一种多功能船舶电场、磁场测量装置
1.本发明涉及电场、磁场测量技术领域,具体涉及一种多功能船舶电场、磁场测量装置。
背景技术:
2.电场是电荷及变化磁场周围空间里存在的一种特殊物质。这种物质与通常的实物不同,它虽然不是由分子原子所组成的,但它却是客观存在的特殊物质,具有通常物质所具有的力和能量等客观属性。电场的力的性质表现为:电场对放入其中的电荷有作用力,这种力称为电场力。电场的能的性质表现为:当电荷在电场中移动时,电场力对电荷做功,说明电场具有能量。
3.磁场,物理概念,是指传递实物间磁力作用的场。磁场是由运动着的微小粒子构成的,在现有条件下看不见、摸不着。磁场具有粒子的辐射特性。磁体周围存在磁场,磁体间的相互作用就是以磁场作为媒介的,所以两磁体不用在物理层面接触就能发生作用。由于磁体的磁性来源于电流,电流是电荷的运动,因而概括地说,磁场是相对于观测点运动的电荷的运动的电场的强度与速度,带来的观测点处电荷所受力的变化的表现。
4.船舶在海水中航行时,将引起周围电场、磁场出现异常信号。为了突破限制对船舶探测技术发展的瓶颈问题,亟需获取大量的船舶物理场信号。
5.现有装置存在以下不足:
6.1.由于海洋中有很多海洋生物,当本装置长时间位于海水的情况下,海洋生物容易附着在电场传感器和磁场传感器的表面,影响二者监测性能即测量数据的精准度,例如一些藻类。
7.2.不同吃水深度的船舶途径时所产生的电场和磁场均不同,现有装置的整体高度无法调节,降低了测量的灵活性和精度。
8.3.仅靠底盘与海底接触,装置容易在海流的冲击作用下随意晃动或翻转,影响测量工作。
9.4.没有设计定位装置的结构,后期打捞装置十分不方便,同时装置没有设计自动上升的结构,需要借助船只,增加了布放和打捞的成本。
技术实现要素:
10.本发明的目的在于提供一种多功能船舶电场、磁场测量装置。
11.为达此目的,本发明采用以下技术方案:
12.一种多功能船舶电场、磁场测量装置,包括圆形底盘,
13.还包括控制器、安装舱、检测机构、固定机构和调节机构,圆形底盘的顶部固定设有密封舱,
14.固定机构设在安装舱的内部以用来固定圆形底盘,固定机构包括伸缩组件和四个锥形插杆,圆形底盘上等间距开设有四个插孔,每个插孔的内壁上均固定设有密封圈,四个
锥形插杆固定设在伸缩组件的底部,且每个锥形插杆的底部均与一个密封圈的内部插接,
15.调节机构设在安装舱的顶部以用来调节装置的整体高度,调节机构包括旋转组件和两个伸缩杆,两个伸缩杆固定设在安装舱的顶部,旋转组件设在安装舱的顶部和安装舱的底部之间,安装舱固定设在调节机构的顶部,
16.检测机构设计在安装舱的内部以用来检测船舶的电场和磁场,检测机构包括安装板、供电组件、数据处理组件和监测组件,安装板固定设在安装舱的内部,供电组件和数据处理组件均设在安装板的顶部,监测组件设在安装舱的外壁上,伸缩组件、供电组件、数据处理组件和监测组件与控制器均为电性连接。
17.进一步的,安装舱包括顶壳和底壳,底壳固定设在两个伸缩杆的顶部之间,顶壳通过若干个螺栓固定设在底壳的顶部,且底壳的外壁上固定设有四个推进器,顶壳和底壳的外壁上均固定设有翼板,每个推进器均与控制器电连接。
18.进一步的,监测组件包括磁场传感器和电场传感器,磁场传感器和电场传感器分别固定设在位于底壳外壁上的两个翼板上,磁场传感器和电场传感器均与控制器电连接。
19.进一步的,供电组件包括电池和供电管理器,电池和供电管理器均固定设在安装板的顶部,电池与供电管理器电连接,电池和供电管理器均与控制器电连接。
