一种全捷联激光和电视复合导引头标定方法与流程
1.本发明属于全捷联导引头标定领域,涉及一种全捷联激光和电视复合导引头标定方法,可同时简单快捷的标定装配误差,补偿装配误差引起的测角误差,提高全捷联激光/电视复合导引头的测角精度。
背景技术:
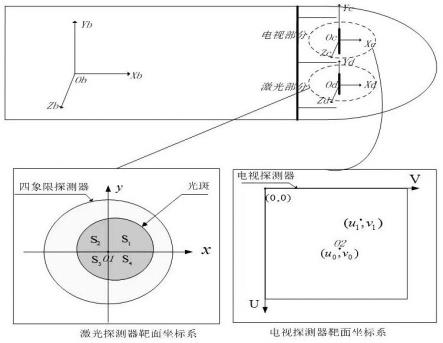
2.全捷联导引头瞬时光学视场大,同时激光/电视光电探测器固联于基准座,理想状态下激光光电探测器所在水平面应与ocxc垂直,电视光电探测器所在水平面应与odxd垂直,ocxc、odxd和obxb应相互平行,其示意如图1所示,激光探测器靶面坐标系图中s1、s2、s3和s4为激光光斑在激光探测器上的能量,o1为激光探测器靶面中心;电视探测器靶面坐标系图中(0,0)为坐标原点,(u0,v0)为光轴点坐标,(u1,v1)为目标在坐标系中的位置;o2为电视探测器靶面光轴点。实际工程应用中,由于加工与装配等原因,总会存在与理想状态下不同的情况,其误差主要包括结构误差和光学误差等;结构误差主要有激光部分、电路部分同轴度误差,基准座上的安装误差和光电探测器的安装误差;光学误差主要有焦距误差、像差误差和头罩误差等;而结构误差和光学误差可通过一定的标定方法补偿。在空间坐标系中上述误差描述为全捷联复合导引头电视部分坐标系o
c-xcyczc、激光部分o
d-xdydzd与弹体坐标系o
b-xbybzb之间的误差。
3.为了提高测角精度,保证装载全捷联复合导引头弹药的命中精度,必须对误差进行标定,以提高目标测角精度。然而,目前精确标定装配误差都是单独针对激光导引头或者电视导引头的装配误差标定,没有同时满足简单快捷全捷联激光/电视复合导引头误差标定方法。因此,研究一种能同时简单快捷标定全捷联激光/电视复合导引头的方法具有重要的工程应用价值。
技术实现要素:
4.本发明提供一种简单快捷的全捷联激光和电视复合导引头标定方法,可解决全捷联激光/电视复合导引头由于加工与装配等原因存在的,结构误差和光学误差造成角度测量精度下降的问题,从而实现复合导引头误差的精确补偿,为实现目标精确打击提供支撑。
5.本发明采用的技术解决方案如下:一种全捷联激光和电视复合导引头标定方法,标定过程中采用的部件包括全捷联激光和电视复合导引头、平行光管或激光光源、调平组件一、水平台、调平组件二、高精度数显转台、方管前置镜、标定工装、数据记录仪和供电装置;所述的标定方法通过如下步骤实现:步骤1、标定全捷联激光和电视复合导引头电视部分的光轴(u0,v0)及焦距fu和焦距fv;步骤2、标定全捷联激光和电视复合导引头激光部分的零位;步骤3、全捷联激光和电视复合导引头电视部分跟踪光轴(u0,v0)处目标,在方位方
向上,利用高精度数显转台同时标定全捷联激光/电视复合导引头;同理标定俯仰方向;步骤4、拟合高精度数显转台与全捷联激光和电视复合导引头输出数据。
6.进一步地,所述全捷联激光和电视复合导引头为被标定的主体,平行光管为全捷联激光和电视复合导引头模拟无穷远处的可见光目标,激光光源为全捷联激光和电视复合导引头模拟无穷远处的激光目标;所述调平组件一用于平行光管或激光光源水平面的调校,以实现平行光管或激光光源的绝对水平;所述调平组件二用于全捷联激光和电视复合导引头水平面的调校;所述方管前置镜用于校正光学仪器的光轴与安装基准面或指定靠面相对正确的位置,所述标定工装用于模拟弹体机械接口、安装全捷联激光和电视复合导引头,且能使全捷联激光和电视复合导引头转置90
