一种用于轨道检测的时栅辅助惯性测量系统及方法
1.本发明属于轨道检测领域,具体涉及一种用于轨道检测的时栅辅助惯性测量系统及方法。
背景技术:
2.轨道可以视为三维空间曲线,其形状表征为轨道参数(轨向、轨距、超高、曲率等),轨道的变形必然伴随着位置和方位角等信息的改变,即轨道的几何形状改变了轨道各里程点的相对空间关系;因此轨道几何状态检测的实质就是检测轨道变形后轨道各里程点之间的位置相对关系和姿态相对关系,钢轨的三维位置坐标结合轨距和水平则可描述整个轨道系统的几何状态。由此可见轨道几何状态测量问题本质上是两根钢轨的定位、定姿问题。
3.惯性导航技术可以动态测量与之固定连接的载体的俯仰角、横滚角、航向角、位置、速度等信息。若将惯性导航系统与运动在轨道上的载体(即轨检小车)固定连接,通过惯性导航系统解算出轨检小车的三维姿态、位置、速度等信息,由此解算出轨道的三维位置坐标和姿态,则可实现轨道几何状态动态检测。
4.惯性导航是一种自主导航系统,在已知初始位置的状态下,利用惯性器件(即三轴光纤陀螺仪和三轴加速度计)的输出信息,不断进行导航解算,最终获得与惯性导航系统固定连接的载体(即轨检小车)的三维姿态、位置(经度、纬度)、速度等信息,但是由于惯性导航是靠获得三轴加速度计的信息进行积分运算,从而获得载体的速度和位移,随着时间的推移,由于积分的累积效应,从而存在误差。为了减小这种导航累积误差,可以采用其他外部导航信息对其进行修正。目前最常用的是利用gps\北斗等各种外部导航信息来进行组合导航,以此减小这种累积误差,降低系统对惯性器件精度的依赖,进而在降低整个系统成本的前提下提高惯性导航系统的精度。然而如果在隧道、桥洞以及建筑物遮挡,或者受天气影响等无法接gps\北斗等各种外部导航信息的情况下,这种组合导航的修正方法就会失效,使得导航精度下降。
技术实现要素:
5.本发明的目的是提供一种用于轨道检测的时栅辅助惯性测量系统及方法,以对解算出的轨检小车的三维姿态进行修正,减小惯性测量的累积误差,从而提高惯性姿态测量精度。
6.本发明所述的用于轨道检测的时栅辅助惯性测量系统,包括固定安装在轨检小车车体上的惯性导航系统,所述惯性导航系统包括导航计算机和与导航计算机连接的三轴加速度计、三轴光纤陀螺仪,导航计算机根据三轴加速度计、三轴光纤陀螺仪测量的信息解算出轨检小车的三维姿态、游移方位角ε、位置和速度ⅲ;所述惯性测量系统还包括安装在轨检小车上且与导航计算机连接的时栅传感器,时栅传感器将测量的信息发送给导航计算机,导航计算机根据时栅传感器测量的信息解算出轨检小车的速度ⅱ和里程,导航计算机利用解算出的轨检小车的三维姿态中的航向角、游移方位角ε、位置、速度ⅲ(即根据三轴加
速度计、三轴光纤陀螺仪测量的信息解算出的轨检小车的速度)、速度ⅱ(即根据时栅传感器测量的信息解算出的轨检小车的速度)和里程,建立量测矢量,并进行卡尔曼滤波,得到轨检小车的三维(即x、y、z方向)姿态误差,然后利用该三维姿态误差对解算出的轨检小车的三维姿态进行修正,输出修正之后的轨检小车的三维姿态。
7.所述时栅传感器包括时栅激励模块、时栅定子和时栅转子,时栅激励模块和时栅定子固定安装在轨检小车车体侧面,时栅转子安装在轨检小车车轮内与时栅定子正对,且随轨检小车车轮转动,时栅激励模块与时栅定子连接,时栅激励模块产生激励信号作用于时栅定子,时栅转子与导航计算机连接,时栅转子将感应的能反应轨检小车的速度ⅱ和里程的信号(即时栅传感器测量的信息)发送给导航计算机。
8.时栅传感器的基本原理可简述为“以时间差测量空间差”,时栅传感器把一段空间位置之差(位移)表现为一段时间差,从而实现了用又精又密的时钟脉冲去度量位移。时栅传感器可以同时获取反应位移和时间差的信息,则反应速度的信息也可以同时获取;由此可以解算获得轨检小车的(实时精密)里程和速度ⅱ。