20.进一步的,数据处理组件包括传感器信号调理器和数据采集转换存储器,传感器信号调理器和数据采集转换存储器均固定设在安装板的顶部,两个磁场传感器和两个电场传感器均与传感器信号调理器电连接,且传感器信号调理器和数据采集转换存储器均与控制器电连接。
21.进一步的,伸缩组件包括伺服电机、连杆、转盘和十字杆,伺服电机固定设在安装舱的内部,转盘套设在其输出端上,安装舱的内部固定设有导杆,十字杆滑动设置在导杆的外壁上,连杆铰接设置在转盘的外壁和十字杆的顶部之间,四个锥形插杆均与十字杆的底部固定连接,伺服电机与控制器电连接。
22.进一步的,旋转组件包括套杆、丝杆、手轮和托套,套杆固定设在安装舱的顶部,托套固定设在底壳的底部,丝杆螺纹连接柱套杆的内部,丝杆的顶部固定设有嵌块,嵌块与托套的内壁转动连接,手轮固定设在丝杆靠近托套的一端外壁上。
23.进一步的,安装板的顶部还固定设有gps传感器,gps传感器与控制器电连接。
24.进一步的,位于底壳外壁上的每个翼板的顶部均固定设有支撑板,支撑板上插设有防水直线电机,其输出端上固定设有拉块,翼板的顶部还铰接设置有摆杆,拉块远离防水直线电机的一端与摆杆的下半部铰接,支撑板的顶部还滑动设有顶杆,翼的顶部还固定设有两个导轨,两个导轨之间滑动设有刮板,刮板的顶部与顶杆的一端固定连接,顶杆的另一端与摆杆的顶部抵触,顶杆靠近摆杆的一端外壁上固定设有限位环,限位环和支撑板之间抵触设置有缓冲弹簧,缓冲弹簧与顶杆的外壁套接,防水直线电机与控制器电连。
25.进一步的,每个锥形插杆的内部均设有安装孔,安装孔的内壁上固定设有隔板,隔板的顶部插设有微型电动推杆,其输出端穿过隔板,其输出端上固定设有倒梯形推块,安装孔的内壁上呈对称设置有两个安装杆,每个安装杆上均插设有两个滑杆,两个滑杆的一端固定设有楔块,两个滑杆的另一端固定设有三个插片,每个滑杆的外壁上均套设有复位弹簧,安装杆和楔块分别与每个复位弹簧的两端抵触,倒梯形推块的两端固定设有两个插条,每个楔块靠近倒梯形推块的一端外壁上均设有供插条滑动的滑槽,安装杆的圆周方向上的
外壁上呈对称设置有六个避让缺口,每个插片均与一个避让缺口的截面形状一致,微型电动推杆与控制器电连接。
26.本发明的有益效果:
27.1.本发明通过设计支撑板、防水直线电机、拉块、摆杆、顶杆、刮板、限位环和缓冲弹簧,由于海洋中有很多海洋生物,当本装置长时间位于海水的情况下,海洋生物容易附着在电场传感器和磁场传感器的表面,影响监测性能,例如一些藻类,在控制器的内部预设一个定时程序,当程序启动时,通过控制器启动防水直线电机,从而使其输出端带动拉块向远离摆杆的一端拉动,由于摆杆的底部与翼板铰接,摆杆的顶部与顶杆的一端抵触,又因为摆杆的下半部与拉块铰接,顶杆与支撑板插接,刮板的顶部与顶杆远离摆杆的一端固定连接,刮板的两个侧壁分别与两个导轨滑动连接,且刮板的底部与电场传感器和磁场传感器的顶部表面接触,进而使得刮板对二者表面进行刮动,将附着在二者表面的海洋生物刮掉,达到一个自动清理功能,确保电场传感器和磁场传感器始终正常运作,不会产生感应不灵敏的问题,进而提升测量数据的精准度及本装置的使用寿命,缓冲弹簧确保刮板缓速滑动,防止力度过大刮坏电场传感器和磁场传感器的表面。