°
安装,并提供方管前置镜的安装靠面;所述高精度数显转台用于实现方位回转运动并精确计量转动的角度,所述水平台承载平行光管或激光光源,以及高精度数显转台;所述数据记录仪与全捷联激光和电视复合导引头连接,记录调试过程中的相关数据,所述供电装置为全捷联激光和电视复合导引头、平行光管或激光光源、数据记录仪提供正常工作时的电源。
7.进一步地,步骤1中所述全捷联激光/电视复合导引头电视部分光轴(u0,v0)及焦距fu和焦距fv的标定,通过以下步骤实现:1)选用红外平行光管十字靶,将十字靶横线通过调平组件一调至水平;2)将全捷联激光和电视复合导引头与标定工装连接,并将方管前置镜置于标定工装的指定放置面并与指定靠面贴紧,通过转动高精度数显转台,及调节调平组件二,将方管前置镜内十字分划线调至与平行光管十字靶重合,并保持;3)全捷联激光和电视复合导引头上电,平行光管十字靶在全捷联激光和电视复合导引头图像中的位置即为光轴点位置(u0,v0);4)在方位方向上,利用高精度数显转台转动一角度θ1,尽量使平行光管十字靶在全捷联激光和电视复合导引头图像中的位置边缘v1得到方位方向的焦距为同理,得到高低方向焦距为
8.进一步地,步骤2中所述全捷联激光和电视复合导引头激光部分的零位标定,通过以下步骤实现:保持步骤1中标定系统状态,反复利用调平组件一调整激光光源位置;其中方位方向上,反复调整调平组件一,使全捷联激光和电视复合导引头激光部分输出为零;再利用高精度数显转台转动角度θ3,全捷联激光和电视复合导引头激光部分输出和高精度数显转台转动角度-θ3,全捷联激光和电视复合导引头激光部分输出相等,且值为容忍的最大误差之内;高低方向上,反复调整调平组件一,使全捷联激光和电视复合导引头激光部分输
出为零;再利用高精度数显转台转动角度θ3,全捷联激光和电视复合导引头激光部分输出和高精度数显转台转动角度-θ3,全捷联激光和电视复合导引头激光部分输出相等,且值为容忍的最大误差之内。
9.进一步地,步骤3中所述全捷联激光和电视复合导引头标定,通过以下步骤实现:保持步骤1和步骤2中系统的状态,在全捷联激光和电视复合导引头激光部分零位位置,使全捷联激光和电视复合导引头的电视部分跟踪位于光轴(u0,v0)处的目标;转动高精度数显转台,分别记录全捷联激光和电视复合导引头电视部分和激光部分数据;方位方向上电视部分输出按计算,激光部分输出按计算;同理高低方向上电视输出按计算,激光部分输出按计算。
10.进一步地,步骤4中所述拟合高精度数显转台与全捷联激光/电视复合导引头输出数据,通过以下步骤实现:采用多项式来补偿全捷联激光和电视复合导引头1由于加工与装配等原因存在结构误差和光学误差,五阶多项式方程为:y(x)=p4x4+p3x3+p2x2+p1x1+p0全捷联激光和电视复合导引头方位方向上激光部分输出[β
31
,β
32
,β
33
,β
34
,β
35
,β
36
,β
37
]和电视输出[b
31
,b
32
,b
33
,b
34
,b
35
,b
36
,b
37
]作为多项式的x,把y(x)作为高精度数显转台的角度值,通过最小二乘方原理得到最佳拟合曲线,即可得到方位方向上激光部分最佳拟合系数为[p
44
,p
43
,p
42
,p
41
,p
40
]和电视部分最佳拟合系数为[p
34
,p
33
,p
32
,p
31
,p
30
