的磁传感器装置1的作用和效果进行说明。在本实施方式中,如上述那样规定第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、
a24的配置。此外,在本实施方式中,将第一磁传感器10的第一至第四电阻部r11、r12、r13、r14各自的磁化固定层52的磁化的方向和第一至第四电阻部r11、r12、r13、r14各自的自由层54的磁化的方向如第一实施方式中说明的那样规定(参照图8)。由此,根据本实施方式,能够抑制第一检测值su的偏移。
[0189]
以下,对能够抑制第一检测值su的偏移的理由进行详细说明。首先,说明对第一磁传感器10施加有第二基准方向ry的应力的情况。此处,与第一实施方式同样地,以r1表示第一电阻部r11的电阻值,以r2表示第二电阻部r12的电阻值,以r3表示第三电阻部r13的电阻值,以r4表示第四电阻部r14的电阻值。与第一实施方式同样地,在对第一磁传感器10施加有第二基准方向ry的应力的情况下,r1、r4增加r2、r3减少,或者r1、r4减少r2、r3增加。此外,第一至第四区域a21、a22、a23、a24各自的应力分布变得彼此大致相等。因此,因应力引起的r1、r2、r3、r4各自的变化量变得彼此大致相等。上述的r1、r2、r3、r4的变化的方式与第一实施方式中的对第一磁传感器10施加有第二基准方向ry的应力的情况下的r1、r2、r3、r4的变化的方式相同。因此,根据与第一实施方式中说明的理由相同的理由,即使对第一磁传感器10施加有第二基准方向ry的应力,第一检测值su的偏移也几乎不会发生。
[0190]
接着,说明对第一磁传感器10施加有第三基准方向rx的应力的情况。对第一磁传感器10施加有第三基准方向rx的应力的情况下的r1、r2、r3、r4的增减的方式与对第一磁传感器10施加有第二基准方向ry的应力的情况相同。此外,对第一和第四区域a21、a24施加的应力变得大于对第二和第三区域a22、a23施加的应力。因此,因应力引起的r1、r4的变化量变得大于因应力引起的r2、r3的变化量。当将上述的r1、r2、r3、r4的变化的方式应用于第一实施方式中的式(3)时,理想地,电位差e几乎不变化。因此,即使对第一磁传感器10施加有第三基准方向rx的应力,第一检测值su的偏移也几乎不会发生。
[0191]
通过以上说明,根据本实施方式,能够抑制第一检测值su的偏移。
[0192]
至此,以第一磁传感器10为例进行了说明。上述的说明也适用于第二和第三磁传感器20、30。根据本实施方式,能够抑制第二检测值sv的偏移和第三检测值sz的偏移。
[0193]
本实施方式的其它的结构、作用和效果与第一实施方式相同。[第四实施方式]
[0194]
接着,对本发明的第四实施方式进行说明。在第四实施方式中,第一磁传感器10的元件配置区域的配置以及第二和第三磁传感器20、30的元件配置区域的配置与第一实施方式不同。以下,参照图23,对元件配置区域的配置进行说明。图23是用于说明元件配置区域的配置的说明图。
[0195]
首先,对第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的配置进行说明。在本实施方式中,第一区域a21与第四区域a24以在从第一基准方向rz观察时第一和第四区域a21、a24各自的至少一部分夹着基准轴ra的方式,沿第三基准方向rx配置。第二区域a22与第三区域a23以在从第一基准方向rz观察时第二和第三区域a22、a23各自的至少一部分夹着基准轴ra的方式,沿第三基准方向rx配置。第二区域a22与第三区域a23分别相对于第一区域a21与第四区域a24,配置在y方向的前方。
[0196]
在本实施方式中,特别地,第一区域a21与第四区域a24在从第一基准方向rz观察时,以基准轴ra为中心对称地配置。第二区域a22与第三区域a23在从第一基准方向rz观察时,以基准轴ra为中心对称地配置。此外,第一区域a21与第二区域a22在从第一基准方向rz
观察时,以与基准轴ra正交的假想的直线l1为中心对称地配置。第三区域a23与第四区域a24在从第一基准方向rz观察时,以假想的直线l1为中心对称地配置。
[0197]
接着,对第二和第三磁传感器20、30的元件配置区域的第一至第四区域a31、a32、a33、a34的配置进行说明。第一至第四区域a31、a32、a33、a34的位置关系,除第二和第三区域a32、a33相对于第一和第四区域a31、a34的配置以外,与第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的位置关系相同。如果将第一至第四区域a21、a22、a23、a24的位置关系的说明中的、第一至第四区域a21、a22、a23、a24分别置换成第一至第四区域a31、a32、a33、a34,则成为相对于第一和第四区域a31、a34的第二和第三区域a32、a33的配置以外的第一至第四区域a31、a32、a33、a34的位置关系的说明。