9.本发明所述的用于轨道检测的时栅辅助惯性测量方法,采用上述时栅辅助惯性测量系统,该时栅辅助惯性测量方法包括:
10.导航计算机根据时栅传感器测量的信息解算出轨检小车的速度ⅱ和里程。
11.导航计算机根据三轴加速度计、三轴光纤陀螺仪测量的信息解算出轨检小车的三维姿态、游移方位角ε、位置和速度ⅲ。
12.导航计算机利用解算出的轨检小车的三维姿态中的航向角、游移方位角ε、位置、速度ⅲ、速度ⅱ和里程,在此基础上建立量测矢量,并进行卡尔曼滤波,得到轨检小车的三维姿态误差。
13.导航计算机利用该三维姿态误差对解算出的轨检小车的三维姿态进行修正,输出修正之后的轨检小车的三维姿态。
14.所述导航计算机建立量测矢量的具体方式为:
15.将当前解算的轨检小车的位置纬度与前一次解算的轨检小车的位置纬度相减,得到解算的轨检小车的位置纬度差值
16.将当前解算的轨检小车的位置经度与前一次解算的轨检小车的位置经度相减,得到解算的轨检小车的位置经度差值
17.利用公式:计算轨检小车的位置纬度增量值利用公式:计算轨检小车的位置经度增量值其中,δs为当前解算的轨检小车的里程,r为地球半径,α为当前解算的轨检小车的(三维姿态中的)航向角,为当前解算的轨检小车的位置纬度。
18.建立4维量测矢量z=[z1z2z3z4];其中,
[0019]
z1=v
xt-v
xs
,
[0020]
z2=v
yt-v
ys
,
[0021]
[0022][0023]vxt
为由速度ⅱ(即根据时栅传感器测量的信息解算出的轨检小车的速度)分解的x方向速度、v
yt
为由速度ⅱ分解的y方向速度,v
xs
为由速度ⅲ(即根据三轴加速度计、三轴光纤陀螺仪测量的信息解算出的轨检小车的速度)分解的x方向速度,v
ys
为由速度ⅲ分解的y方向速度,
[0024]
所述导航计算机进行卡尔曼滤波,得到轨检小车的三维姿态误差的具体步骤包括:
[0025]
第一步、基于9维状态向量建立误差方程及系统的状态方程模型,计算系统的状态转移矩阵fk,然后执行第二步;其中,δλ为轨检小车的位置经度误差,为轨检小车的位置纬度误差,δh为轨检小车的位置高度误差,δv
x
为轨检小车的x方向速度误差,δvy为轨检小车的y方向速度误差,δvz为轨检小车的z方向速度误差,φ
x
为轨检小车的x方向姿态误差,φy为轨检小车的y方向姿态误差,φz为轨检小车的z方向姿态误差。
[0026]
第二步、根据k-1时刻的状态估计值x
k-1
、系统的状态转移矩阵fk,估算k时刻的系统状态然后执行第三步;其中,
[0027]
第三步、根据k-1时刻的不确定度p
k-1
、系统的状态转移矩阵fk,计算k时刻的不确定度pk,然后执行第四步;其中,pk=fk*p
k-1
*f
kt
,f
kt
表示fk的转置矩阵;不确定度通过误差协方差来表示系统的模型准确度。
[0028]
第四步、计算卡尔曼滤波增益kk,然后执行第五步;其中,kk=pk*h
kt
*(hk*pk*h
kt
+rk)-1
,hk表示量测矩阵,描述量测值与状态值之间的关系,rk表示量测噪声阵,描述传感器的测量噪声,h
kt
表示hk的转置矩阵。
[0029]
第五步、计算k时刻的经过4维量测矢量修正后的状态估计值xk,得到k时刻的9维误差量δλ、δh、δv
x
、δvy、δvz、φ
x
、φy、φz的具体数值,然后执行第六步;其中,zk表示k时刻的4维量测矢量。
[0030]
第六步、将通过第五步得到的φ
x
、φy、φz的具体数值作为所述轨检小车的三维(即x、y、z方向)姿态误差,然后执行第七步。