];全捷联激光和电视复合导引头高低方向上激光部分输出[α1,α2,α3,α4,α5,α6,α7]和电视部分输出[a1,a2,a3,a4,a5,a6,a7]作为多项式的x,把y(x)作为高精度数显转台的角度值,通过最小二乘方原理得到最佳拟合曲线,即可得到高低方向上激光部分最佳拟合系数为[p
24
,p
23
,p
22
,p
21
,p
20
]和电视部分最佳拟合系数为[p
14
,p
13
,p
12
,p
11
,p
10
]。
[0011]
与现有技术相比,本发明的有益效果如下:本发明方法能够解决全捷联激光/电视复合导引头由于加工与装配等原因存在结构误差和光学误差造成角度测量精度下降的问题,对其进行精确标定,对保证全捷联制导弹药的命中精度具有重要意义。同时,提供一种简单快捷的标定方法,标定设备通用性强,对标定场地没有特殊要求,对全捷联激光/电视复合导引头的低成本、高精度和批量生产具有重要作用。
附图说明
[0012]
图1为本发明全捷联激光/电视复合导引头误差示意图;图2为本发明全捷联激光/电视复合导引头标定系统组成示意图;图2中:1、全捷联激光和电视复合导引头,2、平行光管或激光光源,3、调平组件一,4、水平台,5、调平组件二,6、高精度数显转台,7、方管前置镜,8、标定工装。
具体实施方式
[0013]
下面结合附图对本发明实施例中的技术方案,进行清楚、完整地描述。
[0014]
如图2所示,本实施例的一种全捷联激光和电视复合导引头标定方法,在标定过程中采用的部件包括,全捷联激光和电视复合导引头1、平行光管或激光光源2、调平组件一3、水平台4、调平组件二5、高精度数显转台6、方管前置镜7、标定工装8、数据记录仪和供电装置。
[0015]
其中全捷联激光和电视复合导引头1为被标定的主体,平行光管为全捷联激光和电视复合导引头1模拟无穷远处的可见光目标,激光光源为全捷联激光和电视复合导引头模拟无穷远处的激光目标;调平组件一3用于平行光管或激光光源2水平面的调校,以实现平行光管或激光光源2的绝对水平;调平组件二5用于全捷联激光和电视复合导引头1水平面的调校;方管前置镜7用于校正光学仪器的光轴与安装基准面或指定靠面相对正确的位置,标定工装8用于模拟弹体机械接口、安装全捷联激光和电视复合导引头1,且能使全捷联激光和电视复合导引头1转置90
°
安装,并提供方管前置镜7的安装靠面;高精度数显转台6用于实现方位回转运动并精确计量转动的角度,水平台4承载平行光管或激光光源2,以及高精度数显转台6;数据记录仪与全捷联激光和电视复合导引头1连接,记录调试过程中的相关数据,供电装置为全捷联激光和电视复合导引头1、平行光管或激光光源2、数据记录仪提供正常工作时的电源。
[0016]
如图1所示,本实施例一种全捷联激光和电视复合导引头标定方法的具体实施步骤如下:步骤1、全捷联激光/电视复合导引头电视部分光轴(u0,v0)及焦距fu和焦距fv的标定;1)选用红外平行光管2十字靶,将十字靶横线通过调平组件一3调至水平;2)将全捷联激光和电视复合导引头1与标定工装8连接,并将方管前置镜7置于标定工装8的指定放置面并与指定靠面贴紧,通过转动高精度数显转台6,及调节调平组件二5,将方管前置镜7内十字分划线调至与平行光管2十字靶重合,并保持;3)全捷联激光和电视复合导引头1上电,平行光管2十字靶在全捷联激光和电视复合导引头1图像中的位置即为光轴点位置(u0,v0);4)在方位方向上,利用高精度数显转台6转动一角度θ1,尽量使平行光管2十字靶在全捷联激光和电视复合导引头1图像中的位置边缘v1得到方位方向的焦距为同理,得到高低方向焦距为
