水面及水下混合作业的捷联式动态重力测量方法及装置
本技术涉及重力测量,特别是涉及一种水面及水下混合作业的捷联式动态重力测量方法及装置。
背景技术:
1、海洋重力场不仅在地球科学及其相关学科中的研究中具有极其重要的作用,而且对远程战略武器装备的作战效能影响巨大,精细地测定海洋重力场具有显著的经济效益和科研研究与军事应用价值,可以用于海洋地理环境建设、海军未来作战以及海洋资源勘探等。
2、目前获取高精度海洋全域重力数据的手段是船载重力测量和水下动态重力测量。作为海洋探测装备的重要组成部分,水面/水下混合作业的捷联式动态重力测量系统可以精确测定水面及水下的重力场信息,构建海洋全域的重力场模型。在现有文献中,水下动态重力仪和船载重力仪是两个独立的仪器,船载重力仪只测量水面重力值,水下动态重力仪只测量水下重力值,船载重力数据处理方法与水下重力数据处理方法也是两个独立的体系,没有能够实现水面/水下混合作业的捷联式动态重力测量的方法。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够实现水面/水下混合作业的捷联式动态重力测量的一种水面及水下混合作业的捷联式动态重力测量方法、装置、计算机设备和存储介质。
2、一种水面及水下混合作业的捷联式动态重力测量方法,所述方法包括:
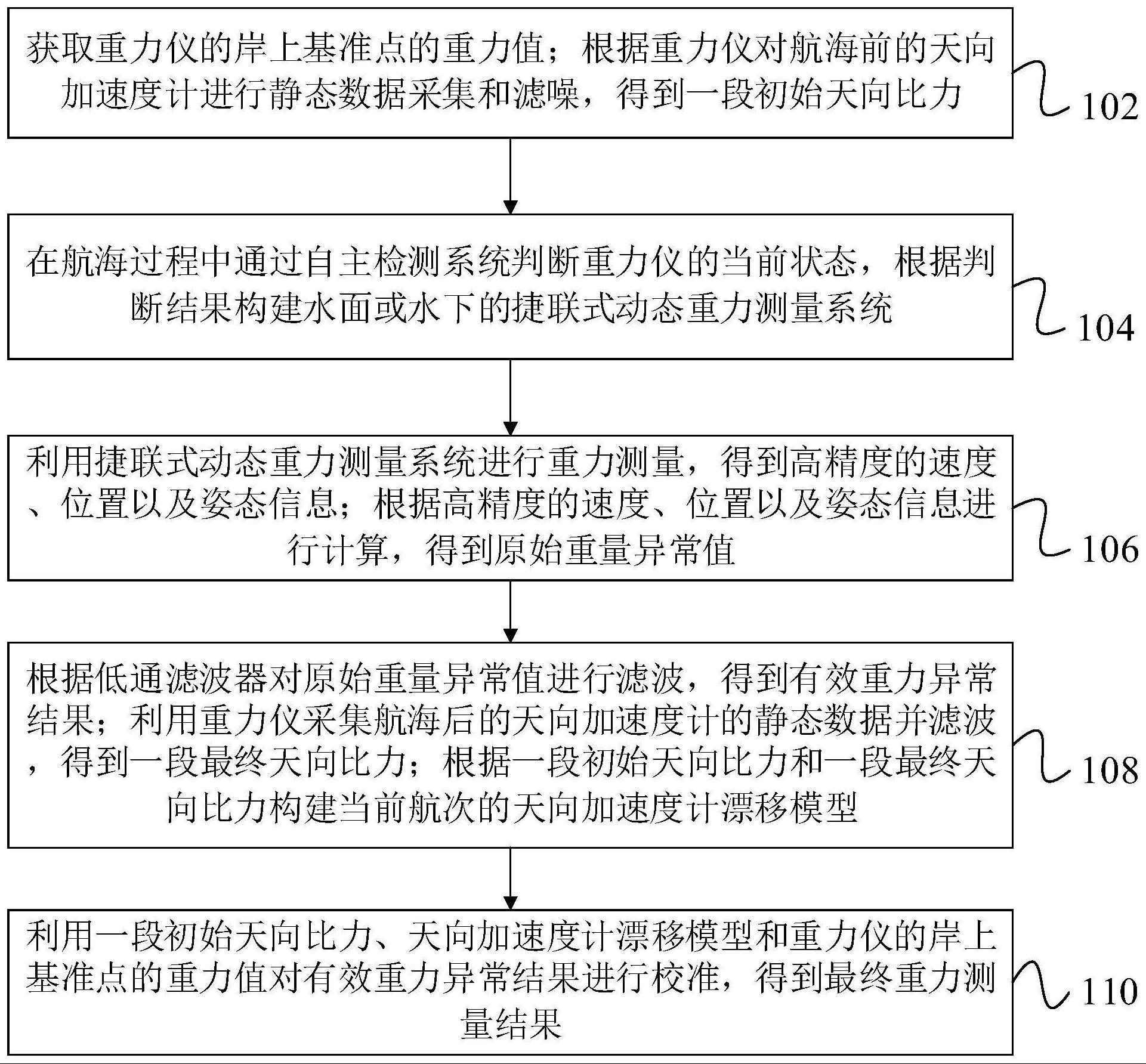
3、获取重力仪的岸上基准点的重力值;
4、根据重力仪对航海前的天向加速度计进行静态数据采集和滤噪,得到一段初始天向比力;
5、在航海过程中通过自主检测系统判断重力仪的当前状态,根据判断结果构建水面或水下的捷联式动态重力测量系统;
6、利用捷联式动态重力测量系统进行重力测量,得到高精度的速度、位置以及姿态信息;
7、根据高精度的速度、位置以及姿态信息进行计算,得到原始重力异常值;
8、根据低通滤波器对原始重力异常值进行滤波,得到有效重力异常结果;
9、利用重力仪采集航海后的天向加速度计的静态数据并滤波,得到一段最终天向比力;根据一段初始天向比力和一段最终天向比力构建当前航次的天向加速度计漂移模型;
10、利用一段初始天向比力、天向加速度计漂移模型和重力仪的岸上基准点的重力值对有效重力异常结果进行校准,得到最终重力测量结果。
11、在其中一个实施例中,在航海过程中通过自主检测系统判断重力仪的当前状态,根据判断结果构建水面或水下的捷联式重力测量系统,包括:
12、在航海过程中预先设置深度计的阈值为1.1,若深度计的压强值pdg≥1.1,且卫星接收机接收到的卫星数n<4,判断重力仪在水下;