[0031]
第七步、将k时刻的不确定度更新为(i-kk*hk)*pk,并使k累加1,然后返回执行第二步;其中,i表示单位矩阵。
[0032]
本发明利用惯性导航系统+时栅传感器组合成时栅辅助惯性测量系统来进行轨道检测。导航计算机利用根据三轴加速度计、三轴光纤陀螺仪测量的信息解算出的轨检小车的三维姿态中的航向角、游移方位角ε、位置和速度ⅲ(三维姿态中的航向角、游移方位角ε、位置和速度ⅲ为惯性测量信息)以及根据时栅传感器测量的信息解算出的轨检小车的速度ⅱ和里程,在此基础上建立量测矢量,并进行卡尔曼滤波,得到轨检小车的三维姿态误差,然后利用该三维姿态误差对解算出的轨检小车的三维姿态进行修正,输出修正之后的轨检小车的三维姿态(为高精度姿态信息),用于测量轨道的几何状态信息,从而减小了惯性测量的累积误差,提高了惯性姿态测量精度。该时栅辅助惯性测量系统不再依赖外部导航信息对惯性测量信息进行修正,而是靠根据时栅传感器测量的信息解算出的轨检小车的速度
ⅱ
和精密的里程对惯性测量信息进行修正,在不依赖外部卫星导航信息的前提下完成高精度的轨检小车的三维姿态测量;由此形成低成本、高精度的惯性测量新系统及方法,满足我国铁路和城市轨道建设中轨道几何状态检测精度要求。
附图说明
[0033]
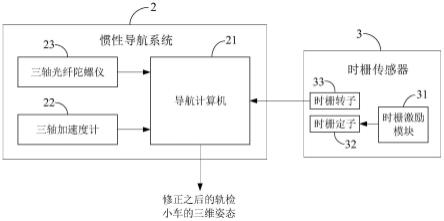
图1为本实施例中用于轨道检测的时栅辅助惯性测量系统的原理框图。
[0034]
图2为本实施例中惯性导航系统、时栅传感器在轨检小车上的安装位置示意图。
[0035]
图3为本实施例中用于轨道检测的时栅辅助惯性测量方法流程图。
[0036]
图4为本实施例中导航计算机进行卡尔曼滤波的流程图。
具体实施方式
[0037]
如图1、图2所示,本实施例中用于轨道检测的时栅辅助惯性测量系统包括惯性导航系统2和时栅传感器3。
[0038]
惯性导航系统2固定安装在轨检小车车体1上,惯性导航系统2包括导航计算机21、三轴加速度计22和三轴光纤陀螺仪23,三轴加速度计22、三轴光纤陀螺仪23正交布置且与导航计算机21连接。
[0039]
时栅传感器3包括时栅激励模块31、时栅定子32和时栅转子33,时栅激励模块31和时栅定子32固定安装在轨检小车车体侧面,时栅转子33安装在轨检小车车轮4内与时栅定子32正对,且随轨检小车车轮4转动,时栅激励模块31与时栅定子32连接,时栅激励模块31产生激励信号作用于时栅定子32,时栅转子33与导航计算机21连接,时栅转子33将感应的能反应轨检小车的速度ⅱ和里程的信号发送给导航计算机21。时栅转子33和时栅定子32采用fpcb(即挠性印刷电路板,是一种利用柔性基材制成的具有图形的印刷电路板,由绝缘基材和导电层构成),可根据需要任意改变时栅定子和时栅转子的尺寸、形状等结构。
[0040]
如图3所示,本实施例中用于轨道检测的时栅辅助惯性测量方法,采用上述时栅辅助惯性测量系统,该时栅辅助惯性测量方法具体包括:
[0041]
步骤一、导航计算机21根据时栅转子33感应的能反应轨检小车的速度ⅱ和里程的信号(即时栅传感器测量的信息)解算出轨检小车的(精密)速度ⅱ和(精密)里程。
[0042]
步骤二、导航计算机21根据三轴加速度计、三轴光纤陀螺仪测量的信息解算出轨检小车的三维姿态(包括航向角、俯仰角、横滚角)、游移方位角ε、位置和速度ⅲ。
[0043]
步骤三、导航计算机21利用解算出的轨检小车的三维姿态中的航向角、游移方位角ε、位置、速度ⅲ、速度ⅱ和里程,建立量测矢量,并进行卡尔曼滤波,得到轨检小车的三维(即x、y、z方向)姿态误差。
[0044]