[0017]
步骤2、全捷联激光和电视复合导引头1激光部分的零位标定;保持步骤1中标定系统状态,反复利用调平组件一3调整激光光源位置;其中方位
方向上,反复调整调平组件一3,使全捷联激光和电视复合导引头1激光部分输出为零;再利用高精度数显转台6转动角度θ3,例如激光导引头线性视场,全捷联激光和电视复合导引头1激光部分输出和高精度数显转台6转动角度-θ3,全捷联激光和电视复合导引头1激光部分输出相等,且值为容忍的最大误差之内,例如容忍的最大误差为0.02;高低方向上,反复调整调平组件一3,使全捷联激光和电视复合导引头1激光部分输出为零;再利用高精度数显转台6转动角度θ3,例如激光导引头线性视场,全捷联激光和电视复合导引头1激光部分输出和高精度数显转台6转动角度-θ3,全捷联激光和电视复合导引头1激光部分输出相等,且值为容忍的最大误差之内,例如容忍的最大误差为0.02。
[0018]
步骤3、全捷联激光和电视复合导引头1标定;保持步骤1和步骤2中系统的状态,在全捷联激光和电视复合导引头1激光部分零位位置,使全捷联激光和电视复合导引头1的电视部分跟踪位于光轴(u0,v0)处的目标;转动高精度数显转台6,以转动
±
3度为例,分别记录全捷联激光和电视复合导引头1电视部分和激光部分数据;方位方向上电视部分输出按计算,激光部分输出按计算;同理高低方向上电视输出按计算,激光部分输出按计算;方位方向标定过程记录数据如表1所示。
[0019]
表1全捷联激光/电视复合导引头方位方向标定记录数据
同理,高低方向记录数据如表2所示。
[0020]
表2全捷联激光/电视复合导引头高低方向标定记录数据序号转台角度(
°
)激光部分电视部分1-3b
31
a12-2b
32
a23-1b
33
a340b
34
a451b
35
a562b
36
a673b
37
a7[0021]
步骤4、拟合高精度数显转台与全捷联激光/电视复合导引头输出数据;采用五阶多项式来补偿全捷联激光和电视复合导引头1由于加工与装配等原因存在结构误差和光学误差,五阶多项式方程为:y(x)=p4x4+p3x3+p2x2+p1x1+p0全捷联激光和电视复合导引头1方位方向上激光部分输出[β
31
,β
32
,β
33
,β
34
,β
35
,β
36
,β
37
]和电视输出[b
31
,b
32
,b
33
,b
34
,b
35
,b
36
,b
37
]作为多项式的x,把y(x)作为高精度数显转台6的角度值,通过最小二乘方原理得到最佳拟合曲线,即可得到方位方向上激光部分最佳拟合系数为[p
44
,p
43
,p
42
,p
41
,p
40
]和电视部分最佳拟合系数为[p
34
,p
33
,p
32
,p
31
,p
30
];全捷联激光和电视复合导引头1高低方向上激光部分输出[α1,α2,α3,α4,α5,α6,α7]和电视部分输出[a1,a2,a3,a4,a5,a6,a7]作为多项式的x,把y(x)作为高精度数显转台6的角度值,通过最小二乘方原理得到最佳拟合曲线,即可得到高低方向上激光部分最佳拟合系数为[p
24
,p
23
,p
22
,p
21
,p
20
]和电视部分最佳拟合系数为[p
14
,p
13
,p
12
,p
11
,p
10
]。
[0022]
上述实施例描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1