28.2.本发明通过设计调节机构,即旋转组件和两个伸缩杆,当需要检测吃水深度不同的船舶的电场和磁场时,通过人工旋转手轮,由于手轮与丝杆的外壁固定连接,从而带动丝杆旋转,由于丝杆的下半部套杆螺纹连接,丝杆的顶部通过嵌块与托套转动连接,又因为托套的顶部与底壳的底部固定连接,套杆的底部与安装舱的顶部固定连接,进而带动丝杆边上升边旋转,进而对底壳底部进行顶升,加之,底壳与两个伸缩杆的顶部固定连接,进而使得底壳跟随两个伸缩杆同步上升,进而调节安装舱及其内部检测机构的整体高度,以用来检测同一海域不同吃水深度的船舶的电场和磁场,因而提升本装置的灵活性。
29.3.本发明通过设计固定机构,即伸缩组件和四个锥形插杆,当本装置布放到海底后,即圆形底盘与海底接触后,通过控制器启动伺服电机,从而带动转盘旋转,又因为十字杆与导杆滑动连接,四个锥形插杆均与十字杆的底部固定连接,又因为转盘的外壁和十字杆的顶部分别与连杆的两端铰接,进而带动十字杆及其底部的四个锥形插杆下降插入海底土壤内,以达到抓地效果,用来提升底盘的稳固性,防止本装置随波逐流而影响测量工作。
30.4.本发明通过设计隔板、微型电动推杆、倒梯形推块、安装杆、滑杆、楔块、插片、复位弹簧和插条,由于锥形插杆的外壁是光滑的,在一些海底水流湍急的海域布放本装置时,湍急的水流会带动插杆移位甚至拔出,因而仅仅依靠四个锥形插杆是远远不够固定底盘的,当遇到这种情况时,在锥形插杆扎入海底土壤后,通过控制器启动微型电动推杆,从而带动其输出端向下伸出,因而带动其输出端上的倒梯形推块向靠近两个斜块的中部位置滑动,由于每个插条均与一个滑槽滑动,每个楔块均通过两个滑杆与安装杆滑动连接,又因为每两个滑杆远离楔块的一端与三个插片固定连接,进而通过倒梯形推块下降时对两个楔块的抵触力带动两个楔块相互远离,进而带动六个插片相互远离而从六个避让缺口伸出,进一步在锥形插杆插入海底土壤的部分进行二次限位,利用锥形插杆和六个插片与海底土壤的穿插提升抓地效果,防止本装置在海底水流湍急的海域放置不稳,进一步提升固定效果,而在取出本装置时,只需通过控制器带动微型电动推杆的输出端收缩,在复位弹簧的作用下即可六个插片收回,进而方便插杆从海底土壤中拔出,实现本装置的打捞,方便快捷,在提升本装置抓地效果的同时不会影响装置后续的打捞,提升了本装置的灵活性。
31.5.本发明通过设计监测组件,即磁场传感器和电场传感器,磁场传感器和电场传感器用来测量途径的船舶产生的电场和磁场,并通过控制器发送给控制中心的pc端上,进而方便检测人员及时查看并记录测量的数据。
32.6.本发明通过设计四个推进器,测量工作开始前,首先将本装置竖直放入海水中,然后通过控制器启动四个推进器,方便本装置入水后保持姿态平稳下沉,不至于装置晃动甚至翻转,有利于提升本装置的下沉效率,进而提升布放效率,同时通过设计gps传感器,在后续打捞时,先用gps传感器实现本装置的定位,然后通过四个推进器内设置的风扇反转,带动本装置从海底升起,提升打捞效率。
附图说明
33.为了更清楚地说明本发明实施例的技术方案,下面对本发明实施例中的附图作简单地介绍。
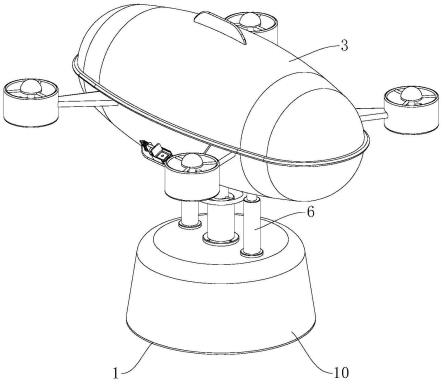
34.图1为本发明的立体结构示意图一;
35.图2为本发明安装舱、密封舱和套杆的剖视图;
36.图3为图2中的a处放大图;
37.图4为图2中的b处放大图;
38.图5为图2中的c处放大图;
39.图6为本发明的平面结构示意图;
40.图7为图6中的d处放大图;
41.图8为本发明的立体结构示意图二;
42.图9为图8中的e处放大图;
43.图10为本发明顶壳和底壳的立体分解示意图;
44.图11为本发明锥形插杆的平面剖视图;
45.图12为图11中的f处放大图;
