一种三维空间中发射站与移动目标联合定位方法
1.本发明属于目标定位技术领域,具体涉及一种发射站位置未知,三维空间发射站与移动目标联合定位方法。
背景技术:
2.无源定位包括基于发射站自身发射的信号和基于第三方发射站两种类型进行定位。无源定位由于不需要接收站自身发射信号,不太容易暴露自己,具有较强的安全性与反侦察能力。一般的无源定位都采用两步定位法,即先获得有关目标位置的一些参数,比如到达角(doa)、到达时间差(tdoa)、到达频差(fdoa)等,然后再利用这些参数进行目标位置的解算。
3.在定位中,发射站的位置可能是不准确的,甚至是未知的。例如,当发射站位置随时间变化时,其位置可能不可靠或不能实时估计,或者发射站位于gps无法提供位置估计的位置。针对发射站位置未知的场景,提出了一种发射站和目标位置的联合估计方法。该场景涉及了上述两种无源定位类型,首先估计发射站位置相当于是利用了发射站自身发射的信号,然后估计目标位置相当于利用第三方发射站进行目标定位。该方法通过接收目标反射第三方发射站的反射信号和发射站的直达波信号,利用多个发射站、目标与接收站之间的测量值,包括接收站相对于发射站的方位角、俯仰角,接收站接收到发射站的信号与另一接收站接收到发射站的信号之间的距离,接收站相对于目标的方位角、俯仰角,接收站接收到发射站的信号与接收站接收到发射站经目标反射的信号之间的距离等,将多个测量方程联合起来,利用加权最小二乘的方法进行求解,从而实现发射站和目标位置的定位。
4.相比于采用先估计发射端位置,再将发射端位置代入估计目标位置的连续估计法。显然联合估计考虑了参数相关性,因此具有更好的性能。
技术实现要素:
5.针对上述问题,本发明提出了一种联合多个参数的三维空间定位方法。
6.本发明采用的技术方案是:
7.该场景下有多个发射站与接收站,且发射站位置未知,所以该定位方法包括目标与发射站的定位。可以利用多个发射站、目标与接收站之间的测量值联合求解,从而实现定位;定位包括以下步骤:
8.s1、接收机有m个,位置准确已知,分别位于假定有k部静止的发射站,但位置未知,假定位于目标位于u=[x,y,z]
t
。由该场景,可以获得以下的测量值:
[0009]
(1)、接收站m相对于发射站k的方位角为:
[0010]
[0011]
(2)、接收站m相对于发射站k的俯仰角为:
[0012][0013]
(3)、接收站m接收到发射站k的信号与接收站i接收到发射站k的信号之间的时差乘上光速归一化为距离差为:
[0014][0015]
(4)、接收站m相对于目标的方位角为:
[0016][0017]
(5)、接收站m相对于目标的俯仰角为:
[0018][0019]
(6)、接收站m接收到发射站k的信号与接收站m接收到发射站k经目标u反射的信号之间的时差乘上光速归一化为距离差为:
[0020][0021]
其中,是各个测量值的噪声,分别服从方差为的零均值高斯分布。
[0022]
s2、定义:
[0023]rk
=|u-tk|
[0024][0025][0026]
其中|
·
|代表取欧几里得距离,(
·
)
t
代表对括号内取转置。下面将上面矩阵中的元素表示出来(om×n代表行为m行,列为n列的零矩阵):
[0027][0028]
其中:
[0029]
[0030][0031][0032]
其中:
[0033][0034][0035]
其中:
[0036][0037][0038][0039][0040]
其中,
[0041][0042][0043][0044]
其中,
[0045][0046][0047]
其中,
[0048][0049]
[0050][0051][0052]
其中,
[0053][0054][0055][0056]
其中,
[0057][0058][0059][0060]
其中,
[0061][0062][0063][0064][0065][0066]
[0067][0068][0069][0070]
其中:
[0071][0072][0073][0074]
其中:
[0075][0076][0077][0078][0079]
其中:
[0080][0081][0082][0083]
其中:
[0084][0085][0086]
[0087][0088]
其中:
[0089][0090][0091][0092][0093][0094][0095][0096]