其中,导航计算机21利用解算出的轨检小车的三维姿态中的航向角、游移方位角ε、位置、速度ⅲ、速度ⅱ和里程,建立量测矢量的具体方式为:
[0045]
将当前解算的轨检小车的位置纬度与前一次解算的轨检小车的位置纬度相减,得到解算的轨检小车的位置纬度差值
[0046]
将当前解算的轨检小车的位置经度与前一次解算的轨检小车的位置经度相减,得到解算的轨检小车的位置经度差值
[0047]
利用公式:计算轨检小车的位置纬度增量值利用公式:计算轨检小车的位置经度增量值其中,δs为当前解算的轨检小车的里程,r为地球半径,α为当前解算的轨检小车的航向角,为当前解算的轨检小车的位置纬度。
[0048]
建立4维量测矢量z=[z1z2z3z4];其中,
[0049]
z1=v
xt-v
xs
,
[0050]
z2=v
yt-v
ys
,
[0051][0052][0053]vxt
为由速度ⅱ(即根据时栅转子感应的信号解算出的轨检小车的速度)分解的x方向速度、v
yt
为由速度ⅱ分解的y方向速度,v
xs
为由速度ⅲ(即根据三轴加速度计、三轴光纤陀螺仪测量的信息解算出的轨检小车的速度)分解的x方向速度,v
ys
为由速度ⅲ分解的y方向速度,
[0054]
如图4所示,导航计算机21进行卡尔曼滤波,得到轨检小车的三维(即x、y、z方向)姿态误差的具体步骤包括:
[0055]
第一步、基于9维状态向量建立误差方程及系统的状态方程模型,计算系统的状态转移矩阵fk,然后执行第二步;其中,δλ为轨检小车的位置经度误差,为轨检小车的位置纬度误差,δh为轨检小车的位置高度误差,δv
x
为轨检小车的x方向速度误差,δvy为轨检小车的y方向速度误差,δvz为轨检小车的z方向速度误差,φ
x
为轨检小车的x方向姿态误差,φy为轨检小车的y方向姿态误差,φz为轨检小车的z方向姿态误差。
[0056]
第二步、根据k-1时刻的状态估计值x
k-1
、系统的状态转移矩阵fk,估算k时刻的系统状态然后执行第三步;其中,初始的状态估计值x0内的数值设置为0。
[0057]
第三步、根据k-1时刻的不确定度p
k-1
、系统的状态转移矩阵fk,计算k时刻的不确定度pk,然后执行第四步;其中,pk=fk*p
k-1
*f
kt
,f
kt
表示fk的转置矩阵;不确定度通过误差协方差来表示系统的模型准确度。初始的不确定度p0内的数值设置为0。
[0058]
第四步、计算卡尔曼滤波增益kk(即量测量相对于状态量的修正权重),然后执行第五步;其中,kk=pk*h
kt
*(hk*pk*h
kt
+rk)-1
,hk表示量测矩阵,描述量测值与状态值之间的关系,rk表示量测噪声阵,描述传感器的测量噪声;h
kt
表示hk的转置矩阵。
[0059]
第五步、计算k时刻的经过4维量测矢量修正后的状态估计值xk,得到k时刻的9维误差量δλ、δh、δv
x
、δvy、δvz、φ
x
、φy、φz的具体数值,然后执行第六步;其中,zk表示k时刻的4维量测矢量(即k时刻的z=[z1z2 z3 z4])。
[0060]
第六步、将通过第五步得到的φ
x
、φy、φz的具体数值作为轨检小车的三维(即x、y、z方向)姿态误差,然后执行第七步。
[0061]
第七步、将k时刻的不确定度更新为(i-kk*hk)*pk(即使pk=(i-kk*hk)*pk),并使k
累加1(即使k=k+1),然后返回执行第二步,继续进行三维姿态误差迭代计算;其中,i表示单位矩阵。
[0062]
步骤四、利用三维姿态误差对解算出的轨检小车的三维姿态进行修正,输出修正之后的轨检小车的三维姿态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1