46.图中:圆形底盘1,密封舱10,密封圈100,控制器2,安装舱3,顶壳30,底壳31,推进器310,支撑板311,防水直线电机312,拉块313,摆杆314,顶杆315,刮板316,限位环317,缓冲弹簧318,检测机构4,安装板40,gps传感器400,供电组件41,电池410,供电管理器411,数据处理组件42,传感器信号调理器420,数据采集转换存储器421,监测组件43,磁场传感器430,电场传感器431,固定机构5,伸缩组件50,伺服电机500,连杆501,转盘502,十字杆503,锥形插杆51,调节机构6,旋转组件60,套杆600,丝杆601,手轮602,托套603,嵌块604,伸缩杆61,隔板7,微型电动推杆70,倒梯形推块71,安装杆72,滑杆73,楔块74,插片75,复位弹簧76,插条77。
具体实施方式
47.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
48.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
49.实施例一
50.参照图1所示,本发明提供技术方案,一种多功能船舶电场、磁场测量装置,包括圆形底盘1,
51.还包括控制器2、安装舱3、检测机构4、固定机构5和调节机构6,圆形底盘1的顶部固定设有密封舱10,
52.固定机构5设在密封舱10的内部以用来固定圆形底盘1,固定机构5包括伸缩组件50和四个锥形插杆51,圆形底盘1上等间距开设有四个插孔,每个插孔的内壁上均固定设有密封圈100,四个锥形插杆51固定设在伸缩组件50的底部,且每个锥形插杆51的底部均与一个密封圈100的内部插接,
53.调节机构6设在密封舱10的顶部以用来调节装置的整体高度,调节机构6包括旋转组件60和两个伸缩杆61,两个伸缩杆61固定设在密封舱10的顶部,旋转组件60设在密封舱10的顶部和安装舱3的底部之间,安装舱3固定设在调节机构6的顶部,
54.检测机构4设计在安装舱3的内部以用来检测船舶的电场和磁场,检测机构4包括安装板40、供电组件41、数据处理组件42和监测组件43,安装板40固定设在安装舱3的内部,供电组件41和数据处理组件42均设在安装板40的顶部,监测组件43设在安装舱3的外壁上,伸缩组件50、供电组件41、数据处理组件42和监测组件43与控制器2均为电性连接。
55.参照图6所示,安装舱3包括顶壳30和底壳31,底壳31固定设在两个伸缩杆61的顶部之间,顶壳30通过若干个螺栓固定设在底壳31的顶部,且底壳31的外壁上固定设有四个推进器310,顶壳30和底壳31的外壁上均固定设有翼板300,每个推进器310均与控制器电连接,顶壳30和底壳31通过若干个螺栓固定连接,方便拆装,而检测机构4内包涵的电器元件均安装在顶壳30和底壳31的内部,安装舱3具有优良的密封性,能够有效防止海水进入损伤电器元件,伸缩组件50和监测组件43均通过水密电缆接入安装舱3内的控制器2上,测量工作开始前,首先将本装置竖直放入海水中,然后通过控制器2启动四个推进器310,方便本装置入水后保持姿态平稳下沉,不至于装置晃动甚至翻转,有利于提升本装置的下沉效率,进而提升布放效率。
56.参照图7所示,监测组件43包括磁场传感器430和电场传感器431,磁场传感器430和电场传感器431分别固定设在位于底壳31外壁上的两个翼板300上,磁场传感器430和电场传感器431均与控制器2电连接,磁场传感器430和电场传感器431用来测量途径的船舶产生的电场和磁场,并通过控制器2发送给控制中心的pc端上,从而方便检测人员及时查看并记录测量的数据。