[0198]
第二区域a32与第三区域a33分别相对于第一区域a31与第四区域a34,配置在-y方向的前方。此外,第一区域a31与第二区域a32在从第一基准方向rz观察时,以与基准轴ra正交的假想的直线l2为中心对称地配置。第三区域a33与第四区域a34在从第一基准方向rz观察时,以假想的直线l2为中心对称地配置。
[0199]
接着,对本实施方式所涉及的磁传感器装置1的作用和效果进行说明。在本实施方式中,如上述那样规定第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的配置。此外,在本实施方式中,将第一磁传感器10的第一至第四电阻部r11、r12、r13、r14各自的磁化固定层52的磁化的方向和第一至第四电阻部r11、r12、r13、r14各自的自由层54的磁化的方向如在第一实施方式中说明的那样规定(参照图8)。由此,根据本实施方式,能够抑制第一检测值su的偏移。
[0200]
以下,对能够抑制第一检测值su的偏移的理由进行详细说明。首先,说明对第一磁传感器10施加有第二基准方向ry的应力的情况。此处,与第一实施方式同样地,以r1表示第一电阻部r11的电阻值,以r2表示第二电阻部r12的电阻值,以r3表示第三电阻部r13的电阻值,以r4表示第四电阻部r14的电阻值。在对第一磁传感器10施加有第二基准方向ry的应力的情况下,r1、r4增加r2、r3减少,或者r1、r4减少r2、r3增加。此外,对第一和第四区域a21、a24施加的应力变得大于对第二和第三区域a22、a23施加的应力。因此,因应力引起的r1、r4的变化量变得大于因应力引起的r2、r3的变化量。上述的r1、r2、r3、r4的变化的方式与对第一实施方式中的第一磁传感器10施加有第三基准方向rx的应力的情况下的r1、r2、r3、r4的变化的方式相同。因此,根据与第一实施方式中说明的理由相同的理由,即使对第一磁传感器10施加有第二基准方向ry的应力,第一检测值su的偏移也几乎不会发生。
[0201]
接着,说明对第一磁传感器10施加有第三基准方向rx的应力的情况。对第一磁传感器10施加有第三基准方向rx的应力的情况下的r1、r2、r3、r4的增减的方式与对第一磁传感器10施加有第二基准方向ry的应力的情况相同。此外,第一至第四区域a21、a22、a23、a24各自的应力分布变得彼此大致相等。因此,因应力引起的r1、r2、r3、r4各自的变化量变得彼此大致相等。上述的r1、r2、r3、r4的变化的方式,与第一实施方式中的对第一磁传感器10施加有第二基准方向ry的应力的情况下的r1、r2、r3、r4的变化的方式相同。因此,根据与第一实施方式中说明的理由相同的理由,即使对第一磁传感器10施加有第三基准方向rx的应力,第一检测值su的偏移也几乎不会发生。
[0202]
通过以上的说明,根据本实施方式,能够抑制第一检测值su的偏移。
[0203]
至此,以第一磁传感器10为例进行了说明。上述的说明也适用于第二和第三磁传
感器20、30。根据本实施方式,能够抑制第二检测值sv的偏移和第三检测值sz的偏移。
[0204]
本实施方式的其它的结构、作用和效果与第一实施方式相同。[第五实施方式]
[0205]
接着,对本发明的第五实施方式进行说明。在第五实施方式中,第一磁传感器10的元件配置区域的配置以及第二和第三磁传感器20、30的元件配置区域的配置与第四实施方式不同。以下,参照图24,对元件配置区域的配置进行说明。图24是用于说明元件配置区域的配置的说明图。
[0206]
首先,对第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的配置进行说明。第一至第四区域a21、a22、a23、a24的配置,除第二和第三区域a22、a23相对于第一和第四区域a21、a24的配置以外与第四实施方式相同。在本实施方式中,第二区域a22与第三区域a23分别相对于第一区域a21与第四区域a24配置在-y方向的前方。
[0207]
接着,对第二和第三磁传感器20、30的元件配置区域的第一至第四区域a31、a32、a33、a34的配置进行说明。第一至第四区域a31、a32、a33、a34的配置,除第二和第三区域a32、a33相对于第一和第四区域a31、a34的配置以外,与第四实施方式相同。在本实施方式中,第二区域a32与第三区域a33分别相对于第一区域a31与第四区域a34配置在y方向的前方。
[0208]
接着,对本实施方式所涉及的磁传感器装置1的作用和效果进行说明。在本实施方式中,如上述那样规定第一磁传感器10的元件配置区域的第一至第四区域a21、a22、a23、a24的配置。此外,在本实施方式中,将第一磁传感器10的第一至第四电阻部r11、r12、r13、r14各自的磁化固定层52的磁化的方向和第一至第四电阻部r11、r12、r13、r14各自的自由层54的磁化的方向如在第一实施方式中说明的那样规定(参照图8)。由此,根据本实施方式,能够抑制第一检测值su的偏移。