13、若深度计的压强值pdg<1.1,或者卫星接收机接收到的卫星数n≥4,判断重力仪在水面。
14、在其中一个实施例中,当检测到重力仪在水面时,以重力仪为主导航系统,gnss为观测量构建水面的捷联式动态重力测量系统;
15、当检测到重力仪在水下时,对多普勒测速仪对底高度输出alt进行判断,若alt=0,则以重力仪为主导航系统,超短基线水下定位系统的水平位置以及深度计的深度为观测量构建水下的捷联式动态重力测量系统;若alt≠0,以重力仪为主导航系统,多普勒测速仪的速度、超短基线水下定位系统的水平位置以及深度计的深度为观测量构建水下的捷联式动态重力测量系统。
16、在其中一个实施例中,根据高精度的速度、位置以及姿态信息进行计算,得到原始重力异常值,包括:
17、当重力仪在水面时,根据高精度的速度、位置以及姿态信息进行计算,得到原始重力异常值为
18、
19、其中,fu为天向比力;ve、vn分别为东速和北速;rn、rm分别为卯酉圈和子午圈半径;l为地理纬度;h为高度/深度;γ为与纬度相关的正常重力值;ω为地球自转角速度。
20、在其中一个实施例中,当重力仪在水下时,根据高精度的速度、位置以及姿态信息进行计算,得到原始重力异常值为
21、
22、其中,γw为水下重力梯度改正。
23、在其中一个实施例中,根据一段初始天向比力和一段最终天向比力构建当前航次的天向加速度计漂移模型,包括:
24、根据一段初始天向比力和所述一段最终天向比力构建当前航次的天向加速度计漂移模型为
25、δ=a0+a1(t-t0)+a2(t-t0)2
26、
27、其中δ为重力仪天向加速度计漂移量;a0、a1和a2为重力仪天向加速度计长期漂移模型的参数;t为测线时间点,fs0、fs1、fs2…fsn均表示一段初始天向比力中任意一个初始天向比力,ts0、ts1、ts2…tsn表示fs0、fs1、fs2…fsn对应的测试时间,t0表示开始时刻,f0表示开始时刻t0的天向比力,fe0、fe1、fe2…fen表示一段最终天向比力中任意一个最终天向比力,te0、te1、te2…ten表示fe0、fe1、fe2…fen对应的测试时间。
28、在其中一个实施例中,利用一段初始天向比力、天向加速度计漂移模型和重力仪的岸上基准点的重力值对有效重力异常结果进行校准,得到最终重力测量结果,包括:
29、利用一段初始天向比力和天向加速度计漂移模型对有效重力异常结果进行校准,得到最终重力测量结果为其中,表示一段初始天向比力求平均值得到静态天向比力测量值,gb表示重力仪的岸上基准点的重力值。