57.参照图5所示,供电组件41包括电池410和供电管理器411,电池410和供电管理器411均固定设在安装板40的顶部,电池410与供电管理器411电连接,电池410和供电管理器411均与控制器2电连接,电池410用来向供电管理器411供电,而供电管理器411向控制器2供电,控制器2控制各个电器元件稳定工作,进而证整个装置的稳定运作和续航。
58.参照图5所示,数据处理组件42包括传感器信号调理器420和数据采集转换存储器421,传感器信号调理器420和数据采集转换存储器421均固定设在安装板40的顶部,两个磁场传感器430和两个电场传感器431均与传感器信号调理器420电连接,且传感器信号调理器420和数据采集转换存储器421均与控制器2电连接,传感器信号调理器420用来调理测量的电场和磁场信号,数据采集转换存储器421则用于采集测量的存储电场和磁场信号,提升测量精度。
59.参照图2所示,伸缩组件50包括伺服电机500、连杆501、转盘502和十字杆503,伺服电机500固定设在密封舱10的内部,转盘502套设在其输出端上,密封舱10的内部固定设有导杆,十字杆503滑动设置在导杆的外壁上,连杆501铰接设置在转盘502的外壁和十字杆503的顶部之间,四个锥形插杆51均与十字杆503的底部固定连接,伺服电机500与控制器2电连接,当本装置布放到海底后,即圆形底盘1与海底接触后,通过控制器2启动伺服电机500,从而带动转盘502旋转,又因为十字杆503与导杆滑动连接,四个锥形插杆51均与十字杆503的底部固定连接,又因为转盘502的外壁和十字杆503的顶部分别与连杆501的两端铰接,进而带动十字杆503及其底部的四个锥形插杆51下降插入海底土壤内,以达到抓地效果,用来提升底盘的稳固性,防止本装置随波逐流而影响测量工作。
60.参照图4所示,旋转组件60包括套杆600、丝杆601、手轮602和托套603,套杆600固定设在密封舱10的顶部,托套603固定设在底壳31的底部,丝杆601螺纹连接柱套杆600的内部,丝杆601的顶部固定设有嵌块604,嵌块604与托套603的内壁转动连接,手轮602固定设在丝杆601靠近托套603的一端外壁上,当需要检测吃水深度不同的船舶的电场和磁场时,通过人工旋转手轮602,由于手轮602与丝杆601的外壁固定连接,从而带动丝杆601旋转,由于丝杆601的下半部套杆600螺纹连接,丝杆601的顶部通过嵌块604与托套603转动连接,又因为托套603的顶部与底壳31的底部固定连接,套杆600的底部与密封舱10的顶部固定连接,进而带动丝杆601边上升边旋转,进而对底壳31底部进行顶升,加之,底壳31与两个伸缩杆61的顶部固定连接,进而使得底壳31跟随两个伸缩杆61同步上升,进而调节安装舱3及其内部检测机构4的整体高度,以用来检测同一海域不同吃水深度的船舶的电场和磁场,因而提升本装置的灵活性。
61.参照图5所示,安装板40的顶部还固定设有gps传感器400,gps传感器400与控制器2电连接,gps传感器400实时提供本装置的位置,从而方便后续寻找及打捞。