[0209]
以下,对能够抑制第一检测值su的偏移的理由进行详细说明。首先,说明对第一磁传感器10施加有第二基准方向ry的应力的情况。此处,与第四实施方式(第一实施方式)同样地,以r1表示第一电阻部r11的电阻值,以r2表示第二电阻部r12的电阻值,以r3表示第三电阻部r13的电阻值,以r4表示第四电阻部r14的电阻值。与第四实施方式同样地,在对第一磁传感器10施加有第二基准方向ry的应力的情况下,r1、r4增加r2、r3减少,或者r1、r4减少r2、r3增加。此外,对第一和第四区域a21、a24施加的应力变得小于对第二和第三区域a22、a23施加的应力。因此,因应力引起的r1、r4的变化量变得小于因应力的r2、r3引起的变化量。当将上述的r1、r2、r3、r4的变化的方式应用于第一实施方式中的式(3)时,理想地,电位差e几乎不变化。因此,即使对第一磁传感器10施加有第三基准方向rx的应力,第一检测值su的偏移也几乎不会发生。
[0210]
接着,说明对第一磁传感器10施加有第三基准方向rx的应力的情况。对第一磁传感器10施加有第三基准方向rx的应力的情况下的r1、r2、r3、r4的增减的方式与对第一磁传感器10施加有第二基准方向ry的应力的情况相同。此外,与第四实施方式同样地,因应力引起的r1、r2、r3、r4各自的变化量变得彼此大致相等。上述的r1、r2、r3、r4的变化的方式,与第四实施方式中的对第一磁传感器10施加有第三基准方向rx的应力的情况下的r1、r2、r3、r4的变化的方式相同。因此,根据与第四实施方式中说明的理由相同的理由,即使对第一磁传感器10施加有第三基准方向rx的应力,第一检测值su的偏移也几乎不会发生。
[0211]
通过以上的说明,根据本实施方式,能够抑制第一检测值su的偏移。
[0212]
至此,以第一磁传感器10为例进行了说明。上述的说明也适用于第二和第三磁传感器20、30。根据本实施方式,能够抑制第二检测值sv的偏移和第三检测值sz的偏移。
[0213]
本实施方式的其它的结构、作用和效果与第四实施方式相同。
[0214]
另外,本发明并不限定于上述各实施方式,能够进行各种变更。例如,本发明的磁传感器装置和磁传感器系统并不限定于检测磁场产生器相对于磁传感器装置的相对位置的情况,也能够应用于检测在规定的磁场中构成为可旋转的磁传感器装置的姿态的情况。
[0215]
此外,第二磁传感器20的多个第二mr元件50b和第三磁传感器30的多个第三mr元件50c并不限定于形成于多个槽部35c各自的倾斜面35a、35b,也可以形成于从绝缘层35的上表面向z方向突出的多个突出部的倾斜面。
[0216]
此外,也可以为,第二芯片3代替第二和第三磁传感器20、30,而包含:用于生成对应于与外部磁场的v方向平行的方向的分量和与外部磁场的z方向平行的方向的分量的检测值的2个磁传感器。
[0217]
此外,也可以为,第一芯片2代替第一磁传感器10,而包含:用于生成对应于与外部磁场的v方向平行的方向的分量的检测值的1个磁传感器,并且第二芯片3代替第二和第三磁传感器20、30,而包含:用于生成对应于与外部磁场的u方向平行的方向的分量的检测值和对应于与外部磁场的z方向平行的方向的分量的检测值的2个磁传感器。
[0218]
此外,处理器40也可以不包含于支承体4,也可以不与第一和第二芯片2、3一体化。
[0219]
此外,第一至第三磁传感器10、20、30也可以包含于1个芯片。在这种情况下,基准平面也可以为1个芯片的上表面。第一磁传感器10的元件配置区域与第二和第三磁传感器20、30的元件配置区域也可以包含于基准平面。
[0220]
此外,磁传感器装置1也可以不具备第一芯片2与第二芯片3中的一个。
[0221]
此外,第一磁传感器10的元件配置区域与第二和第三磁传感器20、30的元件配置区域也可以以从附图所示的姿态,以基准平面4a的重心c4为中心旋转90
°
的姿态进行设置。在这种情况下,第二基准方向成为与x方向平行的方向,第三基准方向成为与y方向平行的方向。
[0222]
此外,第一磁传感器10的元件配置区域与第二和第三磁传感器20、30的元件配置区域也可以以从附图所示的姿态,以基准平面4a的重心c4为中心旋转180
°
的姿态进行设置。
[0223]
此外,第一磁化方向相对于第二基准方向ry所成的角度也可以为0
°
或90
°
。
[0224]
此外,在第三至第五实施方式中,mr元件50的自由层54的磁化的方向也可以与第二实施方式相同。
[0225]
基于以上的说明,显然能够实施本发明的各种方式和变形例。因此,在权利请求的范围的均等范围内,也能够通过上述的最优的方式以外的方式实施本发明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1