30、一种水面及水下混合作业的捷联式动态重力测量装置,所述装置包括:
31、一段初始天向比力检测模块,用于获取重力仪的岸上基准点的重力值;根据重力仪对航海前的天向加速度计进行静态数据采集和滤噪,得到一段初始天向比力;
32、重力仪状态检测模块,用于在航海过程中通过自主检测系统判断重力仪的当前状态,根据判断结果构建水面或水下的捷联式动态重力测量系统;
33、重力测量模块,用于利用捷联式动态重力测量系统进行重力测量,得到高精度的速度、位置以及姿态信息;根据高精度的速度、位置以及姿态信息进行计算,得到原始重力异常值;
34、天向加速度计漂移模型构建模块,用于根据低通滤波器对原始重力异常值进行滤波,得到有效重力异常结果;利用重力仪采集航海后的天向加速度计的静态数据并滤波,得到一段最终天向比力;根据一段初始天向比力和一段最终天向比力构建当前航次的天向加速度计漂移模型;
35、重力异常结果校准模块,用于利用一段初始天向比力、天向加速度计漂移模型和重力仪的岸上基准点的重力值对有效重力异常结果进行校准,得到最终重力测量结果。
36、上述水面及水下混合作业的捷联式动态重力测量方法及装置,首先获取重力仪的岸上基准点的重力值;根据重力仪对航海前的天向加速度计进行静态数据采集和滤噪,得到一段初始天向比力;在航海过程中通过自主检测系统判断重力仪的当前状态,根据判断结果构建水面或水下的捷联式动态重力测量系统;利用捷联式动态重力测量系统进行重力测量,得到高精度的速度、位置以及姿态信息;根据高精度的速度、位置以及姿态信息进行计算,得到原始重力异常值;根据低通滤波器对原始重力异常值进行滤波,得到有效重力异常结果;利用重力仪采集航海后的天向加速度计的静态数据并滤波,得到一段最终天向比力;根据一段初始天向比力和一段最终天向比力构建当前航次的天向加速度计漂移模型;利用一段初始天向比力、天向加速度计漂移模型和重力仪的岸上基准点的重力值对有效重力异常结果进行校准,得到最终重力测量结果。本技术通过对航海过程中重力仪的当前状态实时构建水面或水下的捷联式动态重力测量系统进行重力测量,并利用航海前的一段初始天向比力和航海后的一段最终天向比力构建天向加速度计漂移模型,并利用一段初始天向比力、天向加速度计漂移模型和重力仪的岸上基准点的重力值对有效重力异常结果进行校准,不仅能够实现水面及水下的动态重力测量,操作简单,易执行,通用性强,还提高了重力测量的准确性。
- 还没有人留言评论。精彩留言会获得点赞!