62.参照图9所示,位于底壳31外壁上的每个翼板300的顶部均固定设有支撑板311,支撑板311上插设有防水直线电机312,其输出端上固定设有拉块313,翼板300的顶部还铰接设置有摆杆314,拉块313远离防水直线电机312的一端与摆杆314的下半部铰接,支撑板311的顶部还滑动设有顶杆315,翼板300的顶部还固定设有两个导轨,两个导轨之间滑动设有刮板316,刮板316的顶部与顶杆315的一端固定连接,顶杆315的另一端与摆杆314的顶部抵触,顶杆315靠近摆杆314的一端外壁上固定设有限位环317,限位环317和支撑板311之间抵触设置有缓冲弹簧318,缓冲弹簧318与顶杆315的外壁套接,防水直线电机312与控制器电连接,由于海洋中有很多海洋生物,当本装置长时间位于海水的情况下,海洋生物容易附着在电场传感器和磁场传感器的表面,影响监测性能,例如一些藻类,在控制器2的内部预设一个定时程序,当程序启动时,通过控制器2启动防水直线电机312,从而使其输出端带动拉块313向远离摆杆314的一端拉动,由于摆杆314的底部与翼板300铰接,摆杆314的顶部与顶杆315的一端抵触,又因为摆杆314的下半部与拉块313铰接,顶杆315与支撑板311插接,刮板316的顶部与顶杆315远离摆杆314的一端固定连接,刮板316的两个侧壁分别与两个导轨滑动连接,且刮板316的底部与电场传感器431和磁场传感器430的顶部表面接触,进而使得刮板316对二者表面进行刮动,将附着在二者表面的海洋生物刮掉,确保电场传感器431和磁场传感器430始终正常运作,不会产生感应不灵敏的问题,进而提升测量数据的精准度及本装置的使用寿命,缓冲弹簧318确保刮板316缓速滑动,防止力度过大刮坏电场传感器431
和磁场传感器430的表面。
63.工作原理:测量工作开始前,首先将本装置竖直放入海水中,然后通过控制器2启动四个推进器310,方便本装置入水后保持姿态平稳下沉,不至于装置晃动甚至翻转,有利于提升本装置的下沉效率,进而提升布放效率。
64.当本装置布放到海底后,即圆形底盘1与海底接触后,通过控制器2启动伺服电机500,从而带动转盘502旋转,又因为十字杆503与导杆滑动连接,四个锥形插杆51均与十字杆503的底部固定连接,又因为转盘502的外壁和十字杆503的顶部分别与连杆501的两端铰接,进而带动十字杆503及其底部的四个锥形插杆51下降插入海底土壤内,以达到抓地效果,用来提升底盘的稳固性,防止本装置随波逐流而影响测量工作。
65.当需要检测吃水深度不同的船舶的电场和磁场时,通过人工旋转手轮602,由于手轮602与丝杆601的外壁固定连接,从而带动丝杆601旋转,由于丝杆601的下半部套杆600螺纹连接,丝杆601的顶部通过嵌块604与托套603转动连接,又因为托套603的顶部与底壳31的底部固定连接,套杆600的底部与密封舱10的顶部固定连接,进而带动丝杆601边上升边旋转,进而对底壳31底部进行顶升,加之,底壳31与两个伸缩杆61的顶部固定连接,进而使得底壳31跟随两个伸缩杆61同步上升,进而调节安装舱3及其内部检测机构4的整体高度,以用来检测同一海域不同吃水深度的船舶的电场和磁场,因而提升本装置的灵活性。
66.顶壳30和底壳31通过若干个螺栓固定连接,方便拆装,而检测机构4内包涵的电器元件均安装在顶壳30和底壳31的内部,安装舱3具有优良的密封性,能够有效防止海水进入损伤电器元件,伸缩组件50和监测组件43均通过水密电缆接入安装舱3内的控制器2上。
67.磁场传感器430和电场传感器431用来测量途径的船舶产生的电场和磁场,并通过控制器2发送给控制中心的pc端上,从而方便检测人员及时查看并记录测量的数据。