其中,
[0097][0098][0099]
其中:
[0100][0101][0102][0103][0104][0105][0106]
[0107][0108]
由上述参数定义可以将测量方程组表示为:
[0109]
aζ=b+ε
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(25)
[0110]
s3、故伪线性方程组(25)的最小二乘解ls为:
[0111]
ζ
ls
=(a
t
a)-1atbꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0112]
其加权最小二乘解为
[0113][0114]
这里,
[0115]qε
=e(εε
t
)=ce(nn
t
)c
t
[0116]
其中,e(
·
)代表取期望。
[0117]
s4、下面对式(27)得出的结果进行解相关操作。在这里利用泰勒展开的解相关操作,式(1)到(6)可以组合写成:
[0118]
θ=f(u,t1,
…
,tk,r1,
…rk
)+n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(28)
[0119]
由泰勒展开为:
[0120][0121]
又可以得到如下关系:
[0122][0123]
利用加权最小二乘解得
[0124][0125]
最终的目标与发射站位置可以表示为
[0126][0127]
其中是加权最小二乘求出的中的第1~3+3k项。
[0128]
本发明的有益效果为可以准确估计出目标与发射站的位置,估计误差能达到crb界,方法简单,效果良好。
附图说明
[0129]
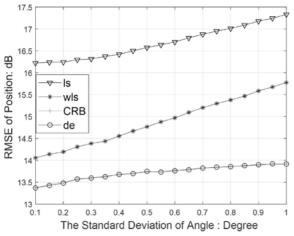
图1为基于接收站相对于发射站的方位角误差变化的定位性能比较图;
[0130]
图2为基于接收站相对于发射站的俯仰角误差变化的定位性能比较图;
[0131]
图3为基于接收站接收到发射站的信号与另一接收站接收到发射站的信号之间的距离误差变化的定位性能比较图;
[0132]
图4为基于接收站相对于目标的方位角误差变化的定位性能比较图;
[0133]
图5为基于接收站相对于目标的俯仰角误差变化的定位性能比较图;
[0134]
图6为接收站接收到发射站的信号与接收站接收到发射站经目标反射的信号之间的距离误差变化的定位性能比较图;
具体实施方式
[0135]
下面结合实施例对本发明进行详细的描述:
[0136]
采用10000次蒙特卡罗模拟一个简单的定位场景。假设目标位于(1e3,1e3,200)m处,四个接收站位置表示为矩阵[1550,-1300,50,1300;-1700,20,1600,30;200,20,100,30]。“ls法”是指可以推导出目标位置的最小二乘解的方法,“wls法”是指加权最小二乘的方法,“de”指的是利用泰勒展开解相关后的算法,crb是克拉美罗界的缩写。当距离误差为10m,其他角度误差为1
°
时,改变接收站相对于发射站的方位角误差0.1
°
到1
°
来验证算法性能,如图1所示。当距离误差为10m,其他角度误差为1
°
时,改变接收站相对于发射站的俯仰角误差0.6
°
到2
°
来验证算法性能,如图2所示。当距离误差为10m,其他角度误差为1
°
时,改变接收站接收到发射站的信号与另一接收站接收到发射站的信号之间的距离误差10m到100m来验证算法性能,如图3所示。当距离误差为10m,其他角度误差为1
°
时,改变接收站相对于目标的方位角误差0.2
°
到2
°
来验证算法性能,如图4所示。当距离误差为10m,其他角度误差为1
°
时,改变接收站相对于目标的俯仰角误差0.6
°
到2
°
来验证算法性能,如图5所示。当距离误差为10m,其他角度误差为1
°
时,改变接收站接收到发射站的信号与接收站接收到发射站经目标反射的信号之间的距离误差10m到100m来验证算法性能,如图6所示。
[0137]
定位效果:
[0138]
为了验证定位算法的有效性,通过改变角度误差、距离误差来观察算法性能。由图1-图6可以观察到,随着角度误差、距离误差等的改变,估计的曲线都能达到crb界,证实了本发明所提的三维空间定位方法的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1