68.由于海洋中有很多海洋生物,当本装置长时间位于海水的情况下,海洋生物容易附着在电场传感器和磁场传感器的表面,影响监测性能,例如一些藻类,在控制器2的内部预设一个定时程序,当程序启动时,通过控制器2启动防水直线电机312,从而使其输出端带动拉块313向远离摆杆314的一端拉动,由于摆杆314的底部与翼板300铰接,摆杆314的顶部与顶杆315的一端抵触,又因为摆杆314的下半部与拉块313铰接,顶杆315与支撑板311插接,刮板316的顶部与顶杆315远离摆杆314的一端固定连接,刮板316的两个侧壁分别与两个导轨滑动连接,且刮板316的底部与电场传感器431和磁场传感器430的顶部表面接触,进而使得刮板316对二者表面进行刮动,将附着在二者表面的海洋生物刮掉,确保电场传感器431和磁场传感器430始终正常运作,不会产生感应不灵敏的问题,进而提升测量数据的精准度及本装置的使用寿命。
69.传感器信号调理器420用来调理测量的电场和磁场信号,数据采集转换存储器421则用于采集测量的存储电场和磁场信号,提升测量数据的精准度。
70.电池410用来向供电管理器411供电,而供电管理器411向控制器2供电,控制器2控制各个电器元件稳定工作,进而证整个装置的稳定运作和续航。
71.gps传感器400实时提供本装置的位置,从而配合四个推进器310方便对后续本装置的定位及打捞。
72.实施例二
73.参照图11和图12所示,为了提升四个插杆的抓地效果,进一步提升底盘的稳定性,
每个锥形插杆51的内部均设有安装孔,安装孔的内壁上固定设有隔板7,隔板7的顶部插设有微型电动推杆70,其输出端穿过隔板7,其输出端上固定设有倒梯形推块71,安装孔的内壁上呈对称设置有两个安装杆72,每个安装杆72上均插设有两个滑杆73,两个滑杆73的一端固定设有楔块74,两个滑杆73的另一端固定设有三个插片75,每个滑杆73的外壁上均套设有复位弹簧76,安装杆72和楔块74分别与每个复位弹簧76的两端抵触,倒梯形推块71的两端固定设有两个插条77,每个楔块74靠近倒梯形推块71的一端外壁上均设有供插条77滑动的滑槽,安装杆72的圆周方向上的外壁上呈对称设置有六个避让缺口,每个插片75均与一个避让缺口的截面形状一致,微型电动推杆70与控制器2电连接,由于锥形插杆51的外壁是光滑的,在一些海底水流湍急的海域布放本装置时,湍急的水流会带动插杆移位甚至拔出,因而仅仅依靠四个锥形插杆51是远远不够固定底盘的,当遇到这种情况时,在锥形插杆51扎入海底土壤后,通过控制器2启动微型电动推杆70,从而带动其输出端向下伸出,因而带动其输出端上的倒梯形推块71向靠近两个斜块的中部位置滑动,由于每个插条77均与一个滑槽滑动,每个楔块74均通过两个滑杆73与安装杆72滑动连接,又因为每两个滑杆73远离楔块74的一端与三个插片75固定连接,进而通过倒梯形推块71下降时对两个楔块74的抵触力带动两个楔块74相互远离,进而带动六个插片75相互远离而从六个避让缺口伸出,进一步在锥形插杆51插入海底土壤的部分进行二次限位,利用锥形插杆51和六个插片75与海底土壤的穿插提升抓地效果,防止本装置在海底水流湍急的海域放置不稳,进一步提升固定效果,而在取出本装置时,只需通过控制器2带动微型电动推杆70的输出端收缩,在复位弹簧76的作用下即可六个插片75收回,进而方便插杆从海底土壤中拔出,实现本装置的打捞,方便快捷,在提升本装置抓地效果的同时不会影响装置后续的打捞,提升了本装置的灵活性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1